

2.6.2. Балансировка вс в установившемся горизонтальном полете
Определим угол
(или
![]() ),
перемещение
),
перемещение
![]() ,
потребные для балансировки ВС в
установившемся (V=const)
горизонтальном полете (Н=const,
,
потребные для балансировки ВС в
установившемся (V=const)
горизонтальном полете (Н=const,
![]() =0)
полете. Приравнивая нулю (2.24) при
=0)
полете. Приравнивая нулю (2.24) при
![]() ,
получим при
,
получим при
![]()
![]() , (2.36)
, (2.36)
где
![]() при
при
![]() .
(см. рис. 16)
.
(см. рис. 16)
![]() (примем постоянной, не зависящей от
изменения
).
(примем постоянной, не зависящей от
изменения
).
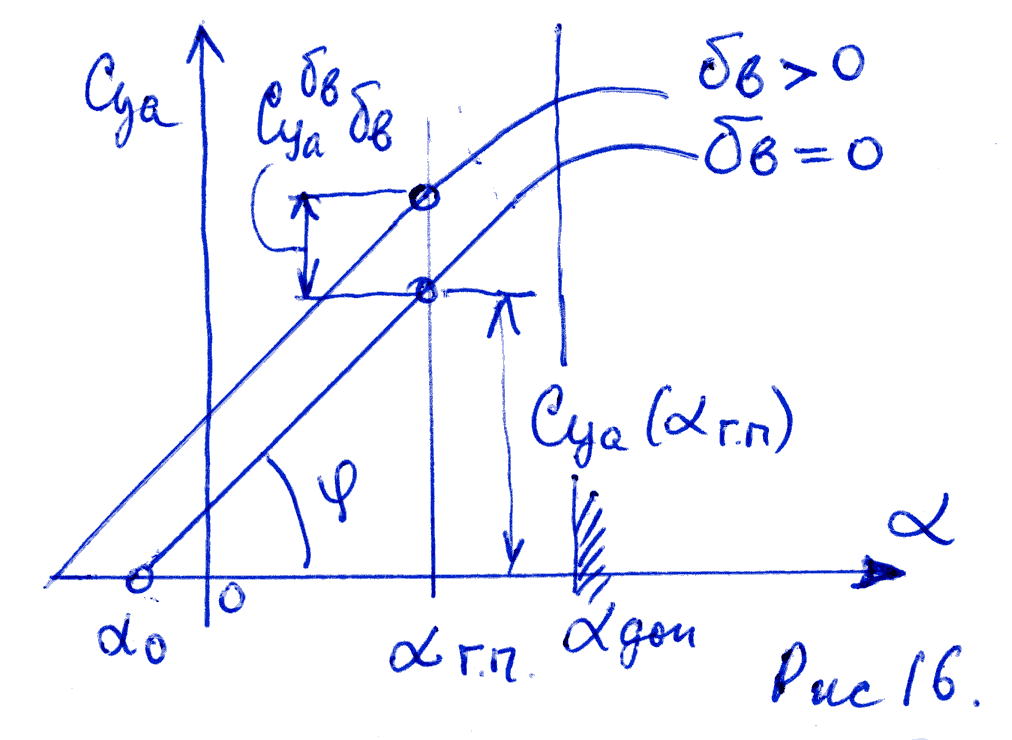
Аналогичная зависимость имеет место
при изменении
![]() .
Полный коэффициент
.
Полный коэффициент
![]() с учетом изменений
и
будет
с учетом изменений
и
будет
![]() .
(2.37) Принимая
во внимание (2.11) и (2.12)
.
(2.37) Принимая
во внимание (2.11) и (2.12)
![]() .
(2.38)
.
(2.38)
С учетом этих соотношений, а также выражения (2.37), получаем
![]() ,
(2.39)
,
(2.39)
где
![]() коэффициенты эффективности стабилизатора
и руля высоты определяются при постоянном
значении
коэффициенты эффективности стабилизатора
и руля высоты определяются при постоянном
значении
![]() по формулам
по формулам
![]() (2.40)
(2.40)
Из (2.39), принимая приближенно
![]() ;
определим балансировочное отклонение
руля высоты
;
определим балансировочное отклонение
руля высоты
![]()
![]() (2.41)
(2.41)
а потребное балансировочное отклонение
штурвала, учитывая, что
![]() ,
,
![]() (2.42)
(2.42)
Типовые балансировочные зависимости (кривые, диаграммы) приведены на рис.17.
