Рис.68
Таким образом, вместо действительной глубины z под килем эхолот зарегистрирует наклонное расстояние zH.
Погрешность, которая зависит от угла наклона дна а, может быть получена по очевидной формуле
С целью исключения погрешности |
|
z |
измеренные |
|
|
исправляться поправкой z |
|
|
|
|
|
|
z |
z |
H |
z z |
H |
(sec 1) |
|
|
|
|
|
(12.16)
глубины должны
(12.17)
Углы наклона а обычно невелики и редко превышают 20°, поэтому разложим secа в ряд и, ограничиваясь первыми членами, напишем
Подставив полученное значение secа в равенство (12.17), напишем другое выражение для поправки за наклон дна
Если угол γ между вертикалью и. образующей конуса излучения эхолота меньше угла α, то измеренным окажется не расстояние ZH по нормали к уклону дна, а расстояние zИЗМ образующей конуса. Тогда поправку за наклон дна получим по формуле
z zИЗМ [cos( ) sec 1] |
(12.19) |
Иногда в пределах конуса излучения может оказаться несколько отражающих площадок (впадины, выступы). Здесь запись на эхограмме искажается с заметной тенденцией к сглаживанию рельефа. В таких случаях требуется тщательное изучение и дешифрирование эхограмм.
сопряжено с заметными трудностями (см. § 49) и не
отличается высокой точностью. Поэтому современные прецизионные эхолоты имеют узкие диаграммы направленности, при которых погрешности за наклон дна практического значения не имеют.
8. Погрешность, возникающая при качке судна Волнение моря приводит к перемещению вибраторов в вертикальной плоскости
и вызывает качку судна. Вертикальные смещения регистрируются на эхограммах волнистой линией профиля, а воздушные пузырьки рассеивают энергию звуковых импульсов, что выражается в пропусках регистрации глубин. При сильной качке эхолоты работают неустойчиво, а погрешности измерений возрастают и не поддаются правильному учету.
Небольшие углы качки не вызывают заметных погрешностей у эхолотов с широкой диаграммой направленности, так как здесь сохраняется возможность измерять кратчайшие расстояния. Иначе обстоит дело при использовании остронаправленных эхолотов и особенно акустических систем с наклонными лучами. Для устранения или ослабления влияния качки применяются различные технические
меры. Углы качки во многих системах измеряются, а затем учитываются.
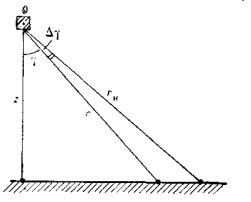
Рис.69
Обратимся к рис. 69, где влияние бортовой качки рассматривается на примере системы с наклонными лучами, расположенными в вертикальной плоскости, нормальной к диаметральной плоскости судна.
Здесь обозначены:
r — наклонное расстояние, измеренное при отсутствии качки; rк — наклонное расстояние, измеренное при качке;
γ — угол между вертикалью и заданным направлением наклонного луча; Δγ— угол бортовой качки;
z — действительная глубина в точке О;
zк —погрешность глубин из -за бортовой качки;
В акустических системах с наклонными лучами глубину получают по измеренным наклонным расстояниям в соответствии с формулой (12.5)
|
zK = rKсosγ |
|
|
(12.20) |
Действительную глубину z в точке О можно получить, если будет учтен |
угол бортовой качки |
|
|
|
|
|
|
|
|
zK = rKсos(γ+ |
γ). |
|
(12.21) |
Следовательно, возникает |
погрешность |
z |
представляющая |
|
разность |
к , |
|
между измеренной zк и действительной z глубинами |
|
|
|
z z |
K |
z r [cos cos( )] |
(12.22) |
K |
|
K |
|
|
Формула (12.22) представляет строгое решение для определения погрешности, |
но не может быть использована для расчетов, |
если углы качки |
γ не |
измеряются. |
|
|
|
|
|
|
|
Для оценки погрешностей в глубинах при бортовой качке, когда углы γ не измеряются, дифференцируем (12.20) по переменной γ и, перейдя к конечным
приращениям, напишем
где под символом γ следует понимать возможные углы качки при данных условиях.
