

25.161. (С) Продольная балансировка должна обеспечиваться в следующих условиях:
(1) при наборе высоты
на режиме максимальной продолжительной
тяги со скоростью не выше
![]() ,
с убранным шасси и закрылками в убранном
(i)
и во взлетной (ii)
положениях.
,
с убранным шасси и закрылками в убранном
(i)
и во взлетной (ii)
положениях.
![]() -
скорость сваливания или минимальная
скорость установившегося полета,
полученная в конкретной конфигурации.
-
скорость сваливания или минимальная
скорость установившегося полета,
полученная в конкретной конфигурации.
(2) при снижении с убранным газом на скорости не выше с выпущенным шасси и закрылками в убранном (i) и в выпущенном (ii) положениях, при наиболее неблагоприятной центровке, утвержденной для посадки независимо от веса ВС.
(3) во время
горизонтального полета при любой
скорости в диапазоне от
до
![]() с убранными шасси и закрылками в диапазоне
от
до
с убранными шасси и закрылками в диапазоне
от
до
![]() при выпущенном шасси.
при выпущенном шасси.
![]() - максимальная эксплуатационная и
максимальная скорость полета с выпущенным
шасси.
- максимальная эксплуатационная и
максимальная скорость полета с выпущенным
шасси.
25.173. Продольная статическая устойчивость.
(а) Для достижения
и выдерживания скоростей, ниже заданной
балансировочной скорости, требуются
тянущие усилия (![]() ),
а для достижения и выдерживания скоростей
выше заданной балансировочной –
толкающие усилия (
),
а для достижения и выдерживания скоростей
выше заданной балансировочной –
толкающие усилия (![]() ).
).
(в) скорость полета должна восстанавливаться в пределах 10% исходной балансировочной в условиях набора высоты, захода на посадку и посадки и в пределах 73,5% исходной балансировочной скорости в условиях крейсерского полета.
(с) среднее значение
![]() должно быть не менее 0,5кгс/10
должно быть не менее 0,5кгс/10![]() .
.
(А) Допускается
нулевой градиент
![]() в диапазоне скоростей
в диапазоне скоростей
![]() сигн. до
сигн. до
![]() .
.
Лекция 5. 3. Боковое движение.
Боковое движение исследуется обычно в
зависимости от параметров опорного
продольного движения: углов атаки и
тангажа, угловой скорости
![]() ,
скорости и высоты полета. Часто
рассматривается сначала какой-либо
опорный невозмущенный полет с заданным
креном, углом скольжения или прямолинейный
полет без крена и скольжения, а затем
изучается характер изменения параметров
бокового движения
,
скорости и высоты полета. Часто
рассматривается сначала какой-либо
опорный невозмущенный полет с заданным
креном, углом скольжения или прямолинейный
полет без крена и скольжения, а затем
изучается характер изменения параметров
бокового движения
![]() и т.п. в зависимости от разных факторов.
Рассмотрим применяемые математические
модели для аэродинамических сил и
моментов в боковом движении.
и т.п. в зависимости от разных факторов.
Рассмотрим применяемые математические
модели для аэродинамических сил и
моментов в боковом движении.
3.1. Аэродинамические моменты крены и рыскания
При
ассиметричном обтекании ВС воздушным
потоком относительно плоскости XOY
из-за скольжения возникает аэродинамическая
поперечная сила, складывается из сил,
действующих на фюзеляж
![]() ,
вертикальное оперение
,
вертикальное оперение
![]() и гондолы двигателей
и гондолы двигателей
![]()
![]() (3.1)
(3.1)
где:
![]()
![]()
соответствующие коэффициенты сил,
площади и коэффициенты торможения
потока около указанных элементов ВС.
Коэффициент аэродинамической поперечной
силы ВС при нейтральном положении руля
направления (![]() )
)
![]() ,
(3.2)
,
(3.2)
принимается
![]() и при
и при
![]() (скольжение на правое полукрыло)
(скольжение на правое полукрыло)
![]() ,
т.е. поперечная сила направлена в сторону
левого полукрыла. Так как мы будем
рассматривать углы скольжения
,
т.е. поперечная сила направлена в сторону
левого полукрыла. Так как мы будем
рассматривать углы скольжения
![]() в пределах ±20°, то часто принимается
в пределах ±20°, то часто принимается
![]() .
