

2.6.1. Усилие на штурвале
Пусть на руль высоты действуют аэродинамические силы,
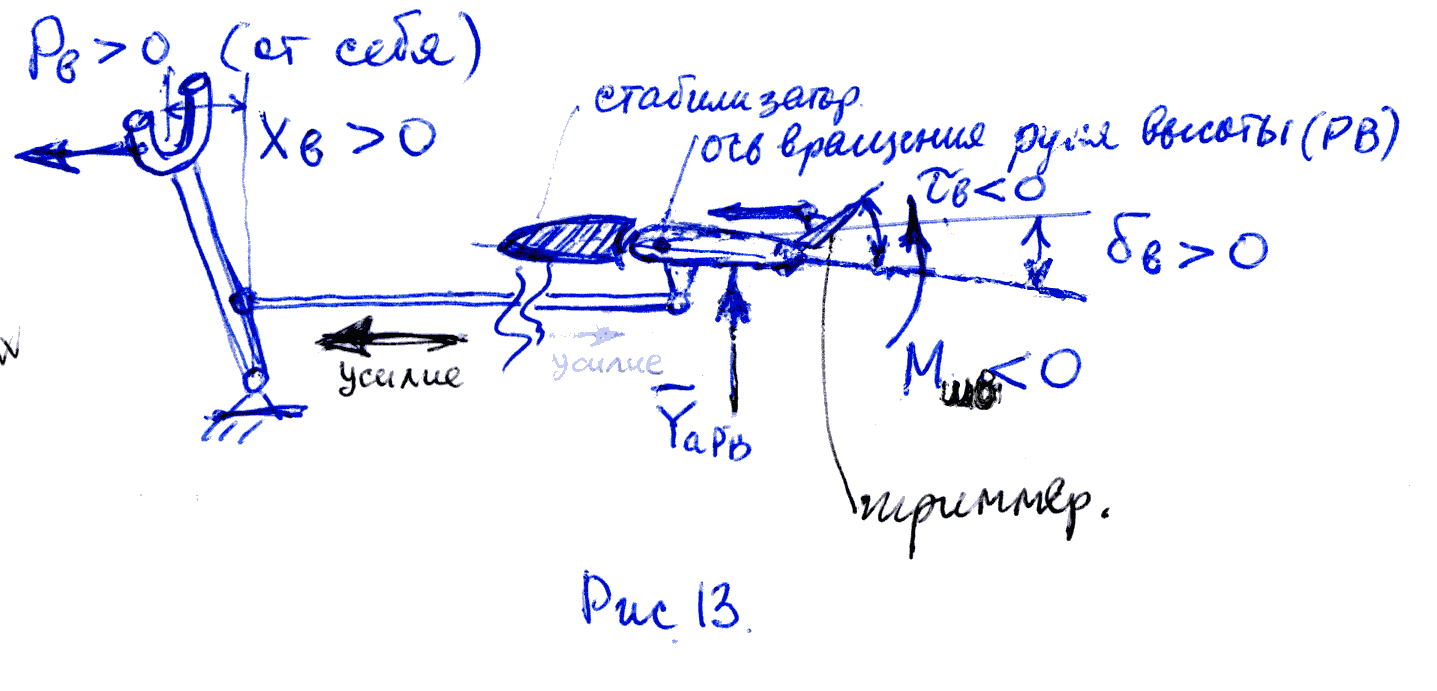
которые создают момент относительно оси вращения, называемый шарнирным моментом.
![]() (2.31)
(2.31)
где
![]() -
коэффициент шарнирного момента,
-
коэффициент шарнирного момента,
![]() -
соответственно площадь и САХ органа
управления (руля),
-
соответственно площадь и САХ органа
управления (руля),
![]() -
коэффициент торможения потока в области
оперения. Этот момент должен быть,
компенсирован пилотом бустером или
автоматическим устройством, улучшающим
устойчивость и управляемость.
-
коэффициент торможения потока в области
оперения. Этот момент должен быть,
компенсирован пилотом бустером или
автоматическим устройством, улучшающим
устойчивость и управляемость.
Пренебрегая потерями на трение в системе управления на основе «принципа возможных перемещений» (или элементарной работе сил и моментов) имеем
![]() .
(2.32)
.
(2.32)
Откуда
![]() (2.33)
(2.33)
где
![]() -
линейное перемещение верхней части
штурвала (ручки),
-
линейное перемещение верхней части
штурвала (ручки),
![]() -
передаточный коэффициент в системе
продольного управления (обычно
-
передаточный коэффициент в системе
продольного управления (обычно
![]() ).
Полагая, что коэффициент шарнирного
момента руля высоты
).
Полагая, что коэффициент шарнирного
момента руля высоты
![]() зависит
линейно от
зависит
линейно от
![]() и
(если имеется триммер; обычно при
и
(если имеется триммер; обычно при
![]() угол отклонения триммера
угол отклонения триммера
![]() ,
заданная кромка отклоняется вверх)
,
заданная кромка отклоняется вверх)
![]() ,
то
,
то
![]() .
(2.34)
.