§ 49. ОПРЕДЕЛЕНИЕ ПОПРАВОК ГЛУБИН, ИЗМЕРЕННЫХ ЭХОЛОТОМ
1. Определение общей поправки глубин Для исключения систематических погрешностей все измеренные глубины
должны быть исправлены общей поправкой глубин |
z, которая равна алгебраической |
сумме поправки глубин за уровень |
zf и поправки эхолота |
zЭ |
|
|
|
|
|
|
|
z = |
zf + |
|
zЭ. |
|
|
|
|
(12.24) |
Определение поправки глубин за уровень |
zf для приведения измеренных глубин |
к нулю глубин рассмотрено в § 21. |
|
|
|
|
|
|
|
|
|
|
Поправка эхолота zЭ, в общем случае, равна сумме частных поправок, |
рассмотренных в пп. 2 и 4 - 7 настоящего параграфа, т.е. |
|
|
|
z |
Э |
z |
z |
n |
z |
МО |
z |
L |
z |
B |
z |
ПР |
z |
(12.25) |
|
|
|
|
|
|
|
|
|
и может быть определена двумя способами: тарированием эхолота или суммированием частных поправок.
2. Определение поправок эхолота тарированием Тарированием называют такой способ определения поправок, при котором
поправки определяют непосредственным сравнением глубин, измеренных эхолотом, с глубинами, полученными другим, заведомо более точным способом.
Наиболее просто и надежно такое сравнение можно осуществить путем измерения эхолотом глубины погружения в воду какого-либо предмета с одновременным измерением этой же глубины точным мерным прибором. Обычно для тарирования используются специальные тарирующие устройства (диск, доска).
Рис. 70 Тарирующее устройство 1 (контрольная доска — рис. 70а или контрольный диск
— рис. 70б) опускается на различные глубины на мерных стальных линях 2 так, чтобы оно располагалось на одной вертикали с вибраторами 3 эхолота. Марки на мерных линях размечаются при должном натяжении на выверенном компараторе. Лини маркируют от поверхности отражателя на 2, 3, 4, 5, 7, 10, 15, 20 и 30м. На этих же горизонтах проводится сличение глубин как при опускании тарирующего устройства, так и при его подъеме. Способ тарирования применяют для глубин не более 30м.
В виде исключения допускается тарирование по грунту. В этом случае его выполняют сравнением глубин, измеренных эхолотом и ручным лотом, на нескольких участках промера с ровным дном, плотным грунтом и такими глубинами, которые перекрывали бы весь диапазон глубин, встретившихся в данный рабочий день.
Тарирование любым способом производят на стопе или в дрейфе при состоянии моря, которое позволяет получать поправки для всех горизонтов с заданной точностью.
Из описания сущности тарирования вытекает вывод, что этот спо соб позволяет, в общем случае, получить поправки глубин, исключающие или уменьшающие влияние целого ряда систематических погрешностей.
Действительно, если обозначить через zл точную глубину, полученную по линю, а через zэ — глубину того же горизонта, полученную в результате измерений эхолотом, то разность их окажется суммарной поправкой zт, выявленной в процессе тарирования:
zт
Суммарная поправка тарирования
частных поправок
= zл - zэ
zт может быть представлена как сумма
Таким образом, вместо расчета поправок, входящих в равенство (12.25), в
результате тарирования |
получают суммарную |
поправку zт, которая служит |
для |
исправления измеренных глубин. |
|
|
|
|
Сравнивая (12.25) |
и (12.26), легко заметить, |
что суммарная поправка |
zт |
не |
исключает влияние двух |
погрешностей: zа и |
zпр. |
Это понятно: погрешности |
zа и |
zпр возникают лишь в процессе промера, когда встречаются участки с наклонным дном или когда промер ведется на мелководье.
Поправку zа за наклон дна целесообразно вводить лишь при значительных глубинах и углах наклона более 5°. На глубинах тарирования (до 30м) она пренебрежимо мала и не учитывается.