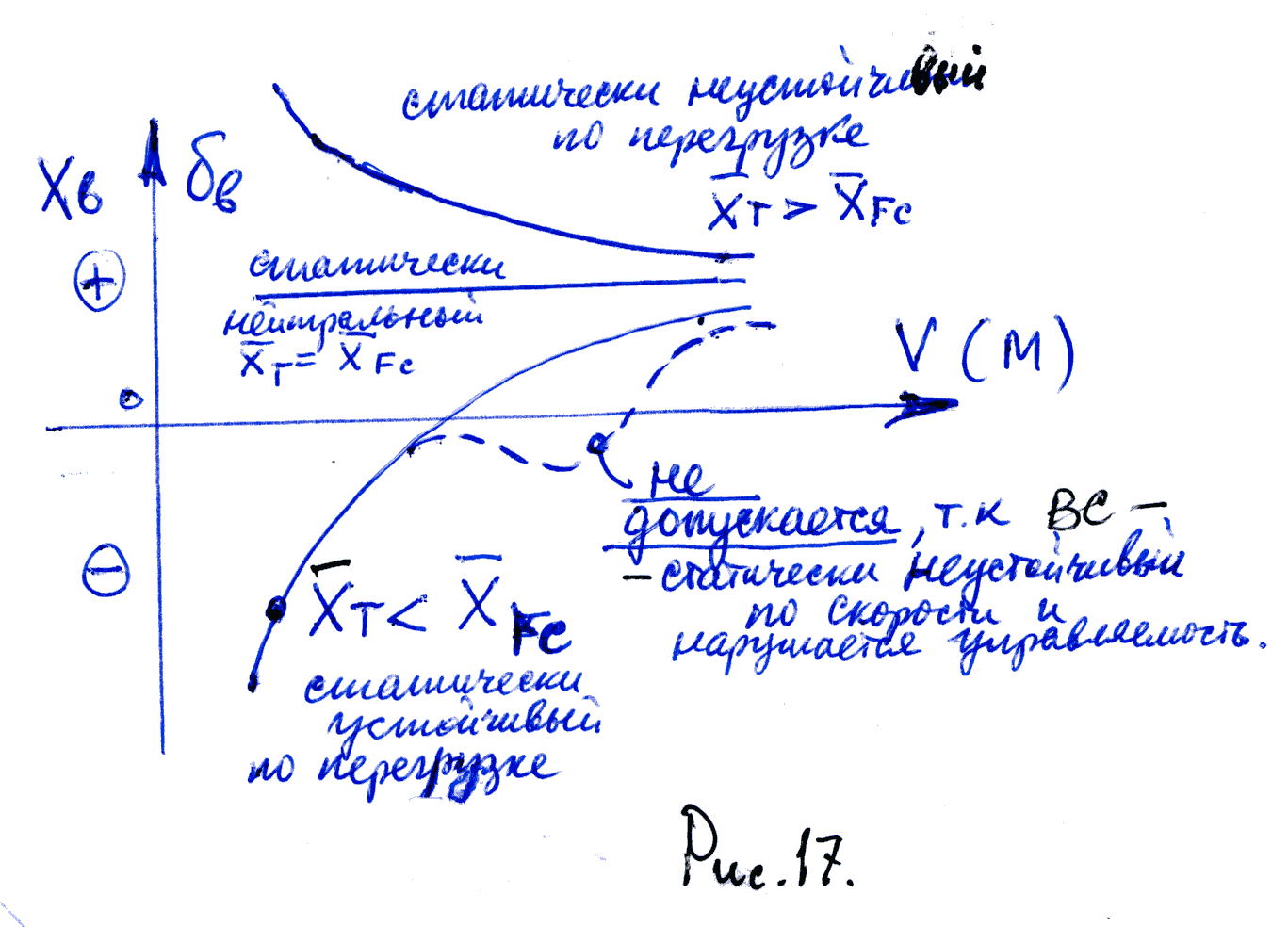
Кроме приведенных характеристик, на
управляемость ВС большое влияние
оказывают производные![]() Их значения должны отвечать естественным
рефлексам пилота и обращение управления
(на рис. 17 обозначено пунктиром) не
допускается.
Их значения должны отвечать естественным
рефлексам пилота и обращение управления
(на рис. 17 обозначено пунктиром) не
допускается.
