

Distantsionny_kontrol_psikhofiziologicheskogo_sostoyania_s_pomoschyu_sverkhshirokopolosnoy_RLS
.pdf271
водит, при необходимости, отображение сигнала контрольного кардиографа в дополнительном окне программы.
Рис. 4.94 Кривые, соответствующие движению, вызванному сердцем (на верху) и дыханием
(внизу).
2. Производит анализ сигнала радара в режиме стоп кадра с ручным выбором анализируемого временного интервала, а также автоматически подает сигнал тревоги при превышении регистрируе-
мыми параметрами заданной величины порога. Выполняет построение гистограмм выбранных харак-
теристик регистрируемого сигнала (рис. 4.95). На кривой сердцебиения, показанной на этом рисунке,
черным цветом выделены фрагменты, «забракованные» программой как недостоверные. Эти фраг-
менты отразили двигательную активность человека, что привело к высокому уровню помех, и, как следствие, к ошибкам измерения.
272
Рис. 4.95 Построение гистограммы кардиоинтервалов (снизу) анализируемой кривой сердцеби-
ения (сверху).
3. Получает количественную оценку реакции организма на изменение внешней обстановки в условных единицах (баллах) показателя активности регуляторных систем (ПАРС) по 10-балльной шкале оценок функционального состояния (ФС), апробированной при исследовании различных кон-
тингентов людей: космонавтов, спортсменов, пациентов с различными заболеваниями, здоровых лю-
дей разного возраста и пола. По этим оценкам выделяются пять основных групп состояний:
1. Норма. Состояние полной или достаточной уравновешенности организма с внешней средой.
Достаточные функциональные (адаптационные) возможности (резервы). Высокая (удовлетворитель-
ная) приспособляемость организма к текущим условиям достигается при минимальном напряжении регуляторных систем. ПАРС=0,1.
2. Умеренное функциональное напряжение. Состояние, при котором функции организма реали-
зуются более высоким, чем в норме, напряжением регуляторных систем. Возникают как результат высокой активности человека или после работы, к концу рабочего дня. Постоянное пребывание в этом состоянии указывает на то, что регуляторные механизмы работают с более высокой нагрузкой,
чем это должно быть в норме. ПАРС=2 - 4.
3. Выраженное функциональное напряжение. Состояние, которое характеризуется снижением функциональных резервов. Для здорового человека - состояние во время работы физической или ум-
ственной. Характерно для лиц со снижением функциональных возможностей системы кровообраще-
ния, с неудовлетворительной адаптацией организма к условиям окружающей среды. Наличие этого состояния в покое является признаком неадекватного ответа организма на воздействие факторов окружающей среды. Состояние постоянного стресса ведет к ускоренному расходованию жизненных ресурсов и к развитию заболеваний. ПАРС = 5,6.
4. Резко выраженное функциональное напряжение. Состояние неудовлетворительной адапта-
ции с резким снижением функциональных возможностей организма. Характеризуется наличием симптомов заболеваний. У здоровых людей может кратковременно возникать в моменты выполне-
ния больших нагрузок (например, у спортсменов) или ответственных заданий (космонавты, летчи-
273
ки). У пациентов с различными заболеваниями это состояние указывает на недостаточность функци-
ональных резервов, на истощение жизненных сил и требует серьезного отношения. ПАРС = 7,8.
5. Астенизация (истощение) регуляторных систем. Означает срыв адаптационных процессов,
истощение регуляторных систем, неспособность организма поддерживать равновесие с окружающей средой. Обострение патологического состояния требует немедленного применения средств коррек-
ции состояния в клинических условиях. ПАРС=9, 10.
Созданный СШП радар позволяет выполнять дистанционные бесконтактные измерения респи-
раторной, сердечной и двигательной активности человека на относительно большом расстоянии. При этом средняя мощность сигнала не превышает 50 мкВт. Короткие СШП импульсы позволяют создать малый по объему сектор измерения радара и практически исключить влияние движения других объ-
ектов вне этого сектора.
Главной особенностью таких систем, предъявляющих особые требования к условиям измере-
ния, является высокая чувствительность к движениям наблюдаемого объекта, что затрудняет измере-
ние дыхания и сердцебиения человека в моменты его двигательной активности.
