

Distantsionny_kontrol_psikhofiziologicheskogo_sostoyania_s_pomoschyu_sverkhshirokopolosnoy_RLS
.pdf391
Непрерывные ШП СЧМ сигналы по сравнению с СШП видеоимпульсными сигналами имеют значительное преимущество в увеличенной средней мощности излучения и, следовательно, дально-
сти действия и проникающей способности биорадиолокационных систем через препятствия при при-
емлемой разрешающей способности по дальности.
Анализ выделения биометрического сигнала сердцебиения и дыхания в радиолокаторе с моно-
хроматическим сигналом показал существенное влияние вида обработки сигнала в приемном устрой-
стве на выходной биометрический сигнал и его амплитудный спектр. При когерентной квадратурной обработке спектр реализации комплексной амплитуды принимаемого сигнала не зависит от дально-
сти до человека и содержит истинные, кратные и комбинационные гармоники частот дыхания и сердцебиения вследствие естественной фазовой модуляции за счет колебаний границ тела и органов человека при дыхании и сердцебиении. Спектральный состав каждой квадратурной компоненты в отдельности, равно как и спектральный состав сигнала на выходе амплитудного приемного устрой-
ства, также содержащий комбинационные частоты, существенно зависит от дальности до человека
(дальностной фазы). При этом имеют место периодически повторяющиеся пораженные дальности, на которых в спектре одной квадратурной компоненты и в спектре амплитуды сигнала пропадают ис-
тинные частоты дыхания и сердцебиения и остаются только комбинационные гармоники. При дан-
ном виде ЗС неискаженная демодуляция биометрического сигнала должна основываться на извест-
ных методах фазовой демодуляции, простейшим из которых при малых уровнях шумовой помехи является выделение двух квадратур комплексной огибающей принимаемого сигнала и вычисление соответствующей им фазы (аргумента комплексной огибающей за вычетом его среднего по времени значения) в дискретные моменты времени.
Анализ радиолокатора с СШП ВИС при обнаружении живых объектов также показал наличие пораженных дальностей, вызываемых формой зависимости корреляционного интеграла обработки от относительного запаздывания принимаемого и опорного импульсов. Возможными мерами исключе-
ния пораженных дальностей являются применение системы автосопровождения по задержке с требу-
емой инерционностью или применение временных дискриминаторов с широким участком линейной дискриминационной характеристики. Последнее достигается с помощью двух расстроенных по за-
паздыванию корреляционных каналов приема видеоимпульса, стробируемых опорными импульсами специальной формы, длительность которых существенно больше длительности принимаемого видео-
392
импульса. Вследствие малой девиации положения принимаемых ВИС относительно величины их по-
стоянного периода повторения возможна также практически неискаженная демодуляция фазовой или преобразованной из нее широтной модуляции положения ВИС. Для выделения полезной информации достаточно провести фильтрацию импульсной последовательности фильтром нижних частот или по-
лосовым фильтром, граничные частоты которых охватывают полосу частот дыхания и сердцебиения.
Для обоснования характеристик и алгоритмов обработки в радиолокаторах с селекцией по дальности на основе применения ЗС с СЧМ проведено математическое моделирование алгоритмов обработки СЧМ сигналов при учете фазовой модуляции частотных компонент перемещениями по-
верхности тела при дыхании и сердцебиении. Результаты моделирования подтвердили возможность выделения спектральных компонент дыхания и сердцебиения человека в синтезированных стробах дальности на основе применения двумерного БПФ при дополнительном действии отражений от не-
подвижных и малоподвижных местных предметов. Проанализированы два варианта селекции цели на фоне отражений: 1) селекция в спектральной области с помощью режекторного фильтра с прямо-
угольной частотной характеристикой; 2) селекция во временной области с помощью аналоговых или цифровых фильтров верхних частот в каждом из частотных каналов по каждой квадратурной компо-
ненте. При небольшой постоянной времени фильтров такой метод позволяет при малом времени установления фильтров получить дополнительный полезный эффект, заключающийся в ослаблении компонент дыхания и относительном усилении компонент сердцебиения. Конечным результатом об-
работки сигналов, отраженных от живых объектов, в радиолокаторе с СЧМ и селекцией по дальности является выделение сигнала сердцебиения и дыхания в той ячейке дальности, в которой расположен живой субъект. При этом неискаженным выходным сигналом является аргумент (фаза) комплексного корреляционного интеграла обработки в функции дискретного времени или номера периода зондиро-
вания в той ячейке дальности, в которой произошло обнаружение человека.