2.6.3. Балансировка вс в установившемся криволинейном движении в вертикальной плоскости
В отличие
от режима горизонтального полета (см.
раздел 2.5, когда принимались:
![]() )
в установившемся криволинейном движении
(в окрестности некоторого режима
горизонтального полета)
)
в установившемся криволинейном движении
(в окрестности некоторого режима
горизонтального полета)
![]() и с учетом (2.25), (2.26) его можно представить
в виде
и с учетом (2.25), (2.26) его можно представить
в виде
![]() (2.43)
(2.43)
где с учетом (2.37), (2.38)
![]()
Выразим в зависимости от . для этой цели воспользуемся приближенными соотношениями
![]()
и соответственно приращение можно выразить как функцию приращения
 ,
,
откуда
![]() .
(2.44)
.
(2.44)
Подставляя выражение для
![]() в (2.43), получим условие балансировки (
в (2.43), получим условие балансировки (![]() )
в криволинейном движении с
)
в криволинейном движении с
![]() и
изменением перегрузки на величину
и
изменением перегрузки на величину
![]() (при малом изменении от режима
горизонтального полета)
(при малом изменении от режима
горизонтального полета)
![]() (2.45)
(2.45)
где определяются соотношениями (2.40).
Из этого уравнения определим балансировочное
значения угла отклонения руля высоты,
потребное для криволинейного полета с
,
в малой окрестности заданного опорного
режима горизонтального полета (![]() )
)
![]() (2.46)
(2.46)
Дифференцируя по (учитывая, что ≈ -1), получаем
![]() (2.47)
(2.47)
Тогда (2.46) можно представить в виде
![]() ,
(2.48)
,
(2.48)
где
![]() определяются по (2.41).
определяются по (2.41).
Потребные для балансировки отклонения штурвала (ручки) управления рулем высоты в установившемся криволинейном полете определяется из (2.42), принимая во внимание (2.48)
![]() (2.49)
(2.49)
где
![]()
![]() . (2.50)
. (2.50)
Заметим, что в случае использования
автомата продольного управления вместо
следует использовать
![]() -
степень статической устойчивости по
перегрузке при фиксированном штурвале.
-
степень статической устойчивости по
перегрузке при фиксированном штурвале.
Производная
![]() -
называется коэффициентом расхода
штурвала на перегрузку (фактически,
для изменения перегрузки
на единицу) при
-
называется коэффициентом расхода
штурвала на перегрузку (фактически,
для изменения перегрузки
на единицу) при
![]() ,
,
![]() и
фиксированном руле высоты (фиксированном
рычаге управления, если вместо
использовать
).
и
фиксированном руле высоты (фиксированном
рычаге управления, если вместо
использовать
).
Усилие на штурвале для балансировки в криволинейном полете аналогично можно представить в виде
![]() ,
(2.51)
,
(2.51)
где
![]() -
приращение усилия на штурвале по
сравнению с потребным для горизонтального
полета
-
приращение усилия на штурвале по
сравнению с потребным для горизонтального
полета
