Усі книги і методички
.pdfгде vi — скорость распространения звука в направлении i-и точки; ti — время пробега луча от вибратора до i-й точки и обратно.
Каждый новый импульс регистрируется в новой строке эхограммы. Совокупность строк с отметками различной яркости создает теневое изображение рельефа дна и обеспечивает принципиальную возможность дешифрирования рельефа. Однако практическое осуществление дешифрирования остается одной из наиболее сложных задач при использовании эхографов. Другой недостаток существующих эхографов состоит в том, что они не позволяют получать количественную оценку глубин и, следовательно, не пригодны для включения в автоматизированные гидрографические системы.
В настоящее время эхографы бокового обзора используются для обследования подводного рельефа в промежутках между съемочными галсами с целью выявления сложных участков, где необходимо увеличение подробности. Их совершенствование идет по пути создания схем, позволяющих получать глубины и горизонтальные расстояния, например, на принципе интерференции. Другое перспективное направление состоит в использовании акустического поля для получения трехмерных моделей рельефа с помощью голографии.
Среди отечественных средств бокового обзора отметим гидрографический эхограф ГЭБО-100, а также гидрографические комплексы ГКБО-2000 и ГКБО-500.
* * *
На современных гидрографических судах размещаются многочисленные гидроакустические средства, включающие не только многолучевые эхолоты, эхографы, но и навигационную гидроакустическую аппаратуру, приборы для измерения скорости звука в воде, равно как и обычные эхолоты. Управление их работой, регистрация и обработка информации, могут осуществляться лишь на базе современных ЭВМ.
Гидроакустическое устройство, объединяющее в едином схемноконструкторском решении все гидроакустические средства, расположенные на судне, и обеспечивающее решение всех задач в области гидроакустики, возникающих при производстве съемки, называют гидроакустическим комплексом.
В зависимости от доминирующей задачи подобные комплексы получают уточняющие названия. Так, известны многолучевые гидроакустические комплексы (МГК), позволяющие производить площадное обследование рельефа дна, и гидрографические комплексы бокового обзора (ГКБО), позволяющие осуществлять инструментальную оценку рельефа дна между галсами промера.
4. Оптические средства Оптические средства для съемки рельефа дна основаны на закономерностях
распространения света и свойствах оптического поля.
Используются и разрабатываются два основных направления получения информации о подводном рельефе с помощью оптических средств: фотографирование и светолокация. В обоих случаях замкнутая измерительная цепь включает: источник света - среду - объект облучения - среду - приемник.
При воздушной фотосъемке источником света служит лучистая энергия Солнца, при подводной - специальные осветительные устройства. Приемником в обоих случаях
является фотопленка.
Светолокационные способы в качестве источника света используют мощное узконаправленное излучение импульсных устройств.
Средой распространения света при съемке подводного рельефа являются вода или система воздух - вода. Оптические особенности морской воды определяются свойствами трех ее составляющих: чистой воды, растворенных веществ и взвешенных частиц. Проходя через воду, световой поток поглощается и рассеивается. Tаким образом, важнейшим свойством морской воды, которое оказывает влияние на характеристику оптических средств съемки рельефа, является быстрое ослабление света с глубиной. При двухсредной съемке существенное влияние оказывает также отражение света от поверхности раздела воздух - вода.
Объект, находящийся в воде, воспринимается оптическими приемниками только в том случае, если он по яркости или цвету отличается от окружающего фона.
Следовательно, к основным факторам, определяющим характеристику и возможности оптических средств съемки рельефа дна, следует отнести:
—оптические свойства морской воды;
—мощность и энергетический спектр оптических излучателей;
—размеры и отражающие свойства форм подводного рельефа;
—контрастную чувствительность оптических приемников.
Способ фотографирования подводного рельефа реализуется преимущественно средствами аэрофотосъемки (АФС). В качестве носителей аэрофотосъемочной аппаратуры используются специальные варианты серийных самолетов и вертолетов.
Вкачестве устройств для получения информации о подводном рельефе используются современные аэрофотоаппараты (АФА), способные выполнять съемку в автоматическом режиме с помощью командных приборов, выдерживающих заданный интервал фотографирования и требуемую экспозицию. Для соблюдения жестких условий съемки АФА обеспечиваются гиростабилизирующими установками, навигационными комплексами, высокоточными высотомерами и автоматическими регистраторами времени. Результаты АФС подводного рельефа и побережья представляются в виде контактных отпечатков с аэрофотофильмов.
Для подробного изучения микрорельефа дна используются подводные стереофотоаппараты. Здесь фотокамеры заключаются в водонепроницаемые боксы, а в качестве источника света применяются мощные импульсные устройства, синхронно с которыми работают фотокамеры. Стереоснимки дают возможность получать объемную модель морского дна.
Основное достоинство средств фотосъемки состоит в возможности получения большого количества информации за короткие промежутки времени. Недостатки определяются малой прозрачностью воды (малыми глубинами), различиями спектральных характеристик грунта и отражением света от поверхности воды. Фотоизображение рельефа может быть получено лишь в лабораториях после проявления пленки, а картографирование сопряжено со сложным процессом обработки.