С помощью математического моделирования работы радиолокатора внутри помещений оцене-
но влияние интерференции за счет отражений от поверхностей пола, потолка и стен. Для расстояний от РЛС до объекта в единицы метров получено, что сигналы переотражений от зеркальных точек по-
верхностей через цель, имеющую характерные периодические колебания в ритме дыхания и сердце-
биения, не могут быть отрежектированы. Интерференция при небольшой полосе СЧМ сигнала в 150-
200МГц приводит к смещению отметки цели по дальности, ее расширению, а при определенных
393
условиях к дроблении отметки с появлением провала на истинной дальности до цели. С увеличением полосы частот СЧМ сигнала до значений порядка 0.8 - 1.0 ГГц, обеспечивающих разрешение по за-
держке прямых сигналов от цели и переотраженных целью сигналов зеркальных точек, достигается их полное разделение по дальности, при этом истинная отметка цели оказывается ближайшей.
Наличие эффекта интерференции за счет переотражения сигналов зеркальными точками и местными предметами через подвижную цель при работе биорадиолокаторов с одноканальными пе-
редающей и приемной антеннами внутри помещений, как и при отражениях от местных предметов,
требует учета этого явления и выбора увеличенной полосы частот СЧМ зондирующего сигнала и по-
следующего применения алгоритмического или иного метода режекции переотраженных сигналов.
На базе созданного макета прототипа радиолокатора малой дальности с невысокими характе-
ристиками разрешающей способности R 0.714м и однозначного интервала по дальности
Rmax 10.7м проведены две серии лабораторных экспериментов: 1) по обнаружению искусствен-
ных целей в виде колеблющихся маятников с грузом в виде металлического стержня и металлической пластины, 2) по обнаружению дышащего человека. Эксперименты проводились при различных даль-
ностях от цели до биорадиолокатора. В экспериментах по обнаружению маятника на диаграммах
«частота-дальность» имели место интерференционные отметки на дальностях, всегда больших даль-
ности до цели. При этом положение по дальности ближайшей отметки вполне точно соответствовало истинному положению цели. В ряде случаев отметки не разрешаются по дальности и интерферируют,
в результате чего имеет место небольшое смещение дальности истинной отметки.
При обнаружении дышащего человека также имеет место дальностный интерференционный гребень отметок, начало которого всегда соответствует истинной дальности до цели. Максимумы на бóльших дальностях объясняются переотражениями через человека от задней стены и от других плоскостей комнаты, а также от местных предметов. Особенность отражений от задней стены заклю-
чается в том, что человек переотражает их по принципу радиолокации на просвет, т.е. за счет образо-
вания на силуэте человека весьма интенсивной теневой компоненты рассеянного поля, которая при-
водит к большой величине сигнального максимума на увеличенной дальности, в ряде случаев пре-
восходящего прямое отражение от грудной клетки. В проведенных экспериментах вторая гармоника дыхания не наблюдалась, и практически не удалось обнаружить компоненту сердцебиения.
394
В целом эксперименты подтвердили работоспособность макета и правильность выбранных технических решений в части аппаратной режекции интенсивных отражений от неподвижных мест-
ных предметов. В экспериментах подтвержден также установленный с помощью математического моделирования факт наличия и влияния на сигнальную функцию в плоскости «частота-дальность» интерференционных переотражений от местных предметов и поверхностей в помещении через по-
движные объекты (маятник, дышащий человек). Простейшей мерой борьбы с такими переотражени-
ями является расширение полосы частот зондирующего сигнала вплоть до появления разрешения ин-
терференционных путей по дальности и применение логического выделения ближайшей отметки по дальности на обнаруженной частоте дыхания.

395
В.С. Черняк
5.3. Обнаружение неподвижных людей под завалами строительных конструкций с
помощью СШП радиолокатора.
5.3.1. Введение
Важность и актуальность проблемы поиска живых людей под завалами строительных кон-
струкций после землетрясений и других катастроф, а также террористических актов не вызывает со-
мнений. Известно много работ, посвященных решению этой, а также близкой проблемы обнаруже-
ния людей за оптически непрозрачными преградами с помощью радиолокаторов (например, [135, 67, 176, 234, 251, 261, 101, 252, 227, 233, 272]). Как правило, применяются сверхширокополосные (СШП)
радиолокаторы с наносекундными зондирующими импульсами, обладающие очень высокой разре-
шающей способностью по дальности. Ряд устройств есть уже на рынке [251, 261, 101, 252]. Некото-
рые из них специально предназначены для поиска людей под завалами (например, [262]). Живой че-
ловек обнаруживается благодаря квазипериодическим изменениям задержки эхосигналов в результа-
те движения поверхности тела при дыхании.