При этом между поперечной силой
.
При этом между поперечной силой
![]() и боковой
и боковой
![]() существует связь:
существует связь:
![]()
С учетом малости
![]() получаем
получаем
![]() ,
,
или, когда значения Х невелики, то
![]() .
.
Так же как и для продольного движения
можно суммировать все моменты, возникающие
от отдельных частей ВС, предполагая
неизменной его конфигурацию. В качестве
опорного движения примем прямолинейное
движение с неизменной скоростью, а
боковое – в малой окрестности его с
отклоненными рулем направления и
элеронами, со скольжением и по линейной
траектории (![]() ).
).
В этом случае коэффициенты моментов крена и рыскания записываются в следующем виде
![]() (3.3)
(3.3)
![]() ,
(3.4)
,
(3.4)
где
![]()
![]()
В основном работа двигателей приводит
к поперечной силе
![]() и моментов от нее
и моментов от нее
![]() за счет косой обдувки воздухозаборников
при скольжении.
за счет косой обдувки воздухозаборников
при скольжении.
![]() определяется так же как
определяется так же как
![]() (см. разд. 2.2). Производные моментов можно
оценить так же как и в продольном движении
по приближенным формулам. Чаще всего
эти значения определяются и даются в
зависимости от скорости полета (или М),
угла атаки.
(см. разд. 2.2). Производные моментов можно
оценить так же как и в продольном движении
по приближенным формулам. Чаще всего
эти значения определяются и даются в
зависимости от скорости полета (или М),
угла атаки.
Рассмотрим здесь принятые обозначения,
физическую сущность моментов, их
определение. Величина
![]() принимается
при
принимается
при
![]() в прямолинейном горизонтальном полете
и зависит от скорости и балансировочного
угла атаки.
в прямолинейном горизонтальном полете
и зависит от скорости и балансировочного
угла атаки.
Момент
![]() называют
момент поперечной статической
устойчивости, а
называют
момент поперечной статической
устойчивости, а
![]() -
характеризует степень поперечной
статической устойчивости. Все
производные коэффициентов моментов
являются функциями
и V(M) и в
частности
-
характеризует степень поперечной
статической устойчивости. Все
производные коэффициентов моментов