Поправка zпр за проседание судна на мелководье определяется в результате натурных испытаний. С этой целью на участке испытаний выставляются вехи на различных глубинах. Величина поправки zпр определяется путем сопоставления глубин, измеренных эхолотом у каждой из вех на стопе и при движении на различных скоростях. У каждой вехи совершают для этого несколько пробегов на тех скоростях, которые установлены на промере, а в начале и в конце испытаний измеряют также глубину с неподвижного судна.
Если испытания не проводились, поправка zпр может быть рассчитана по формуле
где Н — осадка судна на стопе, м; z — глубина, м;
g — ускорение силы тяжести, м/с2;
k — коэффициент, зависящий от отношения длины судна L к его ширине В;

V —- скорость судна, м/с.
Такие расчеты выполняют для отношений z/H от 1,1 до 4 и для скоростей, используемых на промере. Например, для гидрографического катера (H=0,7м, L=8м, B=2,5м, k=1,41) на глубине z=3,5м и скоростях 5 и 7 уз получим: zпр=0,14м,
zпр=0,29м соответственно.
Как видно из этого примера, поправка zпр обычно невелика и учитывается только в тех случаях, когда глубины необходимо отсчитывать с точностью до 0,1м.
Поправки zМO, zL, входящие в (12.26), могут оставаться стабильными в течение длительного времени. Иначе обстоит дело с поправками zn, zB, и особенно
zυ.
Нетрудно увидеть, что в поправке zТ автоматически учитывается погрешность Δ'zn, возникающая из-за уклонения частоты вращения электромотора в момент тарирования от номинальной частоты, на которую рассчитан эхолот.
В период съемки частота вращения может оказаться иной, что приведет к изменению погрешности и должно быть учтено при окончательном исправлении глубин. Эта новая поправка вычисляется по формуле
где nт — частота вращения электромотора при тарировании, nс — частота вращения электромотора при съемке.
Определение частоты вращения электромотора пс производят через каждые 1—2 ч, а результаты записывают в журнал или на эхограмме.
Поправка zυ учитывает отличие номинальной скорости υ0 от реальной вертикальной скорости звука υ в точке измерения глубины. Как будет показано ниже, реальная вертикальная скорость υ является источником наибольших погрешностей, претерпевая пространственно-временные изменения главным образом в зависимости от температуры воды. Это вынуждает производить многократное тарирование эхолота в различных участках района работ и в различное время, сообразуясь с возможными изменениями скорости звука. Тарирование требует немалых затрат времени и, естественно, снижает производительность съемки.
Врайонах со стабильными гидрологическими условиями тарирование
производят один-два раза в сутки. Расхождение суммарных поправок zт, определенных по результатам двух последовательных тарирований с учетом изменения частоты вращения электродвигателя, не должно превышать 0,3м. При выполнении этого условия глубины, измеренные в процессе съемки, исправляются поправкой zЭ, которую получают по формуле
где δzв — поправка за изменение углубления вибраторов при съемке по сравнению с углублением при тарировании;
zпр — поправка за проседание (изменение осадки) судна при движении на мелководье.
Для того чтобы любая глубина была исправлена с необходимой точностью по дискретным значениям поправки zт, определенной на стандартных горизонтах, строят
график, вертикальная ось которого служит для откладывания глубин z, а горизонтальная — соответствующих поправок zт. Тогда для любой промежуточной глубины можно снять значение zт, непосредственно с графика как расстояние по нормали от точки zi до линии поправки zт,=f(z).
В районах с неустойчивым гидрологическим режимом, когда результаты смежных тарирований расходятся на недопустимую величину, вместо увеличения их частоты целесообразно принять меры для непосредственного учета изменений
автоматически в момент дифференцированием (12.3):
Тогда |
приращение |
z |
|
|
первого тарирования, |
z |
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
,учтенной
получено
(12.28)
а суммарная поправка zЭ в этом случае будет равна |
|
zЭ = zт + δzυ + δzn + δzB + zпр |
(12.29) |
3. Определение поправок эхолота суммированием частных поправок Тарирование позволяет определять поправки только до глубин не более 30м,
пока измерения мерным линем еще достаточно надежны и точны. Для больших глубин поправка zЭ вычисляется как сумма частных поправок, полученных в результате учета отдельных погрешностей, свойственных эхолотам,
zЭ = zυ + zn + zмо + zL + zв + zα, (12.30)
Уравнение (12.30) отличается от общего уравнения (12.25) отсутствием поправки zпр за проседание судна при движении. Выше упоминалось, что по малости эту поправку целесообразно учитывать лишь для мелководных районов при точности отсчитывания глубин 0,1м. При использовании многолучевых гидроакустических устройств с наклонными лучами дополнительно учитываются поправки за рефракцию
и качку судов.