При необходимости измерения физиологических параметров человека через материалы с боль-
шим поглощением электромагнитных волн (кирпичные, бетонные и железобетонные конструкции),
например, при поисках людей под развалинами и завалами, необходимо использовать зондирующие сигналы со спектром, расположенным в области более низких частот. Расчеты показывают возмож-
ность выполнения таких измерений при использовании зондирующего сигнала в диапазоне от 2 ГГц до 2.5 ГГц.
274
Зиганшин Э.Г., Иммореев И.Я., Фесенко М.В., Черненко А.И.
4.5. Использование сверхширокополосной РЛС для обнаружения людей в лесном
массиве
4.5.1. Введение.
В последние годы из-за увеличивающейся опасности терроризма все больший интерес проявля-
ется к обнаружению людей в лесных массивах и точного определения их координат с помощью ра-
диолокационных станций (РЛС).
В настоящей главе представлены результаты экспериментальных радиолокационных измерений по обнаружению людей в лесном массиве. Для проведения измерений использовалась сверхшироко-
полосная (СШП) РЛС, имеющая центральную частоту спектра сигнала около 1250 МГц и разрешаю-
щую способность по дальности 0.4 метра. Эта РЛС разрабатывалась для решения других задач и не оптимизирована для обнаружения людей в лесу. Однако полученные результаты позволяют оценить возможность обнаружения людей в лесном массиве и определения их координат с помощью СШП РЛС. С этой точки зрения полученные результаты представляют несомненный интерес.
4.5.2. СШП РЛС, которая была использована для измерений.
Функциональная схема СШП РЛС приведена на рис. 4.96.
РЛС выполнена по схеме радиолокационного доплеровского измерителя с раздельными пере-
дающей и приемной антеннами. В состав РЛС входят:
-антенна приемная;
-антенна передающая;
-плата передатчика;
-плата приемника;
-плата обработки сигнала;
-портативный компьютер;
-система питания.
Передающая и приемная антенны конструктивно одинаковы и имеют аналогичные техниче-
ские характеристики: ширину луча 300х300, коэффициент направленного действия равный 144 (рис.
4.97).

275
Рис. 4.96 Функциональная схема РЛС
Рис. 4.97 Приемная (передающая) антенна.
Рис. 4.98 Аппаратная часть РЛС Аппаратная часть РЛС представлена на рис. 4.98. Обработка сигнала в приемнике осуществля-
ется методом фазового детектирования с последующим усилением и оцифровкой результата с помо-
щью АЦП. Излучаемый сигнал и опорный сигнал для фазового детектора создаются одинаковыми формирователями импульсов. Последний задерживается в линии задержки относительно излучаемого
276
сигнала. Задержка обеспечивает работу РЛС в заданном стробе дальности. Работа всей схемы син-
хронизируется с помощью высокостабильного кварцевого генератора.
Данные из АЦП приемника поступают в программируемую логическую интегральную схему
(ПЛИС), расположенную на плате обработки сигнала и управления, где происходит первичная циф-
ровая обработка сигнала по алгоритму скользящего среднего с прореживанием результата накопле-
ния. Параметры обработки – длительность усреднения и коэффициент прореживания - устанавлива-
ются с помощью команд управления перед началом измерения. Обработанный сигнал из ПЛИС через микроконтроллер передается в портативный компьютер для дальнейшей обработки. Микроконтрол-
лер помимо передачи сигнала из ПЛИС осуществляет управление элементами платы приемника и передатчика (линиями задержки, усилителями, счетчиками, аттенюаторами) как самостоятельно,
осуществляя алгоритмы автоматической регулировки усиления или начальной инициализации, так и по командам, поступающим из портативного компьютера.
Генератор по синхроимпульсам приемника формирует сигнал зондирования, который излучает-
ся передающей антенной.
Система питания формирует набор питающих напряжений постоянного тока для электропита-
ния всех компонентов РЛС.