Несмотря на то, что дальность действия таких радиолокаторов обычно не превышает 8…10 м,
обнаружение живых людей оказывается весьма трудной задачей как из-за очень малой энергии каж-
дого наносекундного зондирующего импульса, так и из-за большого ослабления сигналов при их распространении сквозь завалы строительных конструкций. Кроме того, ЭПР движущейся части по-
верхности тела мала. Наконец, желательно учитывать ограничения излучаемой мощности, вытекаю-
щие из требований электромагнитной совместимости.
Все это приводит к необходимости оптимизации алгоритма обнаружения полезного сигнала.
Насколько мне известно, в имеющейся литературе отсутствует систематическое рассмотрение этой задачи. Настоящий раздел посвящен ее решению1) (краткое изложение результатов содержится в
[128, 141, 140]).
5.3.2. Основные особенности задачи обнаружения
Задача радиолокационного обнаружения живого человека в завалах строительных конструк-
ций имеет ряд существенных особенностей. Наиболее важные из них следующие.
1.Необходимо обнаружить неподвижного человека на фоне мощных отражений от окружаю-
1)Работа выполнена при поддержке РФФИ. Проект 05-02-08139.
396
щих его предметов (остатков стен, металлических конструкций и пр.). Отличие полезного сигнала,
отраженного от живого человека, от мешающих сигналов (пассивных помех) состоит в том, что, как отмечалось п.5.3.1, у полезного эхосигнала квазипериодически изменяется запаздывание благодаря колебаниям поверхности тела при дыхании. Таким образом, задача состоит в том, чтобы обнаружить слабые модулированные по запаздыванию эхосигналы на фоне собственных шумов приемника и не-
модулированных по запаздыванию мощных мешающих отражений. В принципе, можно использовать колебания поверхности тела, вызванные механическими колебаниями сердца. Однако их амплитуда в
20...25 раз [67] меньше, чем амплитуда колебаний при дыхании. Но амплитуда даже этих колебаний незначительна, обычно порядка 0.5…1 см [85], а амплитуда изменений запаздывания эхосигналов зависит от ракурса человека относительно радиолокатора.
2. Необходимо учитывать большое ослабление радиолокационных сигналов, распространяю-
щихся через завалы строительных конструкций. Это ослабление зависит от типа материала строи-
тельных конструкций и существенно возрастает как при увеличении толщины материала, так и при увеличении частоты сигналов.
3. Как известно из статистической теории обнаружения сигналов на фоне помех, форма сигна-
ла не влияет на характеристики обнаружения, важна лишь энергия сигнала. Поэтому и в рассматри-
ваемой задаче, в отличие от задач медицинской диагностики [67, 175, 85] не нужно выявлять форму и характер колебаний поверхности тела при дыхании. Необходимо максимально эффективно использо-
вать энергию полезного сигнала, поступающего на вход приемника.
4. Хотя обнаружение (и определение местоположения) живого неподвижного человека в зава-
лах должно проводиться как можно быстрее, затраты времени порядка нескольких минут вполне до-
пустимы. В течение этого времени местоположение «цели» не изменяется. Эта особенность значи-
тельно отличает рассматриваемую задачу от задачи обнаружения цели в обычной РЛС, например,
военного назначения, и создает важный резерв повышения энергетических характеристик.
5.3.3. Выбор параметров зондирующих сигналов
Параметры зондирующих сигналов следует выбирать исходя из описанных выше основных особенностей рассматриваемой задачи.
1. Чтобы обнаружить слабый полезный сигнал на фоне мощных мешающих отражений (пас-
сивных помех) необходимо использовать все возможные методы селекции сигнала. Целесообразно
397
сочетать пространственную и частотную селекцию. Пространственная селекция может быть реализо-
вана путем применения зондирующих сигналов с очень высоким разрешением по дальности, т.е.
сверхширокополосных (СШП) сигналов. Это позволит значительно уменьшить интенсивность пас-
сивных помех, маскирующих полезный сигнал, так как помехи будут создавать только те мешающие отражатели, которые попадут в малый элемент разрешения по дальности R вместе с обнаруживае-
мым объектом (например, R 0.3...0.5 м). При этом важно, чтобы автокорреляционная функция по-
лезного сигнала не имела боковых лепестков по дальности, через которые могут попадать пассивные помехи с других участков дальности (за пределами элемента разрешения). Подходящим зондирую-
щим сигналом, соответствующим этим требованиям, является очень короткий импульс длительно-
стью и 2...3 нс (т.е. с шириной спектра f 500...300 МГц) без внутриимпульсной модуляции.
