

Федеральное агентство по образованию Российской Федерации
Московский авиационный институт
(государственный технический университет)
__________________________________________________________________
кафедра 106
Леонов В.А.
Конспект лекций по дисциплине
«Устойчивость и управляемость транспортных воздушных судов»
(специальность 13.01.09)
Объем 16 лекций
Москва. 2008
Аннотация.
Конспект лекций написан на основе курса лекций, прочитанного студентам специальности 13.01.09. В курсе в основном рассматривается класс транспортных самолетов, которые будем называть «воздушными судами» (ВС) с дозвуковыми скоростями полета нормальной схемы. Предполагается, что на таких ВС установлена необратимая бустерная система управления (НБУ).
Основные определения и понятия устойчивости и управляемости используются для ВС, как жесткого тела без учета упругих колебаний крыла, фюзеляжа и других элементов конструкции.
Дается подробный анализ и исследование продольного движения ВС с выводом выражений для аэродинамических сил и моментов, балансировки, показателей устойчивости и управляемости, диапазона допустимых центровок. Приводится алгоритм выбора параметров горизонтального оперения. Для бокового движения принята та же схема изучения теоретического материала, но в упрощенном варианте без подробного вывода расчетных формул, с акцентом на особенности бокового движения, физические причины взаимосвязи «каналов» крена и рыскания.
Изучается динамика возмущенного движения с применением различных методов исследования. Устойчивость движения рассматривается с использованием теорем
А.М. Ляпунова об устойчивости по первому приближению. Характеристики управляемого движения ВС изучаются с помощью передаточных функций и частотных методов. Анализируется раздельно продольное и боковое возмущенные движения. Показывается особенность динамики пространственного движения, авторотации, режимов сваливания и штопора.
Рассматриваются: структура современной системы управления ВС, вопросы улучшения пилотажных характеристик и автоматического управления. Приведен обзор основных требований к летно-техническим и пилотажным характеристикам ВС.
Содержание
1. (Лекция1)Введение. Устойчивость и управляемость движения. Общие понятия………………………………………………………………………………………….. 3 1.1. Виды устойчивости движения……………………………………………………………. . 5
1.2. Управляемость движения………………………………………………………………….7
2. (Лекция 2) Моменты, действующие на ВС в полете……………………………………...8
2.1. Аэродинамический момент тангажа в установившемся прямолинейном полете……..9
2.2. Момент тангажа от тяги двигателей……………………………………………………. .12
2.3. (Лекция 3)Дополнительные моменты тангажа в криволинейном неустановившемся полете…………………………………………………………………………………………… . 13
2.4. Результирующий момент тангажа в криволинейном неустановившемся полете……..15
2.5. Продольная статическая устойчивость при фиксированном руле высоты……………16
2.6. (Лекция 4)Балансировка ВС и характеристики статической управляемости в продольном движении…………………………………………………………………………...20
2.6.1. Усилия на штурвале……………………………………………………………………21
2.6.2. Балансировка ВС в установившемся горизонтальном полете………………………22
2.6.3. Балансировка ВС в установившемся криволинейном полете в вертикальной плоскости …………………………………………………………………………………………23
2.6.4. Особенности продольной балансировки при взлете и посадке……………………. 25
2.6.5. Диапазон допустимых центровок и требования к выбору параметров горизонтального оперения……………………………………………………………………….26
3.(Лекция 5) Боковое движение.................................................................................................28
3.1. Аэродинамические моменты крена и рыскания………………………………………. . 28