являются функциями
и V(M) и в
частности
![]() -
(при отрицательной
)
будет играть роль «восстанавливающего»
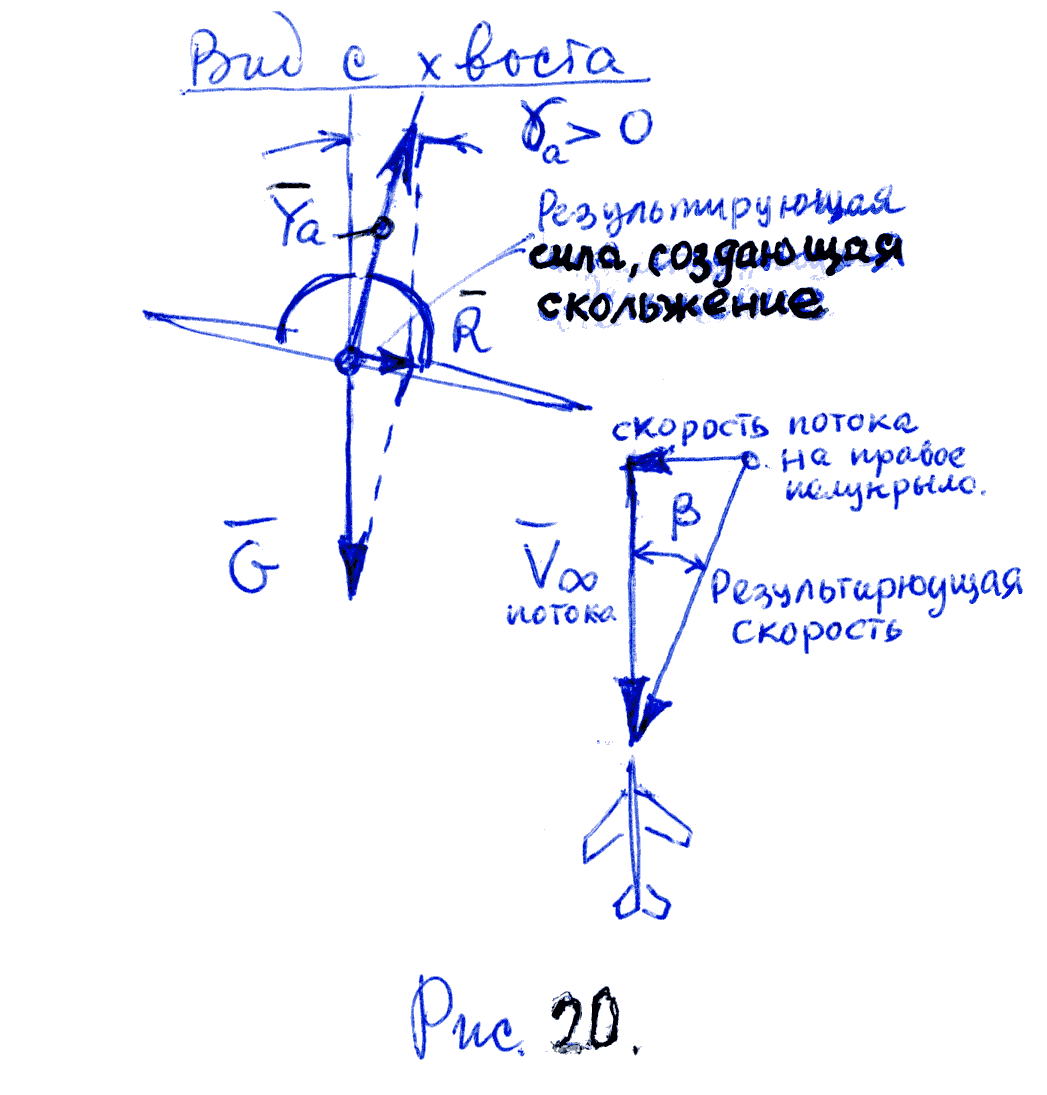
момента. Так, например при крене на
правое полукрыло будет возникать
скольжение в сторону опускающегося
правого полукрыла, т.к. результирующая
сила
-
(при отрицательной
)
будет играть роль «восстанавливающего»
момента. Так, например при крене на
правое полукрыло будет возникать
скольжение в сторону опускающегося
правого полукрыла, т.к. результирующая
сила
![]() играет роль центростремительной (см.рис.
20) неуравновешенной силы, искривляющей
траекторию в сторону опущенного полукрыла
и после суммирования скорости
невозмущенного потока и скорости потока,
набегающего на правое полукрыло, видно,
что угол скольжения
будет положительным.
играет роль центростремительной (см.рис.
20) неуравновешенной силы, искривляющей
траекторию в сторону опущенного полукрыла
и после суммирования скорости
невозмущенного потока и скорости потока,
набегающего на правое полукрыло, видно,
что угол скольжения
будет положительным.
При
![]() момент
момент
![]() будет стремиться уменьшить величину
первоначального крена
,
т.е. является «восстанавливающим».
Моменты
будет стремиться уменьшить величину
первоначального крена
,
т.е. является «восстанавливающим».
Моменты![]() называются
управляющими в «канале крена» и при
положительных
называются
управляющими в «канале крена» и при
положительных
![]() обычно
являются отрицательными, т.е.
обычно
являются отрицательными, т.е.
![]() <0
и
<0
и
![]() <0.
<0.
 Моменты
Моменты
![]() называют
управляющими в «канале рыскания».
При отклонении элеронов, например, на
правом полукрыле вниз а на левом вверх
происходит перераспределение давление
воздушного потока ближе к концам крыльев
и в результате на правом увеличится
нормальная сила
называют
управляющими в «канале рыскания».
При отклонении элеронов, например, на
правом полукрыле вниз а на левом вверх
происходит перераспределение давление
воздушного потока ближе к концам крыльев
и в результате на правом увеличится
нормальная сила
![]() (также и подъемная), а на левом - уменьшится
(см. рис. 21).