Остановимся подробнее на способах вычисления указанных поправок. А. Поправка zυ
Поправка zυ, за отклонение действительной скорости звука в воде от расчетной может быть получена по формуле (12.3). Для этого необходимо располагать значением истинной вертикальной скорости звука в морской воде υ.
Вертикальная скорость звука в морской воде может быть получена двумя способами:
—косвенным определением по величинам, функционально связанным со скоростью;
—прямым измерением с помощью специальных устройств.
Косвенный способ до недавнего времени был основным и базируется на измерении температуры Т, солености S и гидростатического давления Р морской воды на различных глубинах. Расчет скорости по этим величинам может быть осуществлен, если известна зависимость υ = f(T, S, Р).
На практике используются преимущественно эмпирические формулы, например:
υ= 1410 + 4,21T - 0,037T2 + 1,14S + 0,0175z. |
(12.31) |
Для расчета υ при небольших глубинах часто используют эмпирическую
формулу Дель Гроссо: |
|
υ = 1448,6 - 4,618T - 0,0523T2 + 0,00023T3 + 1,25(S - 35) - |
|
- 0,011(S - 35)Т + 0,00875z |
(12.32) |
По (12.32) составлены небольшие таблицы, которые приводятся в различных |
пособиях по гидрографии. |
|
Наиболее точной на больших глубинах считают формулу Вильсона, |
предложенную в 1962 г., |
|
υ = υ0 + ΔυT + ΔυS + ΔυP + ΔυРST |
(12.33) |
где υ0 = 1499,14 м/с — скорость звука при Т = 0°, S = 35°/00, Р = 1,033кг/см2; |
|
ΔυT. — поправка скорости за температуру воды:
ΔυT = 4,5721Т - 4,4532 • 10-2Т2 - 2,6045 • 10-4Т3 + 7,9851 • 10-6Т4;
ΔυS — поправка скорости за соленость:
ΔυS = 1,398(S -35) + 1,692 • 10-3 (S-35)2;
ΔυP — поправка скорости за гидростатическое давление:
ΔυР = 1,60272 • 10-1Р + 1,0268 • 10-5Р2 + 3,5216 • 10-9P3 - 3,3603 • 10-12P4;
ΔυРST — поправка скорости на суммарное воздействие гидростатического давления, солености и температуры.
Г. Н. Серавин [32] предложил более удобную формулу учета гидростатического давления по глубине z
Δυz = 0,1636 + 1,648 • 10-2z + 1,468 • 10-7z2 + 4,315 • 10-12z3 - - 3,48 • 10-16z4 - 3,4 • 10-21z5.
Формула Вильсона позволяет вычислять скорость звука со средней квадратической погрешностью 0,22м/с. По этой формуле составлены Таблицы для
расчета скорости звука в морской воде [39].
По всем перечисленным формулам можно вычислять горизонтальную скорость звука в том слое воды, для которого известны температура, соленость и плотность.
Вертикальная скорость звука в связи с изменением Т, S, Р с глубиной изменяется по весьма сложному закону. Эту действительную скорость не представляется возможным учитывать для всей толщи воды. Поэтому переменную вертикальную скорость аппроксимируют такой средней скоростью, при которой реальная звуковая волна и звуковая волна, движущаяся со средней скоростью, проходят расстояние от поверхности моря до дна и обратно за один и тот же интервал времени. Указанную среднюю скорость υср можно получить по формуле
если вместо v подставить математическое выражение того закона, по которому она меняется с глубиной.