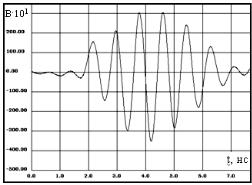
РЛС излучает зондирующий сигнал в виде короткого радиоимпульса с гауссовой огибающей и частотой заполнения 1250 МГц. Осциллограмма импульса изображена на рис. 4.99 (по вертикали от-
ложены вольты, умноженные на десять).
Как видно из рис. 4.99, импульс имеет длительность по уровню 0.1 порядка 5 нс. С учетом ко-
эффициента формы гауссова импульса (0.55 при соотношении длительности импульса по уровню 0.1
и по уровню 0.5) разрешающая способность по дальности такого импульса зондирования составляет порядка 0.4 м. Спектр мощности импульса зондирования представлен на рис. 4.100.

277
Рис. 4.99 Излучаемый импульс
Рис. 4.100 Спектр излучаемого импульса В табл. 4.2 приведены технические характеристики РЛС.
Таблица 4.2
Параметр |
Значение |
|
|
Пиковая мощность |
10 Вт |
|
|
Средняя мощность (при частоте повторения 400 кГц) |
8,4 мВт |
|
|
Полоса частот сигнала: |
|
|
1.17 – 1.32 ГГц |
- по уровню -3дБ |
|
|
1.05 – 1.41 ГГц |
- по уровню -10дБ |
|
|
|
Чувствительность приемника |
5 мкВ |
|
|
Динамический диапазон приемника |
72 дБ |
|
|
Максимальный уровень входного сигнала |
+17 дБм |
|
|
Минимальная дальность измерения |
20 м |
|
|
Максимальная дальность измерения (при площади объекта 0.5м2, скорости |
|
|
470 м |
объекта 6м/с, отношении сигнал/шум 20 дБ) |
|
|
|
Ширина диаграммы направленности антенн по уровню половинной мощно- |
|
|
300 |
сти в каждой из плоскостей |
|
|
|
Максимальное количество накапливаемых импульсов |
60 тыс. |
|
|
Максимальная частота повторения импульсов зондирования |
2 МГц |
|
|
Шаг изменения периода зондирования |
51 нс |
|
|
Шаг установки строба дальности |
3.75 см |
|
|

278
Разрешающая способность по дальности |
0.41 м |
|
|
Питающее напряжение |
~220В, 50Гц |
|
|
Потребляемая мощность в режиме измерения |
52 Вт |
|
|
Потребляемая мощность в режиме ожидания |
26 Вт |
|
|
4.5.3. Схема и методика эксперимента
Эксперимент проводился на краю лиственного лесного массива (рис. 4.101). Минимальное расстоя-
ние от РЛС до леса составляло 50 метров. Высота подъема передающей и приемной антенн составля-
ла 4.5 метра. На открытом пространстве перед лесным массивом располагались различные местные предметы: стройматериалы и строительные конструкции. Две зоны контроля, предназначенные для обнаружения людей, находились в лесном массиве (рис. 4.102). Одна зона располагалась на расстоя-
нии 75 метров от РЛС и в 25 метрах от опушки в глубине леса, другая – на расстоянии 100 метров от РЛС и в 50 метрах от опушки в глубине леса. На рис. 4.103 показан вид лесного массива из зоны кон-
троля, расположенной на расстоянии 75 метров от РЛС, в направлении на РЛС. Протяженность зон контроля по дальности определялась разрешающей способностью РЛС и составила 0,41 метра.
Рис. 4.101 Место проведения эксперимента Эксперименты проводились в условиях интенсивных осадков и сильного порывистого ветра.
Это определяло помеховый фон, который формировался отражениями от движущихся стволов дере-
вьев (преимущественно периодический характер), а также отражениями от листвы и кустарников
(преимущественно шумовой характер). Спектры, формируемые помеховым фоном и движениями че-
ловека, в значительной степени перекрываются.

279
Рис. 4.102 Зоны контроля РЛС
Рис. 4.103 Обзор из зоны контроля (75 метров) в направлении на РЛС Для определения возможности обнаружения людей в лесном массиве были выбраны два чело-
века разной комплекции. Измерения проводились при пересечении этими людьми зоны контроля по следующим схемам:
1. Два человека двигаются в одном направлении с интервалом ~4 м и пересекают зону контроля, рас-
положенную на расстоянии 75 м от РЛС.