(также и подъемная), а на левом - уменьшится
(см. рис. 21).
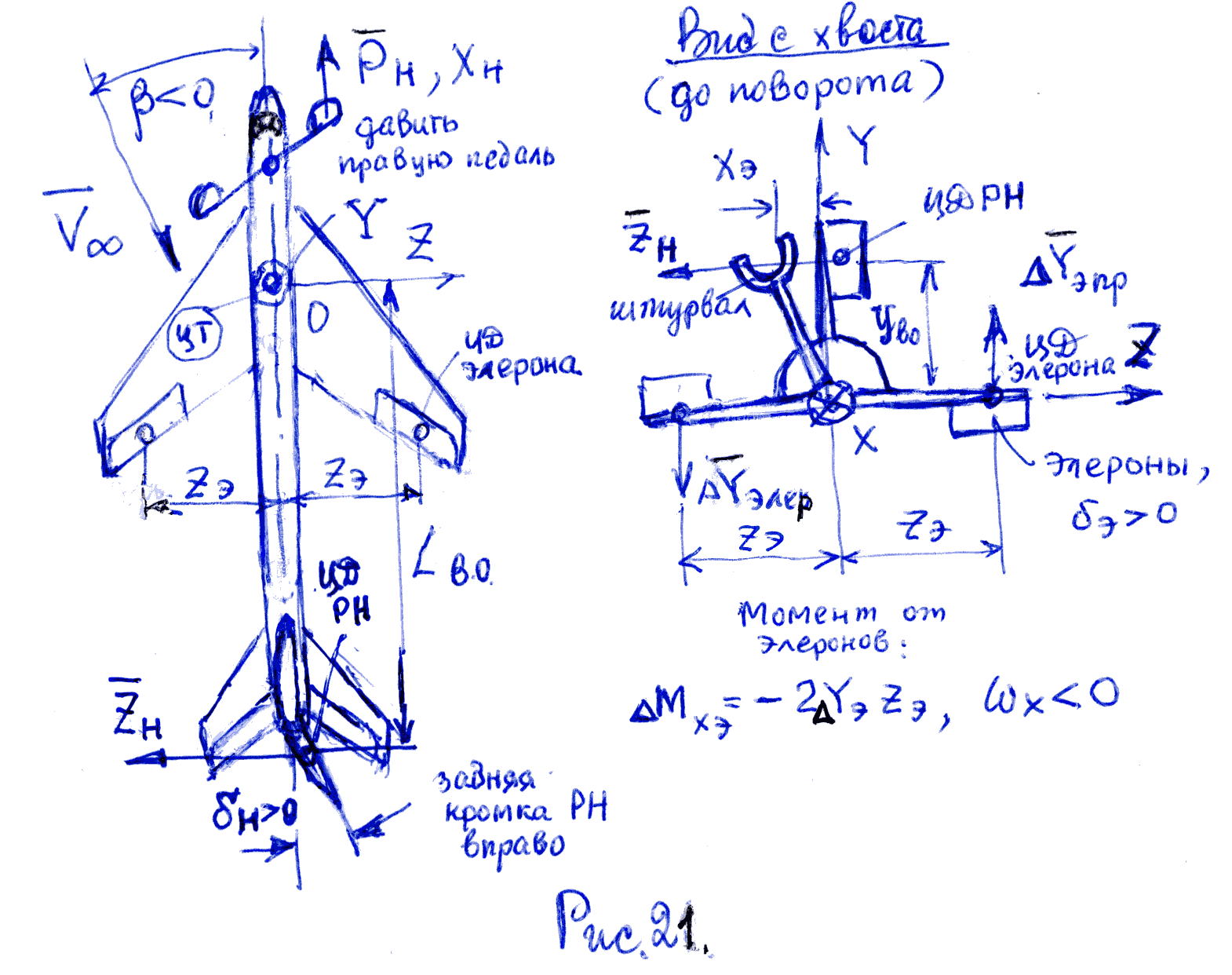
Прирост и уменьшение пропорциональны
коэффициенту эффективности элеронов
-
и величине их отклонения
.
