6.3Передаточные функции в боковом возмущенном движении
Изолированное движение рыскания. Из системы (6.12) после преобразования Лапласа получаем
 ;
(6.20)
;
(6.20)
где:![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
hδ – декремент затухания углового движения в боковой плоскости;
ωδ – частота недемпфированных колебаний в боковом движении.
 .
(6.21)
.
(6.21)
Изолированное движение крена
В уравнениях (6.12) пренебрегаем составляющими
![]() и
и
![]() и после преобразования Лапласа получаем
и после преобразования Лапласа получаем
![]() ;
(6.22)
;
(6.22)
где:![]() ;
; ;
;
![]() .
(6.23)
.
(6.23)
Из первого уравнения системы (6.1),
предполагая
![]() (угол
(угол
![]() «установился»),
«установился»),
![]() при
при
малых и после преобразования Лапласа
![]() .
(6.24)
.
(6.24)
Здесь
![]() ,
(см.(5.37));
,
(см.(5.37));![]()
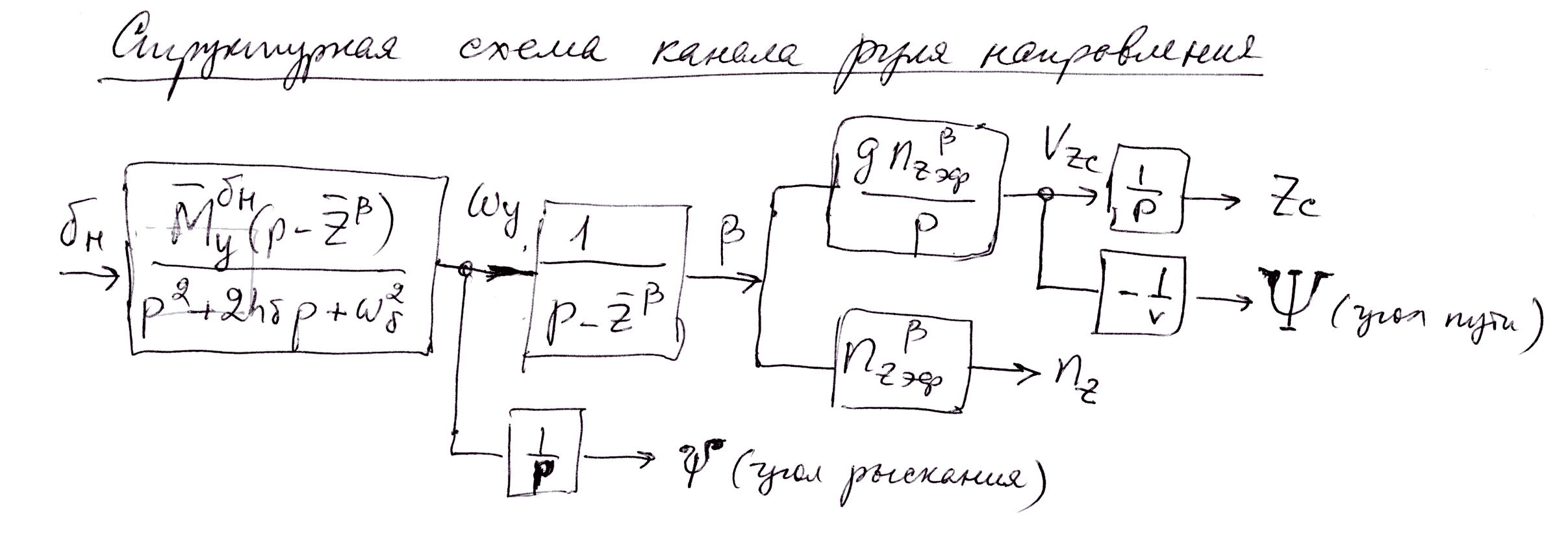
Траекторное движение центра масс
ВС. Будем предполагать, что ВС
сбалансировано по моментам
![]() откуда
откуда

Примем, что:
![]()
где
 (6.25)
(6.25)
Рассмотрим уравнение для
![]() системы
(6.1)
системы
(6.1)
![]()
Здесь выражение в скобках соответствует
приближенно углу пути
![]() ,
т.е. можно записать
,
т.е. можно записать
![]()
Продифференцируем это уравнение по времени
![]()
где приближенно
![]() и соответствующая система уравнений
возмущенного траекторного движения
может быть представлена в следующем
виде
и соответствующая система уравнений
возмущенного траекторного движения
может быть представлена в следующем
виде
![]()
![]() (6.26)
(6.26)
После преобразования Лапласа, определяются передаточные функции:
![]() ;
;
![]() (6.27)
(6.27)
Рассмотрим основные передаточные функции в боковом возмущенном движении во взаимосвязи между собой