2. Два человека бегут в одном направлении и пересекают зону контроля, расположенную на расстоя-
нии 75 м от РЛС.
3. Два человека двигаются в одном направлении с интервалом ~1 м и пересекают зону контроля, рас-
положенную на расстоянии 75 м от РЛС.
4.Один человек пересекает зону контроля, расположенную на расстоянии 100 м от РЛС.
5.Один человек пересекает зону контроля, расположенную на расстоянии 100 м от РЛС, в прямом, а
затем в обратном направлении.
6.Один человек пересекает зону контроля, расположенную на расстоянии 100 м от РЛС, располага-
ясь на расстоянии 2 метров от затеняющего его дерева диаметром около 60 см (рис. 3.104).
280
Рис. 4.104 Обзор из зоны контроля (100 метров) в направлении на РЛС (дерево, создающее оп-
тическую тень).
В составе принимаемого сигнала имеется много интенсивных высокочастотных помеховых со-
ставляющих. Поэтому в приемнике РЛС выполнена первичная обработка принятых сигналов, заклю-
чающаяся в полосовой фильтрации этих составляющих. 4.5.4. Результаты эксперимента
В данном разделе представлены результаты экспериментов по обнаружению людей в лесном массиве и определению их координат. Эксперимент проводился в соответствии с методикой, указан-
ной в предыдущем разделе.
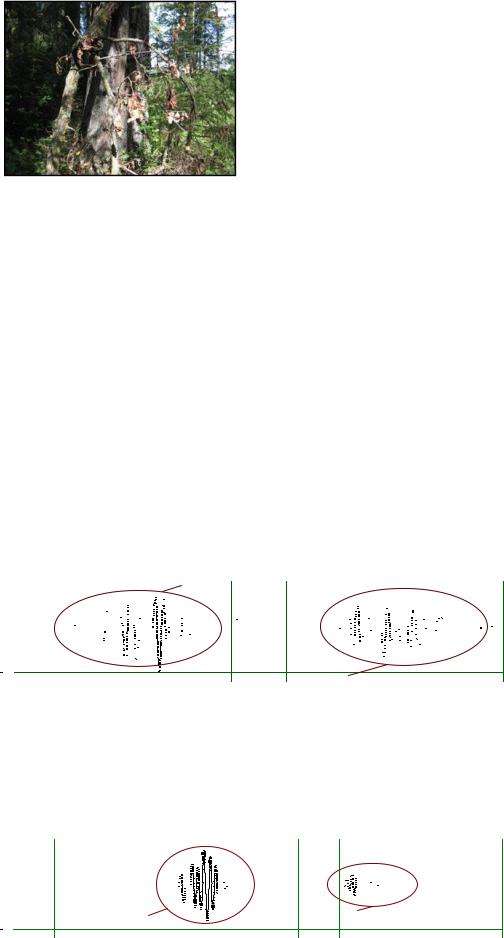
1. Два человека двигаются в одном направлении с интервалом ~ 4 м. и пересекают зону контроля,
расположенную на расстоянии 75 м. от РЛС.
|
|
50 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Отраженный сигнал от |
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
первого человека |
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
sunn |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Отраженный сигнал |
от |
|
|
|
|
|
|
50 |
|
|
|
|
|
|
|
второго человека |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|||||
|
|
|
|
|
|
|
|
|
|
|
n dt |
|
|
|
|
|
Рис. 4.105 Принятый сигнал.
2. Два человека бегут в одном направлении и пересекают зону контроля, расположенную на расстоя-
нии 75 м. от РЛС.
|
|
50 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
sunn |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Отраженный |
сигнал |
от |
|
|
|
|
|
Отраженный |
сигнал от |
|
|
|
|
|
||||
|
|
50 |
первого |
человека |
|
|
|
|
|
|
|
второго человека |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
0.5 |
1 |
1.5 |
2 |
2.5 |
3 |
3.5 |
4 |
4.5 |
5 |
5.5 |
6 |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
n dt |
|
|
|
|
|
|
|
|
|
|