Для уяснения этого расчета воспользуемся наиболее простой эмпирической формулой (12.31), выделив в ней три основных члена, связанных с каким-либо одним гидрологическим элементом,
|
1 |
z |
|
1 |
z |
1 |
z |
|
|
СР |
(1410 |
0,0175z)dz |
1,14Sdz |
(4,21T 0,037T |
2 |
)dz |
z |
z |
z |
|
|
0 |
|
0 |
0 |
|
|
|
|
|
|
|
|
|
Второй и третий интегралы зависят соответственно от S и Т, а первый выражается непосредственно через глубину z.
Аналитическая зависимость S и Т от глубины весьма сложна, но, учитывая, что на практике можно получать скорость с некоторой погрешностью, да и сами величины S, Т измеряются с погрешностями, полагают, что для отдельных слоев воды законы изменения S и Т имеют линейный характер.
Соленость S в общем случае более консервативна и поэтому для любого горизонтального слоя можно написать
|
|
|
|
S = az + b, |
|
где а — градиент изменения солености с глубиной; |
|
b — значение солености на поверхности моря. |
|
|
Тогда |
|
|
|
|
|
|
|
|
z |
|
|
z |
|
|
z |
1 |
1,14Sdz 1,14 |
(az 2 b)dz 1,14 1 az 2 |
bz |
z |
0 |
|
z |
0 |
|
z 2 |
0 |
|
|
|
|
|
|
или |
|
|
|
|
|
|
|
|
|
1 |
z |
|
z |
|
|
|
|
1,14Sdz 1,14(a |
b) 1,14SCP |
|
|
|
z |
2 |
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
Таким образом, при расчете средней вертикальной скорости звука можно пользоваться величиной средней солености в слое от поверхности моря до дна.
Температура воды Т изменяется с глубиной более неравномерно и подобную аппроксимацию можно допустить лишь для отдельных слоев воды. Тогда по аналогии
1 |
z |
|
|
|
|
|
|
(4,21T 0,037T |
2 |
)dz 4,21T |
0,037T |
2 |
|
|
|
z |
|
|
CP |
CP |
0 |
|
|
|
|
|
|
|
|
|
|
|
В последней формуле
|
|
1 |
T |
T |
|
|
T T |
|
|
.... |
T |
T |
|
|
|
T |
|
0 |
1 |
p |
1 |
2 |
p |
|
n 1 |
n |
p |
|
|
|
|
|
|
|
2 |
|
|
n |
CP |
|
z |
|
2 |
1 |
|
|
2 |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где Тi — температура воды на соответствующем горизонте; pi — толщина слоев воды;
z — сумма всех pi (глубина в данной точке).
Рассмотренный метод позволяет получать среднее значение вертикальной скорости звука в морской воде независимо от конкретного вида расчетных эмпирических формул. Практически приходится рассчитывать только Scp и Tср, а затем выбирать по этим аргументам значение вертикальной скорости звука υср из упоминавшихся выше таблиц.
Информацию о распределении гидрологических элементов в районе работ получают по материалам изученности со специальных карт или по результатам измерений на гидрологических станциях в период съемки. Гидрологические станции располагают в наиболее характерных участках района с таким расчетом, чтобы
расстояния d между ними не превышали вычисленных по формуле
где S0 — расстояние между станциями, для которых вертикальная скорость звука известна, мили;
Δυ — разность вертикальной скорости звука от поверхности до равных наибольших глубин на этих станциях, м/с.
Измерения температуры и солености производят на стандартных горизонтах, расстояния между которыми зависят главным образом от характера изменения температуры с глубиной. Обычно в качестве стандартных используются горизонты с глубиной 0, 10, 20, 30, 50, 75, 100, 150, 200, 300, 400, 500, 600, 800, 1000, 1200, 1500,
2000м и далее через 500м, а для глубин более 5000м — через 1000м.
Температура, соленость, гидростатические давление и глубина измеряются на гидрологических станциях с помощью стандартных океанографических средств:
глубоководных термометров, термоглубомеров, термосолезондов, батитермографов, обрывных термозондов.
По данным, полученным на гидрологических станциях, строят два графика: температуры и солености, в зависимости от глубины. Кривые различных станций осредняют, соблюдая условие, чтобы максимальные расхождения между осредненной и фактическими кривыми не приводили к погрешностям в скорости звука более допустимых (обычно 7,5м/с).