При отклонении руля направления вправо
(правая педаль - вперед). На вертикальном
оперении (ВО) также происходит
перераспределение давлений воздушного
потока и возникает дополнительная
поперечная сила
![]() ,
которая создает на плече
,
которая создает на плече
![]() момент
относительно ОХ
момент
относительно ОХ
![]() и одновременно та же сила
создает момент относительно OY
на плече
и одновременно та же сила
создает момент относительно OY
на плече
![]() (который обычно в 5÷10раз больше
(который обычно в 5÷10раз больше
![]() )
)
![]()
Частная производная
![]() -
называется коэффициентом эффективности
руля направления. Обычно
момент относительно OY в
5÷10 раз больше чем момент относительно
ОХ. При отклонении РН (т.к.
>>
)
повернуть ВС относительно OY
легче чем относительно OX
(инерционные свойства ВС:
-
называется коэффициентом эффективности
руля направления. Обычно
момент относительно OY в
5÷10 раз больше чем момент относительно
ОХ. При отклонении РН (т.к.
>>
)
повернуть ВС относительно OY
легче чем относительно OX
(инерционные свойства ВС:
![]() сопротивление к повороту крыльев и ГО
больше чем ВО) При совместном управлении
элеронами и рулем направления ВС, слегка
качнувшись влево, начинает разворачиваться
левым полукрылом вперед, т.е. создается
сопротивление к повороту крыльев и ГО
больше чем ВО) При совместном управлении
элеронами и рулем направления ВС, слегка
качнувшись влево, начинает разворачиваться
левым полукрылом вперед, т.е. создается
![]() .
на левом полукрыле возникает большая
подъемная сила, чем на правом и ВС
развивает положительную
.