3.2. Статическая устойчивость в боковом движении………………………………………..32
3.3. Балансировка ВС в установившемся боковом движении. Характеристики
поперечной и путевой статической управляемости…………………………………………….33
3.3.1. (Лекция 6) Усилия на рычагах управления элеронами и рулем направления в прямолинейном установившемся полете со скольжением…………………………………… 35
3.3.2. Балансировка с отказавшим двигателем……………………………………………..37
3.3.3. Балансировка ВС в установившемся криволинейном пространственном движении…………………………………………………………………………………………..39
4. (Лекция 7) Динамика возмущенного движения. Уравнения возмущенного движения ВС и методы их исследования…………………………………………………………………42
4.1.Математические методы исследования…………………………………………………..43
4.1.1. Решение линейных дифференциальных уравнений с постоянными коэффициентами классическим методом. Теоремы А.М. Ляпунова об устойчивости…….. 44
4.1.2. Решение линейных дифференциальных уравнений с постоянными коэффициентами операторным методом……………………………………………………… 48
4.1.3. (Лекция 8)Исследование управляемого движения с помощью передаточных функций……………………………………………………………………………………………49
5. Динамика продольного возмущенного движения ВС ……………………………………50
5.1. Собственное продольное возмущенное движение ВС. Условия устойчивости
опорного движения………………………………………………………………………………..51 5.2. Выделение быстрой и медленной составляющих продольного возмущенного движения…………………………………………………………………………………………..52
5.2.1. Собственное продольное короткопериодическое возмущенное движение ВС. Условия устойчивости опорного движения…………………….………………………………52
5.2.2. Собственное продольное длиннопериодическое возмущенное движение ВС. Условия устойчивости опорного движения…………………….………………………………54
5.3. Реакция ВС в продольном движении на отклонение органов управления ………….56
5.3.1. Передаточные функции ВС в короткопериодическом возмущенном движении..56
5.3.2. (Лекция 9)Характеристики переходных процессов в короткопериодическом движении………………………………………………………………………………………….57
5.3.3. Передаточные функции возмущенного траекторного движения ВС в вертикальной плоскости(включая длиннопериодическое)…………………………………………………….60
6. Динамика бокового возмущенного движения ВС …………………………………….....62
6.1. Уравнения бокового возмущенного движения………………………………………….62
6.2. Устойчивость в боковом возмущенном движении…………………………………….63
6.2.1. (Лекция 10)Устойчивость быстрого бокового движения………………………...65
6.3. Передаточные функции ВС в боковом возмущенном движении………………………66
6.4. Анализ переходных процессов в боковом возмущенном движении…………………..68
6.4.1. Реакция ВС на отклонение элеронов…………………………………………………68
6.4.2. Реакция ВС на отклонение руля направления ………………………………………69
7.Особенности динамики пространственного движения…………………………………..69
7.1. Сваливание ВС……………………………………………………………………………70
7.2. (Лекция 11)Авторотация…………………………………………………………………70
7.3. Штопор……………………………………………………………………………………72
8. (Лекции12/13)Системы управления ВС …………………………………………………...74
8.1. Улучшение пилотажных характеристик в продольном движении……………………77
8.1.1. (Лекция 14)Демпфер тангажа………………………………………………………77
8.1.2. (Лекция 15)Автомат продольной устойчивости…………………………………..80
8.2. (Лекция 16)Автоматическое управление…………………………………………… 82
Приложение 1. Категории посадочных минимумов. Оценки пилотом технических показателей совершенства ВС. Требования к летно- техническим характеристикам ВС. Требования к пилотажным характеристикам ВС……………………………………………….83
Приложение 2. Частотные критерии устойчивости и нормирование запасов устойчивости.
Критерий Найквиста………………………………………………………………………………86
Литература......................................................................................................................................89