(2.34)
После подстановки этого соотношения в (2.33) с учетом (2.31), получаем
![]() (2.35)
(2.35)
Как видно, величина
![]() зависит от геометрических размеров
руля высоты, скоростного напора q,
а также отклонения триммера
.
В установившемся полете, подбирая
значение
можно
снять усилия на штурвале (
=0).
зависит от геометрических размеров
руля высоты, скоростного напора q,
а также отклонения триммера
.
В установившемся полете, подбирая
значение
можно
снять усилия на штурвале (
=0).
Режим полета с нулевым усилием на штурвале, т.е. на котором для балансировки ВС не требуется прикладывать усилия к штурвалу, называется балансировочным при свободном штурвале.
Для уменьшения усилий на штурвале и создания потребных значений (в соответствии с АП-25, АП-23) применяют бустеры и системы управления различают с обратимым (ОБУ) и необратимым (НБУ) бустерным управлением. При НБУ шарнирный момент не ощущается пилотом и полностью передается на конструкцию ВС через опору бустера. В этом случае, чтобы сохранить «естественность» управления ВС (см. рис. 14) при увеличении и уменьшении скорости от балансировочной, должно сохраняться правило отклонения штурвала.

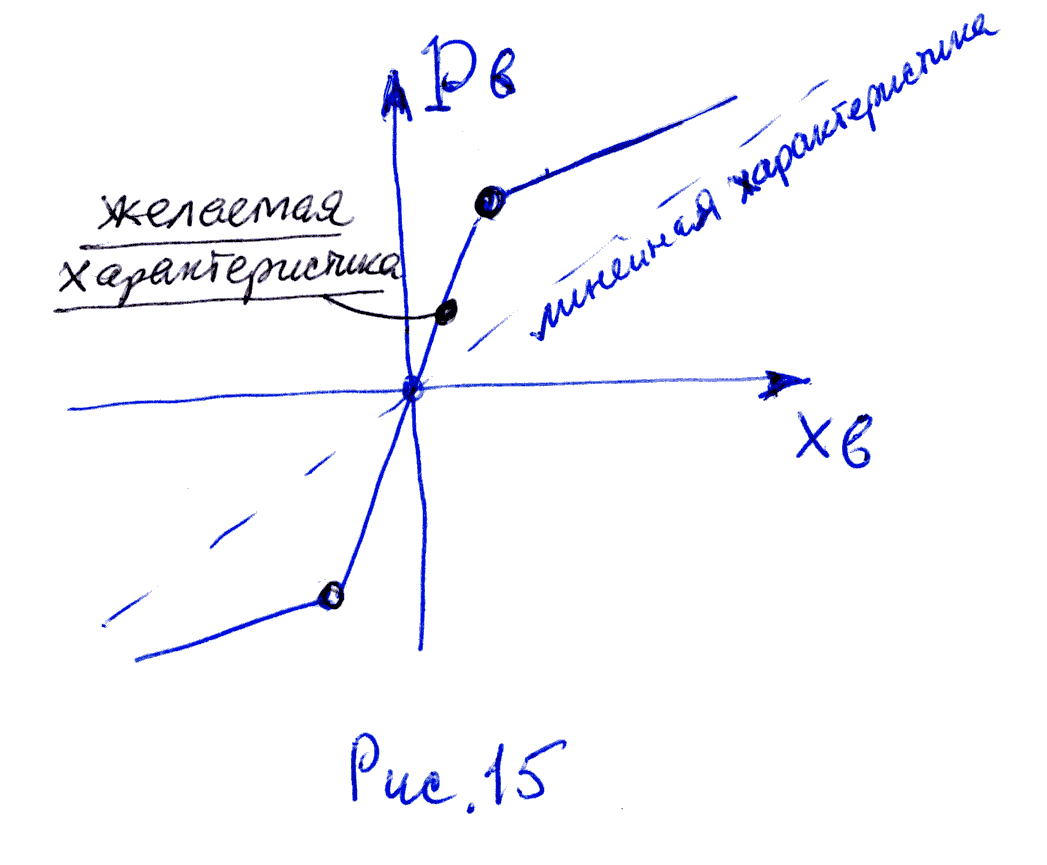
При НБУ и линейной характеристике загрузочного механизма усилие на штурвале управления равно
![]() ,
,
где
![]() -
характеристика жесткости загрузочного
механизма. С целью улучшения управляемости
используют нелинейную характеристику
загрузочного механизма (с «изло-
мом»), чтобы усилия были побольше при
малых потребных перемещениях штурвала
и поменьше - при больших
-
характеристика жесткости загрузочного
механизма. С целью улучшения управляемости
используют нелинейную характеристику
загрузочного механизма (с «изло-
мом»), чтобы усилия были побольше при
малых потребных перемещениях штурвала
и поменьше - при больших
![]() .
В противном случае при малых
и малых Рв и небольших ошибках
пилотирования может произойти значительное
увеличение нормальной перегрузки, а
при больших
пилоту придется прикладывать слишком
большие усилия для управления.
.
В противном случае при малых
и малых Рв и небольших ошибках
пилотирования может произойти значительное
увеличение нормальной перегрузки, а
при больших
пилоту придется прикладывать слишком
большие усилия для управления.