на левом полукрыле возникает большая
подъемная сила, чем на правом и ВС
развивает положительную
![]() и положительный крен, который по отношению
к моменту от элеронов будет «тормозящим»
вращение.
и положительный крен, который по отношению
к моменту от элеронов будет «тормозящим»
вращение.
Момент рыскания:
![]() существенно зависит от угла атаки
(см. рис. 22.)
существенно зависит от угла атаки
(см. рис. 22.)
и при
![]() на
малых углах
,
чаще всего
на
малых углах
,
чаще всего
![]() и
и
![]() ,
т.е. развивается
,
т.е. развивается
![]() и положительное скольжение
,
которое в итоге приведет к созданию
«подкручивающего момента».
Аналогично можно показать, что при
и положительное скольжение
,
которое в итоге приведет к созданию
«подкручивающего момента».
Аналогично можно показать, что при
![]() -
моменты развиваются
-
моменты развиваются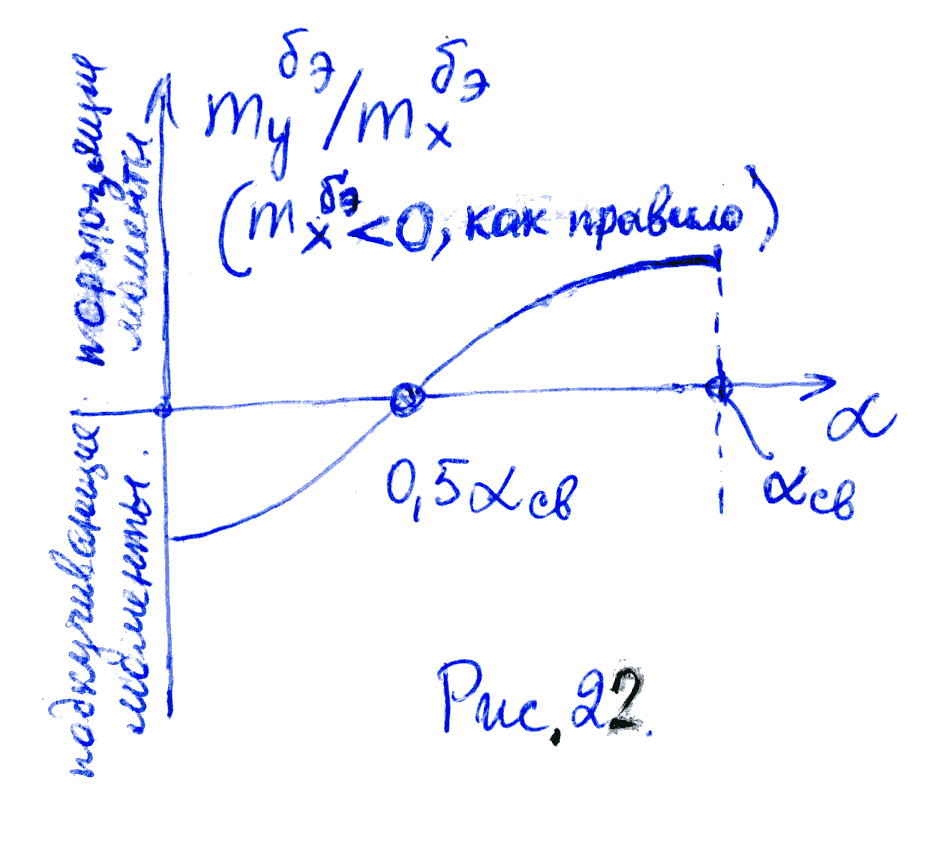
«тормозящие» (по отношению к исходным от отклонения элеронов). В зависимости от соотношения исходных моментов и «тормозящих» возможны случаи «обращения» управления.
Моменты
![]() являются демпфирующими, в линейном
диапазоне изменения
являются демпфирующими, в линейном
диапазоне изменения
![]() .Рассмотрим
физическую природу этих моментов с
помощью рис.23.
.Рассмотрим
физическую природу этих моментов с
помощью рис.23.
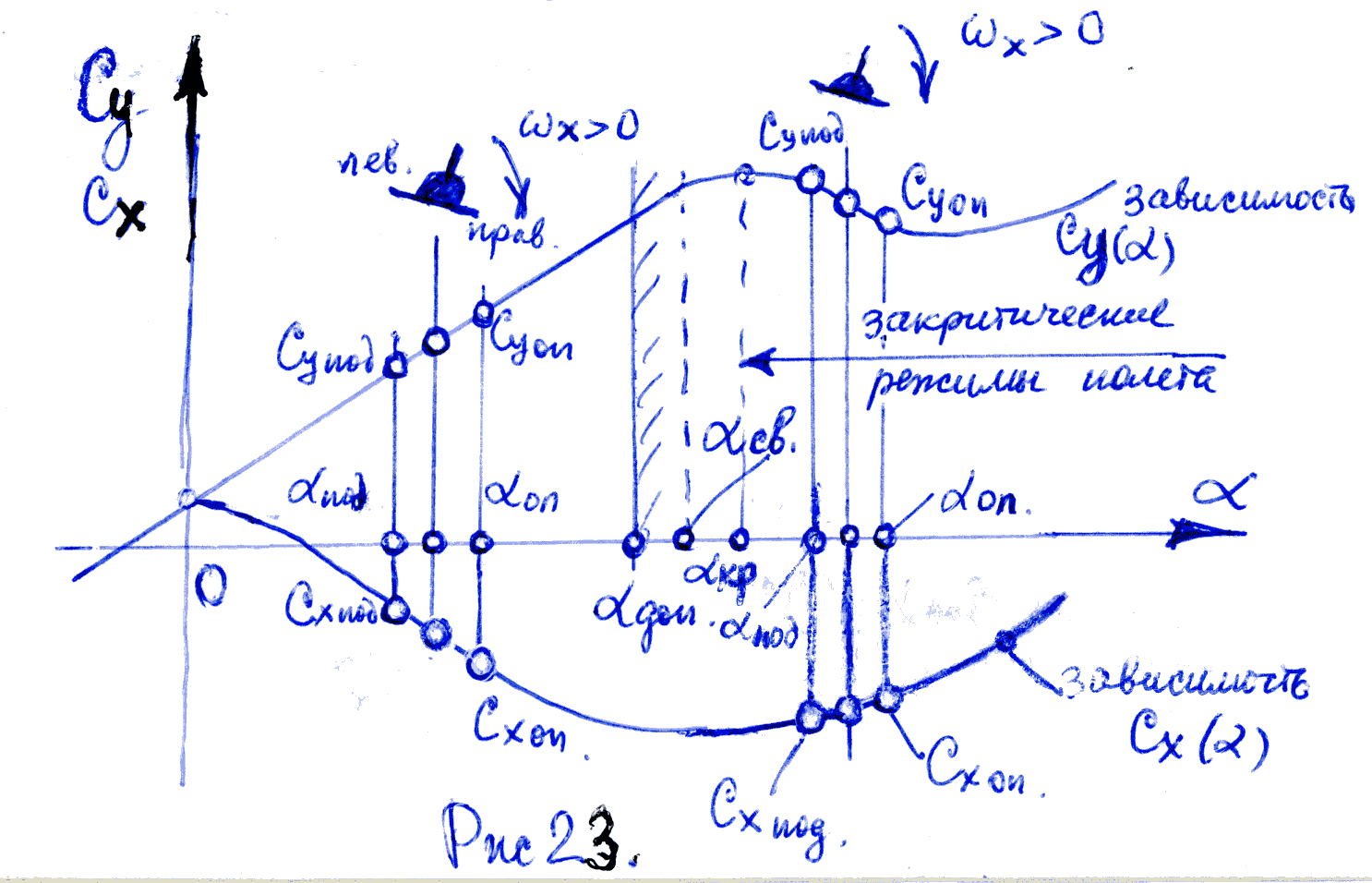
Пусть
и на опускающееся правое полукрыло
набегает дополнительный воздушный
поток, зависящий от величины
![]() и расстояния z от OX.
На опускающемся полукрыле всегда угол
атаки
и расстояния z от OX.
На опускающемся полукрыле всегда угол