2. Частотная селекция в принципе позволяет выделить полезный сигнал от движущейся при дыхании поверхности тела на фоне отражений от неподвижных предметов, попавших в тот же эле-
мент разрешения по дальности. Однако колебания поверхности тела при дыхании человека весьма медленные, их частота составляет обычно 0.2…0.5 Гц [67]. Для выделения полезного сигнала такой частоты на фоне отражений с нулевой частотой необходимо разрешение по частоте порядка 0.05 Гц.
Такое разрешение по частоте можно получить, если длительность обрабатываемого сигнала не менее
20 с. Таким образом, чтобы обеспечить эффективную пространственную и частотную селекцию по-
лезного сигнала на фоне пассивных помех следует обрабатывать зондирующий сигнал в виде коге-
рентной последовательности длительностью Т 20 с коротких импульсов с шириной спектра
300...500 МГц, т.е. длительностью и не более 2...3 нс.
3. Столь короткие зондирующие импульсы обладают малой энергией (при реальных значениях импульсной мощности передатчиков), поэтому для принятия решения об обнаружении желательно использовать энергию возможно большего числа импульсов поступающих от «цели». Благодаря ма-
лой дальности действия возможна высокая частота повторения импульсов. Если максимальную рабо-
чую дальность можно принять равной 10 м (Rmax = 10 м), то частота повторения импульсов может до-
стигать 15 МГц (Fп = 15 МГц). При этом следует иметь в виду, что благодаря высокому разрешению по дальности и свойствам «цели», отраженный сигнал в каждом элементе разрешения не флуктуиру-
ет, так что при определенных условиях возможно когерентное накопление эхосигналов.

398
4. Еще один важнейший параметр зондирующего сигнала несущая частота2) f0 (или длина волны 0). На выбор этой частоты влияют несколько противоречивых факторов.
С одной стороны, из-за малой амплитуды колебаний поверхности тела при дыхании R (обыч-
но 0.5…1 см) амплитуда колебаний задержки эхосигналов не превышает 0.1 нс. Это значит, что даже при длительности импульсов 2…3 нс смещением огибающих эхосигналов при дыхании практически можно пренебречь. Только фазы отраженного сигнала могут заметно изменяться. Если, однако, при этом амплитуда R составляет малую часть от длины волны несущего колебания 0, колебания фазы
отраженного сигнала относительно зондирующего малы, так что полезный сигнал, вызванный имен-
но этими колебаниями, также оказывается малым, что приводит к энергетическим потерям. Как будет показано далее, с точки зрения этого фактора длину волны несущего колебания следует выбирать не большей, чем 4 R, т.е. 0 4 см ( f0 7.500 ГГц). Кроме того, чем выше рабочая частота, тем меньше
могут быть размеры антенн, что очень важно для рассматриваемого радиолокатора, который должен быть переносным, т.е. иметь небольшие габариты и вес.
С другой стороны, чем ниже частота f0, тем меньше ослабление сигналов в материалах строи-
тельных конструкций. Имеющиеся в литературе данные об ослаблении сигналов при распростране-
нии через различные строительные материалы противоречивы. В работах [163, 253] приведены до-
статочно оптимистические данные. Например, ослабление сигнала на частоте f0 = 2 ГГц при прохож-
дении (в одну сторону) железобетонного блока толщиной 203 мм (8 дюймов) не превышает 9 дБ
[253], а на частоте f0 = 8 ГГц при распространении в бетонном блоке не превышает 10 дБ [163] (в по-
следнем случае толщина блока не указывается, но можно полагать, что она не меньше стандартной величины 4 дюйма, т.е. 102 мм). В то же время, в весьма подробном отчете Национального института стандартизации и технологии (США) [219] приводятся намного бóльшие значения ослабления сигна-
лов. Для той же частоты f0 = 2 ГГц и железобетонного блока толщиной 203 мм ослабление сигнала при одностороннем прохождении составило от 31 дБ до 37 дБ в зависимости от величины шага стальной сетки в блоке.