6.4. Анализ переходных процессов в боковом возмущенном движении.
6.4.1. Реакция ВС на отклонение элеронов
Для определения характеристик переходного процесса необходимо рассмотреть переда-
точную функцию
![]() более общего вида, чем ранее. С этой
целью в уравнении
более общего вида, чем ранее. С этой
целью в уравнении
(см. систему (4.6)) для
![]() учитывается
составляющая
учитывается
составляющая
![]() ,
и в итоге получаем
,
и в итоге получаем
 (6.28)
(6.28)
где .
.
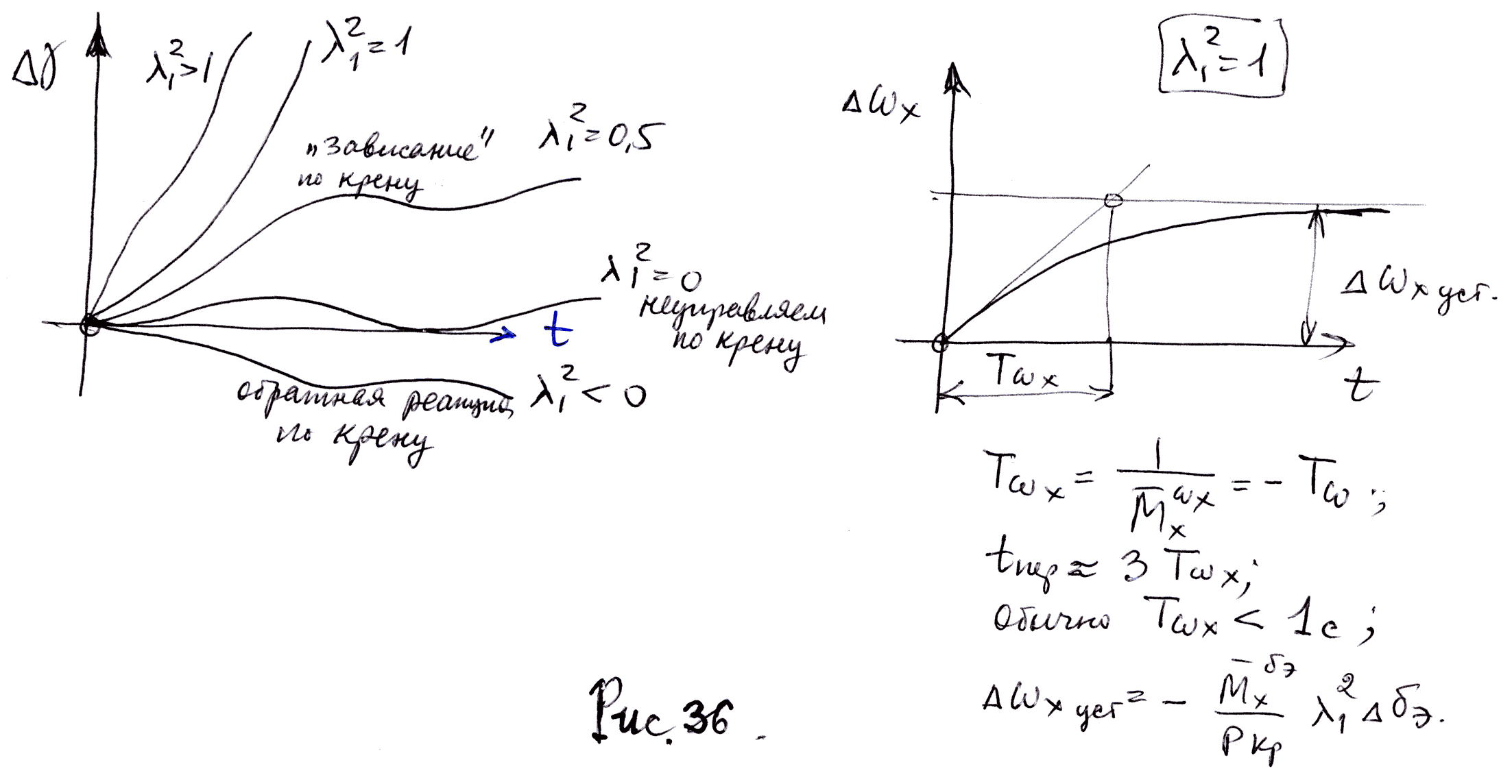
Характер переходных процессов по![]() определяется параметром
определяется параметром
![]()

![]() (6.29)
(6.29)
и при
![]() (
(![]() )
переходный процесс
)
переходный процесс
![]() имеет апериодический характер.
имеет апериодический характер.
В этом случае передаточная функция
принимает вид (6.23) На рис. 36 представлены
переходные процессы по углу крена при
различных значениях
![]() и
и
![]()