атаки
![]() и при
и при
![]() ,
что в результате приводит к дополнительному
моменту (обусловленному
),
направленному в противоположную сторону
вращения, тормозящему вращение, поэтому
называется демпфирующим. При
некоторых
обычно их закритических углах атаки
(режимах полета) может оказаться, что
,
что в результате приводит к дополнительному
моменту (обусловленному
),
направленному в противоположную сторону
вращения, тормозящему вращение, поэтому
называется демпфирующим. При
некоторых
обычно их закритических углах атаки
(режимах полета) может оказаться, что
![]() и появляется момент
и появляется момент![]() ,
подкручивающий вращение (направлен в
ту же сторону). Этот момент называют
авторотирующим. При одном и том же
исходном угле атаки,
является функцией Z и
,
подкручивающий вращение (направлен в
ту же сторону). Этот момент называют
авторотирующим. При одном и том же
исходном угле атаки,
является функцией Z и
![]() ,
т.е.
,
т.е.
![]() ,
если принять
,
если принять
![]() по размаху полукрыла, то
по размаху полукрыла, то
![]() .
Чем больше
тем больше
.
Чем больше
тем больше
![]() и возможно изменение авторотирующих
моментов на демпфирующие. Все зависит
от соотношения
и возможно изменение авторотирующих
моментов на демпфирующие. Все зависит
от соотношения
![]() и
и![]()
При варьировании
![]() изменяются соотношения
изменяются соотношения
![]() и
и![]() .Нормальная
сила
.Нормальная
сила
![]() (направленная по ОХ, т.к
<0,
на рис.23) будет больше по модулю чем
(направленная по ОХ, т.к
<0,
на рис.23) будет больше по модулю чем
![]() .
(рис.24а)).
.
(рис.24а)).