Вопросы к коллоквиуму по курсу «Устойчивость и управляемость транспортных воздушных судов» ……………………………………………………………………………………………...90
Лекция 1.Введение. Устойчивость и управляемость движения. Общие понятия. Проанализируем сначала «устойчивость положения», как частный случай движения в фик- сированный момент времени. Пусть на сечении рельефа местности, изображенном на рис.1, находятся идеальной формы шарики. Для проверки устойчивости используем
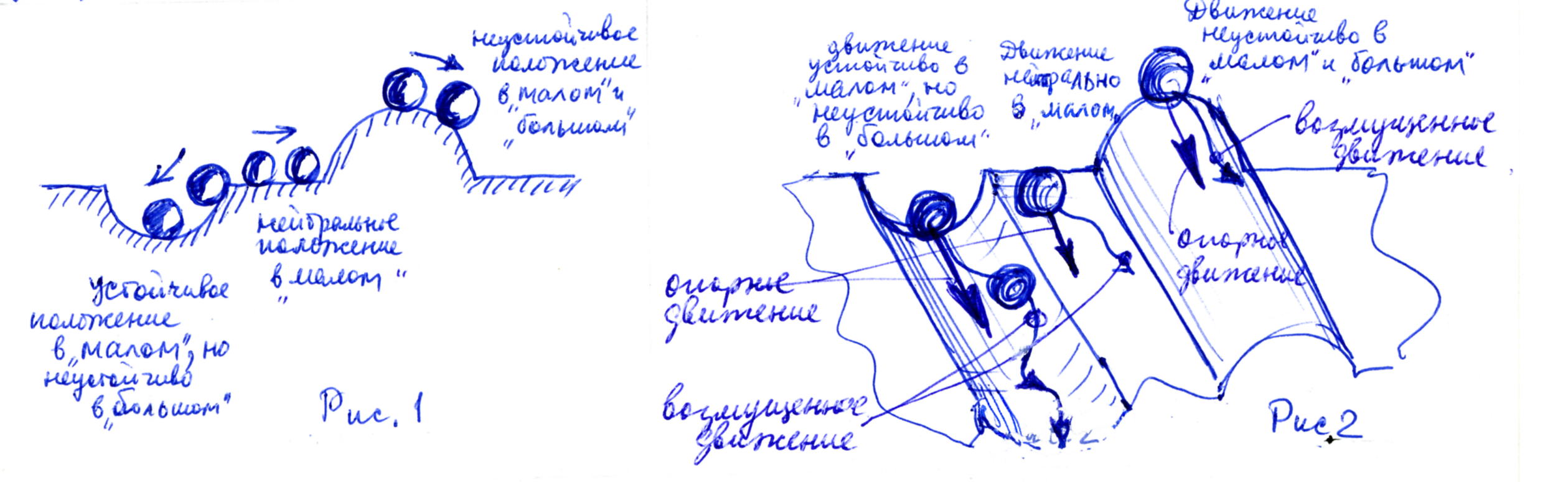
«принцип малых возмущений» при малых отклонениях от опорного (заданного) положения. На рис.2 с тем же рельефом принята не горизонтальная, а наклонная поверхность, а в качестве «опорного» - принято движение по средней (нижней) линии желобка слева, в средней части – положение произвольно, а справа примем за опорное (желаемое) движение по верхней части выпуклого желобка. Аналогично с помощью «метода малых возмущений» можно проверить будет ли движение устойчиво или нет. Характер возмущенного (в отклонениях от опорного) движения зависит от «кривизны» склонов выгнутого и выпуклого желобков.
1.1. Виды устойчивости движения. Под устойчивостью ВС понимается его способность без участия пилота сохранять заданный опорный (невозмущенный) режим полета и возвращаться к нему после непроизвольного отклонения под действием внешних возмущений, при условии прекращения действия возмущений. Различают устойчивость «в малом» и устойчивость «в большом» соответственно при малых (конечных) и больших возмущениях. Меру «малости» возмущений к сожалению не всегда можно указать заранее. Остановимся на этой проблеме в разделе линеаризации уравнений возмущенного движения. В зависимости от вида опорного движения рассматривают статическую устойчивость (обычно при балансировочном прямолинейном или криволинейном движении) и динамическую устойчивость при произвольном опорном режиме движения .
В соответствии с видом переходного
процесса различают апериодическую
и колебательную устойчивость. Если
переходный процесс (возмущенное движение)
в пределе совпадает с опорным
(невозмущенным) по времени при
![]() то устойчивость называют асимптотической.
Иногда вводят понятие устойчивости
на конечном отрезке времени. Важное
место среди различных видов устойчивости
занимает статическая устойчивость по
выбранному параметру.
то устойчивость называют асимптотической.
Иногда вводят понятие устойчивости
на конечном отрезке времени. Важное
место среди различных видов устойчивости
занимает статическая устойчивость по
выбранному параметру.
ВС будет статически устойчивым по выбранному параметру, если малое отклонение этого параметра (при всех остальных неизменных) от опорного значения сразу же приводит к появлению сил и/или моментов, направленных на уменьшение этого отклонения, после прекращения действия возмущений. Если силы и моменты направлены на увеличение этого отклонения, ВС – считается статически неустойчивым по этому выбранному параметру. В качестве параметра принимаются: коэффициент Cya, нормальная перегрузка nya, скорость V, угол атаки α, угол скольжения β и др. при их балансировочных значениях для опорного прямолинейного или криволинейного движения.
Для исследования динамической устойчивости (при возмущениях по начальным условиям), при построении систем автоматического управления широко применяют понятие устойчивости, предложенное академиком А.М. Ляпуновым (для краткости называют устойчивость по Ляпунову). Рассмотрим это понятие более подробно.
Предполагается, что движение исследуемой динамической системы описывается векторным дифференциальным уравнением (в форме Коши) вида