![]() (2.35). Для ВС с НБУ выражение (2.51) чаще
представляют в другой форме
(2.35). Для ВС с НБУ выражение (2.51) чаще
представляют в другой форме
![]() (2.52)
(2.52)
где
![]() -
называется коэффициентом расхода
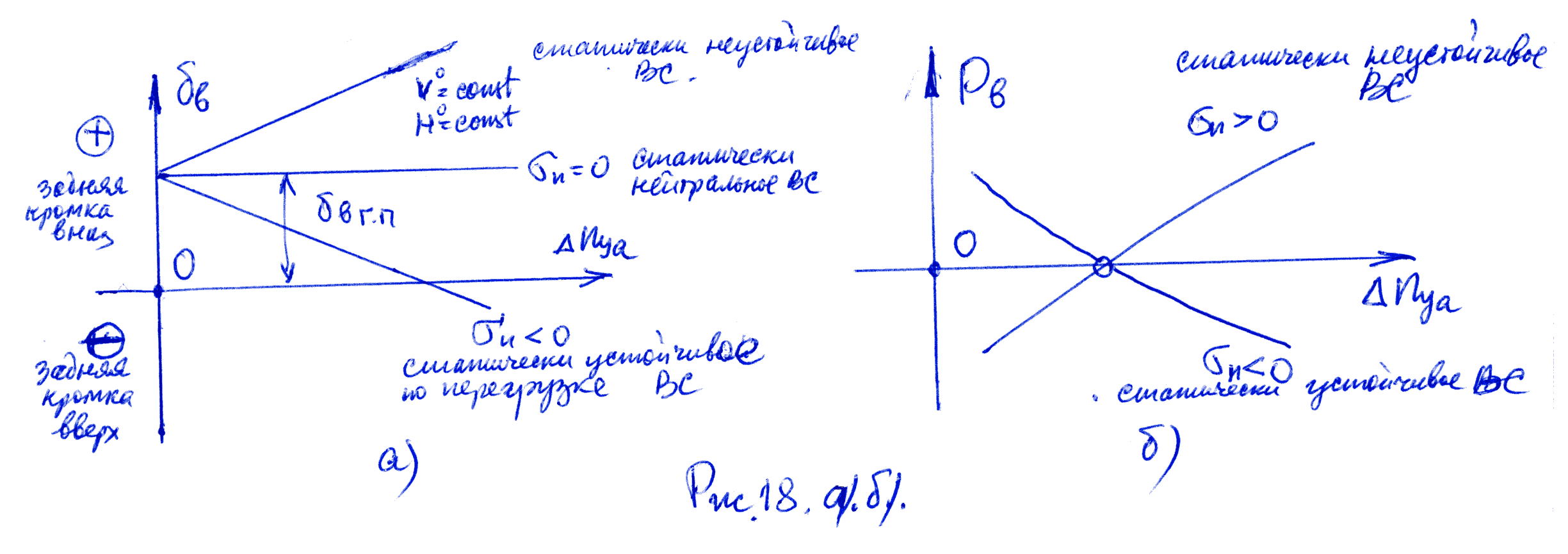
усилий на перегрузку. Типовые
балансировочные кривые
-
называется коэффициентом расхода
усилий на перегрузку. Типовые
балансировочные кривые
![]() ,
,
![]() представлены на рис. 18.
представлены на рис. 18.
АП-25.
(А). На режимах полета и конфигурациях
ВС, рекомендованных руководством по
летной эксплуатации (РЛЭ), в диапазоне
перегрузок
![]() до
до
![]() ,
установленных РЛЭ, и балансировке по
условиям в установившемся прямолинейном
полете, производные
,
установленных РЛЭ, и балансировке по
условиям в установившемся прямолинейном
полете, производные
![]() должны быть отрицательными и по абсолютной
величине
должны быть отрицательными и по абсолютной
величине
![]() рекомендуется
не менее 10 кгс,
рекомендуется
не менее 10 кгс,
![]() -
не менее 5 см. Усилия на штурвале, потребные
для создания
-
не менее 5 см. Усилия на штурвале, потребные
для создания
![]() до срабатывания сигнализации о приближении
к сваливанию в конфигурации, рекомендованный
РЛЭ для полета по маршруту, при балансировке
ВС по усилию в исходном режиме
прямолинейного полета, рекомендуется
по абсолютной величине не менее 25 кГс.
до срабатывания сигнализации о приближении
к сваливанию в конфигурации, рекомендованный
РЛЭ для полета по маршруту, при балансировке
ВС по усилию в исходном режиме
прямолинейного полета, рекомендуется
по абсолютной величине не менее 25 кГс.
(В) На режимах
полета и при конфигурациях ВС,
рекомендованных РЛЭ, при балансировке
ВС по усилиям в исходном режиме
прямолинейного полета, производные
должны быть отрицательными до перегрузки
.
При дальнейшем уменьшении перегрузки
до
![]() или до достижения
или до достижения
![]() ,
установленной РЛЭ, если
,
установленной РЛЭ, если
![]() ,
либо до перегрузке, соответствующей
полному отклонению штурвала «от себя»,
допускается изменение знака производных
.
В этих случаях уменьшение усилий на
штурвале не должно превышать 30% от их
максимальной величины. На минимальной
достигнутой перегрузке усилия
в продольном
управлении должны превышать усилия
трения в системе продольного управления
не менее, чем в три раза.
,
либо до перегрузке, соответствующей
полному отклонению штурвала «от себя»,
допускается изменение знака производных
.
В этих случаях уменьшение усилий на
штурвале не должно превышать 30% от их
максимальной величины. На минимальной
достигнутой перегрузке усилия
в продольном
управлении должны превышать усилия
трения в системе продольного управления
не менее, чем в три раза.
(С). Перекрестные связи не должны вносить (по оценке пилота) особенностей, затрудняющих пилотирование.