После осреднения с графиков снимается Тi, и соленость Si, °/00 на каждом горизонте для расчета средних температур TСP и солености SCP во всем слое от поверхности до дна.
Всвязи с тем что сезонные колебания Т и S охватывают сравнительно небольшой верхний слой океанских вод, измерения гидрологических элементов целесообразно производить только для районов, расположенных в пределах материковой отмели и некоторой части материкового склона.
Востальных районах Мирового океана на глубинах более 200м распределение температуры Т и солености S достаточно стабильно. Это позволило рассчитать Таблицы для исправления глубин, измеренных эхолотом (№ 9209), из которых готовые
поправки zυ могут быть выбраны по номеру района и глубине.
Точность косвенного метода можно оценить, учитывая функциональную зависимость от температуры, солености и глубины:
m |
2 |
( |
д |
2 |
m |
2 |
( |
д |
2 |
m |
2 |
|
( |
д |
2 |
m |
2 |
|
|
) |
|
|
) |
S |
|
) |
z |
|
|
|
дТ |
|
T |
|
дS |
|
|
|
|
дz |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
откуда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m2 |
g 2T mT2 |
g 2S mS2 |
g 2z mz2 |
|
|
(12-37) |
где g 2T , g 2S , g 2z —градиенты скорости звука по температуре, солености, глубине.
Косвенный способ не учитывает множества второстепенных факторов, что вносит дополнительные погрешности и принципиально ограничивает возможность достижения высоких точностей определения скорости звука в морской воде.

Сущность прямого способа состоит в непосредственном измерении скорости звука с помощью специальных устройств. Наибольшее применение на практике получила группа устройств, основанных на определении времени задержки акустического сигнала при прохождении в воде небольшого расстояния (базы), известного с высокой точностью. По методам определения времени задержки устройства этой группы делятся на импульсные, фазовые, корреляционные и частотные. При измерении скорости звука в море используется преимущественно импульсно-циклический метод.
Практически здесь измеряется частота следования Fc импульсов, каждый из которых, пройдя базу в исследуемой среде, запускает следующий импульс Fc = υ/2l. Импульсно-циклические измерители обладают высокой точностью и надежностью, имеют малые габариты и позволяют регистрировать результаты измерений в аналоговой и цифровой форме, передавая их по любым каналам связи. Среди отечественных измерителей этого типа отметим разработанный в Морском гидрофизическом институте АН УССР [32], а также «ИЗМ-2000», предназначенный для гидрографических исследований. Последний позволяет измерять скорость звука с борта судов, находящихся в дрейфе, а при ограниченных глубинах и на ходу. Результаты автоматически регистрируются на бумажной ленте в виде графика вертикального распределения скорости звука, указываются на цифровом табло и одновременно регистрируются на телеграфной ленте в коде МТК.-2 с точностью до 1м по глубине и до 0,1 м/с по скорости звука.
Для расчета средней вертикальной скорости звука на участке от излучателя до i- гo горизонта по графику отбирают серию информативных точек и снимают значение скорости звука. Тогда
|
|
|
n |
|
|
|
|
|
|
|
|
( i |
i 1 )(zi |
zi 1 ) |
|
i 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
CP |
|
|
2(z |
|
z |
) |
|
|
|
|
|
n |
|
|
|
|
|
|
1 |
|
|
где υi, zi — значение скорости звука и глубины на i-м горизонте; zn — горизонт, для которого вычисляется средняя скорость; z1 — первое значение глубины, измеренной аппаратурой.
Глубину zЭ, соответствующую i-му горизонту, можно получить по очевидной формуле
|
z |
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Э |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
CP |
|
|
|
|
а поправку по формуле |
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
z |
|
z |
|
|
z (1 |
|
0 |
) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
Э |
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
СР |
|
Аппаратурой «ИЗМ-2000» измеряется скорость звука на глубинах до 2000м. При работе в районах с глубинами более 2000м вертикальная скорость может быть
рассчитана путем экстраполяции лишь с учетом вертикального градиента gz=0,018с-1. Температура и соленость на больших глубинах остаются практически постоянными.
Экстраполяция производится по формуле