2) Если зондирующий импульс представляет собой 1…2 колебания, лучше говорить не о несущей частоте, а о средней частоте спектра сигнала. Однако, как будет видно далее, целесообразно применять импульсы, содержащие не менее 5...7 колебаний, т.е. с относительной шириной спектра не более (20…14)%. В этом случае уже можно использовать термин «несущая частота»

399
При выборе несущей частоты следует также учитывать нормативные документы по электро-
магнитной совместимости. Конечно, при спасательных работах в определенных ситуациях возможно нарушение требований электромагнитной совместимости. Однако мощное излучение СШП радиоло-
катора может создать помехи другим жизненно важным радиосистемам, а иногда и затруднит поиски живых людей под завалами (например, если не будут слышны сигналы сотовых телефонов из-под завалов). Хотя в России нет пока официального документа, относящегося к СШП устройствам, мож-
но ориентироваться на документ Федеральной комиссии связи (ФКС) США (Federal Communications Commission, FCC), вступивший в силу в апреле 2002 года [158]. Эта Комиссия установила, что СШП устройства для наблюдения через оптически непрозрачные преграды (“Through-wall Imaging UWB systems”) могут создаваться либо на частотах ниже 960 МГц, либо в диапазоне частот 1990 МГц
...10600 МГц. Подготавливаемые аналогичные документы других стран (Европейского союза, Кана-
ды, Австралии и др.) аналогичны [158], но в некоторых случаях сужают разрешенный диапазон ча-
стот (в частности, исключают диапазон от 1990 МГц до 3100 МГц) [169].
Учитывая изложенные выше соображения, можно, по-видимому, выбрать для дальнейшего анализа компромиссное значение несущей частоты f0 = 3500 МГц, так чтобы весь спектр СШП зон-
дирующего сигнала (на уровне 10 дБ от максимума) был выше частоты 3100 МГц. Конкретное зна-
чение f0 не оказывает сильного влияния на алгоритм обнаружения.
5.3.4. Синтез структуры обнаружителя полезных сигналов на фоне отражений от непо-
движных окружающих предметов
Постановка задачи и исходные соотношения
Для сокращения записи будем далее обозначать рассматриваемый радиолокатор как РЛС.
Пусть в соответствии с результатами раздела 3, РЛС излучает когерентную последовательность СШП радиоимпульсов3). Для удобства дальнейшего рассмотрения примем гауссовскую форму импульсов.
Периодическую последовательность зондирующих импульсов можно представить в следую-
щем виде:
3) Как показано в подразделе 5.3.7, с целью повышения энергетических характеристик РЛС, удовлетворяющих требованиям электромагнитной совместимости, целесообразна рандомизация периода повторения, разрушающая когерентность последовательности зондирующих импульсов. Однако при этом необходима жестко коррелированная рандомизация опорных импульсов в приемнике, обеспечивающая когерентную обработку принятых последовательностей. Здесь для простоты полагаем последовательности и зондирующих, и принятых импульсов когерентными.
400
|
|
( t kT |
)2 |
|
sизл ( t ) Aизл exp |
|
п |
exp[ j 0 ( t kTп )] , |
|
|
2 |
|||
k |
|
и |
|
|
(5.37)
где длительность импульса и определяется по уровню exp( /4) 0.46 от максимума, Aизл
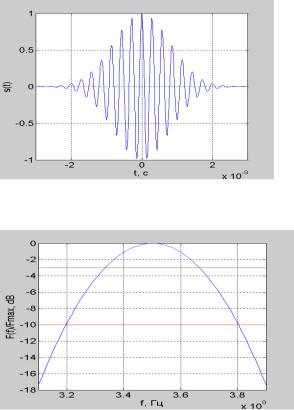
амплитуда сигнала, а Тп период повторения импульсов (Тп >> и). На рис. 5.45 показан зондиру-
ющий импульс длительностью и = 2 нс на несущей частоте f0 = 3500 МГц, а на рис. 5.46 спектр
этого импульса.
Рис. 5.45. Зондирующий импульс.
Рис.5.46. Спектр зондирующего импульса На вход приемника поступают эхосигналы от многих, в основном, мешающих отражателей.
Примем, что все отражатели в зоне действия РЛС можно считать «точечными» («блестящим точка-
ми»). Поскольку на частоте f0 = 3500 МГц импульс длительностью 2...3 нс содержит не менее 7...10
периодов несущей частоты, его форма мало меняется при излучении, распространении, отражении и приеме [142]. Тогда эхосигнал на входе приемника
|
|
|
|
( t kT )2 |
( t kT0 |
i |
) i ]} . |
(5.38) |
||
sпр ( t ) Ai exp |
2 |
i |
exp{ j[ 0 |
|||||||
|
|
|
|
0 |
|
|
|
|
|
|
i |
k |
|
|
и |
|
|
|
|
|
|