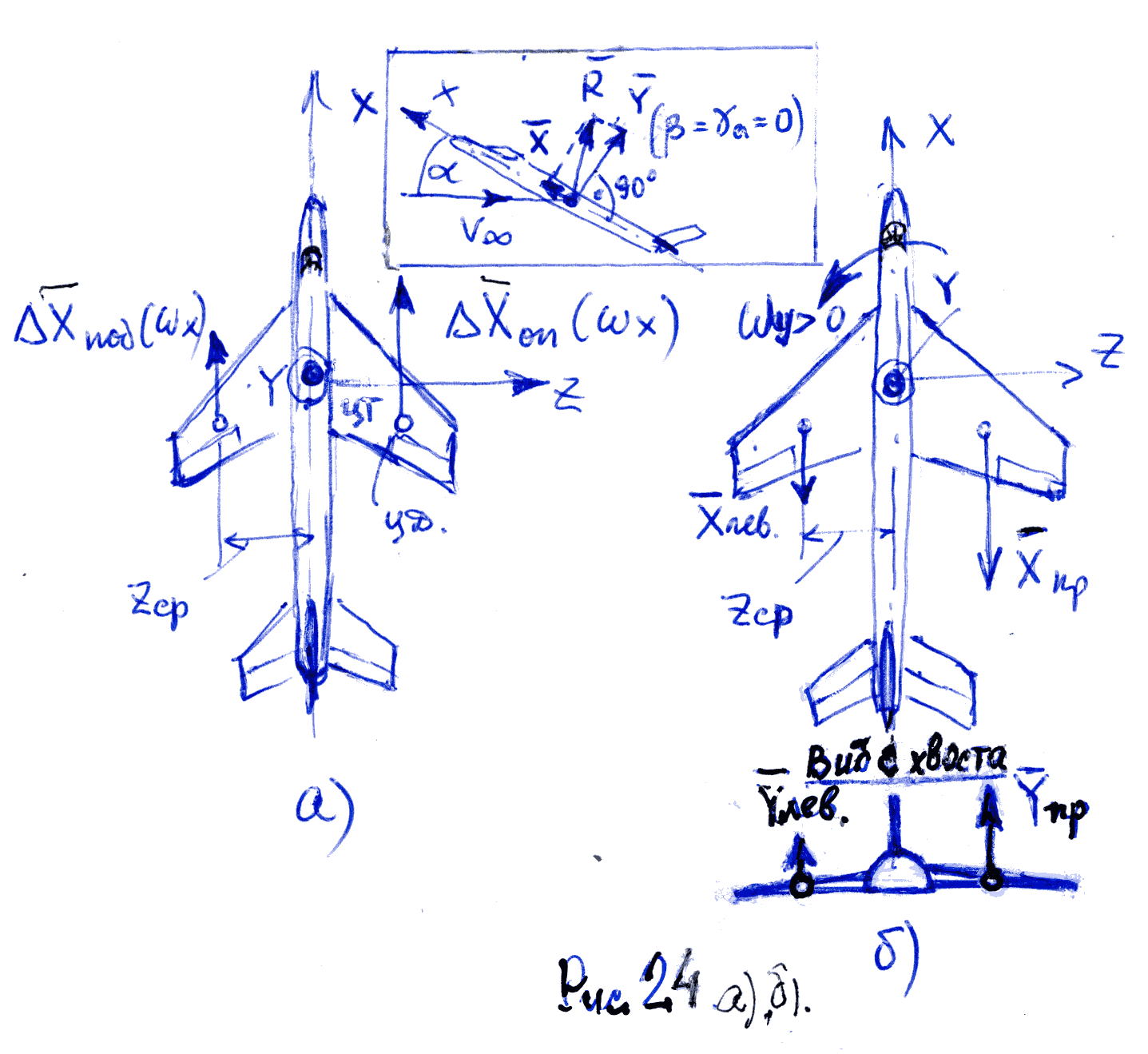
Разность этих сил создает момент
относительно OY:
![]() ,
который называется спиральным или
перекрестным моментом рыскания.
,
который называется спиральным или
перекрестным моментом рыскания.
При вращении ВС относительно OY
с угловой скоростью
![]() ,
правое полукрыло имеет большую скорость,
а левое – меньшую скорость по отношению
к скорости полета и
,
правое полукрыло имеет большую скорость,
а левое – меньшую скорость по отношению
к скорости полета и
![]() и, например, для малых
и, например, для малых
![]() изображены на рис.24б). Разность этих сил
создает момент
изображены на рис.24б). Разность этих сил
создает момент
![]() ,препятствующий
(тормозящий) вращение относительно OY
и поэтому называется демпфирующим.
Пара разностей сил
,препятствующий
(тормозящий) вращение относительно OY
и поэтому называется демпфирующим.
Пара разностей сил
![]() по отношению к
по отношению к
![]() создают спиральный момент крена
создают спиральный момент крена
![]() .
.