Взарубежных странах в последние годы стали развиваться новые направления обследования морского дна: ультразвуковая локация рельефа с изображением на
экране ЭЛТ и акустическая голография. В первом случае производится облучение ультразвуковыми волнами, преобразование отраженных сигналов в электрические и синхронное формирование визуального изображения на телевизионном экране.
В методе акустической голографии дно облучается звуковой волной, которая после отражения накладывается на когерентную опорную волну, создавая дифракционную картину объекта. Эта картина регистрируется и после облучения когерентным источником света (обычно лазером) создает видимое объемное изображение подводного рельефа.
Следовательно, акустическая голография занимает промежуточное место между ультразвуковой локацией и стереофотосъемкой: для получения голограммы используется звуковая волна, а для. получения объемного изображения - свет. Экспериментальные системы, работающие на указанном принципе, позволяют получить изображение небольших участков дна в крупном масштабе, отличаются весьма сложной аппаратурой, но обладают большой разрешающей способностью и позволяют производить съемку на расстояниях до 40 - 50м.
Способ светолокации стал интенсивно развиваться после создания квантовых генераторов (лазеров) несколькими группами физиков в СССР, США и Канаде. Лазеры быстро получили признание в различных областях науки, техники и производства. Это определяется уникальными свойствами излучаемого ими света: когерентностью, высокой монохроматичностью, малой длительностью импульсов, малой расходимостью луча и большой мощностью.
Лазерные средства для съемки подводного рельефа разрабатываются и применяются на гидрографических работах во многих странах. Особая их ценность состоит в возможности измерения глубин через поверхность раздела воздух - вода при больших скоростях носителей аппаратуры. Определение глубин с летательных аппаратов основано на измерении временного интервала t между моментами начала отражения световой энергии водной поверхностью и дном в каждом отдельном импульсе: z=0,5ct.
Практически постоянная скорость распространения света с в воде устраняет погрешности, обусловленные изменением гидрологических условий, малая расходимость исключает погрешности за наклон дна, а малая длительность импульсов обеспечивает высокую разрешающую способность.
§ 48. ПОГРЕШНОСТИ ИЗМЕРЕНИЯ ГЛУБИН
1. Источники погрешностей Независимо от средств и способов съемки, а также от формы представления
результатов съемки носителем информации о рельефе дна является глубина. Следовательно, погрешности измерения глубин оказывают непосредственное влияние на окончательные результаты съемки и определяют ее точность. Глубины, измеренные гидроакустическими средствами, так же как результаты иных измерений, отягощены систематическими и случайными погрешностями.
Влияние систематических погрешностей существенно уменьшается введением

исправлении измеренных глубин. |
||
Формулу поправки |
z |
за отклонение действительной скорости звука в воде от |
|
||
расчетной получим, вспомнив, что поправка отличается от погрешности лишь обратным знаком
z |
|
|
|
|
z |
|
|
1 |
|
|
|
|
|
|
|
|
|||
|
|
0 |
||
3. Погрешность, вызываемая рефракцией Скорость звука υ остается постоянной только в акустически однородной среде.
Морские воды не обладают этим свойством. Неоднородную толщу морской воды представляют обычно в виде сложной модели, где множество слоев, обладающих неодинаковыми акустическими свойствами, располагается параллельно уровненной поверхности. Скорость звука в такой среде изменяется в зависимости от температуры t, солености S, гидростатического давления Р и некоторых других факторов. Импульсы эхолотов (вертикальные лучи), движущиеся по нормали к указанным слоям, будут изменять скорость в каждом из них соответственно приращению акустической плотности. Наклонные лучи согласно законам геометрической оптики на границе каждого слоя будут испытывать преломление на такой угол γi что везде сохраняется равенство
|
0 |
|
|
|
1 |
|
... |
|
i |
const |
|
|
|
|
|
||||||
sin |
|
sin |
|
|
sin |
|
||||
0 |
|
1 |
|
1 |
||||||
|
|
|
|
|
|
|
|
|||
где γ0 — угол отклонения луча относительно вертикали в момент излучения; γi — угол отклонения луча от вертикали на i-ом горизонте.
Следовательно, звуковые лучи будут постепенно искривляться и траекторию импульса, излученного под углом то, можно представить некоторой кривой, отклоняющейся от начального прямого направления.
Явление искривления звукового луча в акустически неоднородной среде получило название рефракции.
Если скорость звука с глубиной возрастает, то приращения угла γ также положительны, а луч постепенно искривляется, приближаясь к горизонтальному.
Если скорость звука с глубиной уменьшается, то приращения угла γ отрицательны и луч последовательно приближается к нормали. В первом случае рефракцию называют положительной, во втором — отрицательной. В реальных условиях морских вод преобладает отрицательная рефракция.
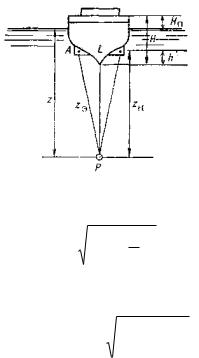
Явление рефракции представляет собой источник погрешностей при производстве съемки рельефа акустическими средствами, измеряющими наклонные расстояния. Рассмотрим характер погрешностей для подобных условий (рис. 66).