

Distantsionny_kontrol_psikhofiziologicheskogo_sostoyania_s_pomoschyu_sverkhshirokopolosnoy_RLS
.pdf191
Однако в этом случае СШП РЛС переходит в разряд сложных и дорогих систем, технология которых в настоящее время разработана недостаточно.
Поэтому в настоящее время наиболее реальным путем использования СШП технологии в ра-
диолокации является создание относительно маломощных доплеровских РЛС, работающих на ди-
станциях в единицы и десятки метров. Такие РЛС находят самое широкое применение в различных областях человеческой деятельности, где требуется высокая точность дистанционного наблюдения за движущимися объектами на небольших расстояниях. Одной из таких областей является медицина,
где применение СШП РЛС для дистанционного измерения параметров сердечной и дыхательной дея-
тельности человека позволяет в клиниках или ожоговых центрах вести круглосуточный бесконтакт-
ный контроль состояния пациентов, а в домашних условиях - осуществлять самостоятельную перио-
дическую проверку параметров организма с последующей передачей полученных данных по теле-
фонным сетям в центры контроля жизнедеятельности для диагностики и принятия необходимых мер.
Ниже рассмотрены особенности построения РЛС такого типа, их применение для медицинских целей и возможность выполнения ими необходимых для этого функций.
4.1.2. Особенности построения СШП РЛС
Функционирование доплеровской СШП РЛС, также как и традиционных, узкополосных допле-
ровских РЛС, основано на отражении электромагнитных волн от объекта, образующего раздел двух сред, имеющих разные параметры, и на изменении параметров сигнала, отраженного от движущегося объекта. Однако при этом построение СШП РЛС имеет свои особенности, которые связаны, в основ-
ном, с существенным уменьшением длительности сигнала по сравнению с традиционными, узкопо-
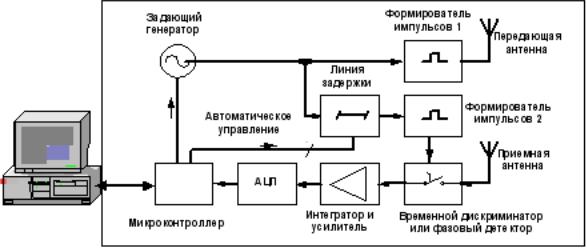
лосными РЛС. Рассмотрим эти особенности, используя упрощенную функциональную схему допле-
ровской СШП РЛС (рис. 4.1).
192
Рис. 4.1. Упрощенная функциональная схема СШП РЛС.
Выбор вида СШП сигнала.
Возможно построение двух типов СШП РЛС, отличающихся методами формирования излучае-
мых сигналов и, соответственно, методами их приема.
В первом типе РЛС задающий генератор формирует высокостабильные видеоимпульсы отно-
сительно большой длительности (порядка микросекунды), частота следования которых определяет период повторения сигналов, излучаемых РЛС. По переднему фронту этих импульсов первый фор-
мирователь вырабатывает короткие видеоимпульсы, длительностью τформ от одной до нескольких наносекунд, которые производят ударное возбуждение передающей антенны. Форма электромагнит-
ного поля, излучаемого при этом антенной, является производной формы тока, возбуждающего ан-
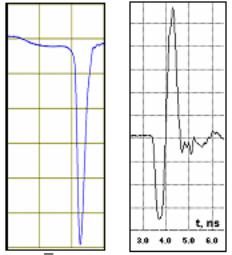
тенну. Поскольку форма этого тока всегда имеет нарастающий и ниспадающий участки, то есть участки с положительной и отрицательной производной, форма электромагнитного поля всегда имеет положительную и отрицательную составляющую. На рис. 4.2 приведен пример импульса тока, воз-
буждающего антенну, и сформированного им импульса поля в дальней зоне антенны в виде его про-
изводной. СШП РЛС, использующие этот метод формирования сигналов, в литературе часто назы-
вают видеоимпульсными.
193
Рис. 4.2. Пример видеоимпульсного возбуждения антенны.
В приемной части РЛС сигнал задающего генератора через управляемую линию задержки с временем задержки τзад подается во второй формирователь, короткий импульс которого (строб) от-
крывает окно временного дискриминатора для приема сигнала. Время задержки τзад определяет даль-
ность до рабочей зоны РЛС, а длительность строба τстр - ширину рабочей зоны РЛС по дальности.
Принятый сигнал усиливается и, при необходимости, накапливается в интегрирующем усилителе,
после чего поступает в АЦП, преобразуется в цифровой код и передается для первичной обработки в микроконтроллер и для окончательной обработки в компьютер.
Во втором типе РЛС задающий генератор формирует высокостабильное непрерывное колеба-
ние на рабочей частоте РЛС. Первый формирователь, который является быстродействующим клю-
чом, вырезает из этого колебания короткие радиоимпульсы, длительностью также от одной до не-
скольких наносекунд, которые поступают в передающую антенну РЛС и излучаются ею.
В приемном тракте РЛС вместо временного дискриминатора стоит фазовый детектор. Колеба-
ние задающего генератора через управляемую линию задержки с временем задержки τзад подается во второй формирователь (ключ), который вырезает из этого колебания короткие радиоимпульсы, дли-
тельностью также от одной до нескольких наносекунд, являющиеся опорным сигналом фазового де-
тектора. Время задержки τзад и длительность опорного импульса τоп также определяют дальность и ширину рабочей зоны РЛС. Дальнейшая обработка производится так же, как в первом типе РЛС.
Рассмотрим особенности работы СШП РЛС этих двух типов.
СШП РЛС первого типа имеет наиболее простое и недорогое схемное решение. Как было ука-
зано выше, излучение в этой РЛС происходит при возбуждении антенны короткими видеоимпульса-

194
ми. Однако следует отметить, что некоторые типы антенн, используемые для излучения СШП сигна-
лов, являются «потомками» традиционных, узкополосных антенн и не всегда обладают достаточной широкополосностью. Поэтому при ударном возбуждении коротким видеоимпульсом такие антенны излучают радиоимпульс, длительность которого τизл превышает, и иногда значительно, длительность импульса формирователя τформ, возбуждающего антенну (пример такого импульса показан на рис.
4.3). Длительность и частота заполнения этого радиоимпульса определяется конструкцией антенны и параметрами возбуждающего ее видеоимпульса. Очевидно, что разрешающая способность РЛС по дальности в этом случае будет определяться длительностью излученного радиоимпульса τизл (или шириной его амплитудно-частотного спектра), а не длительностью видеоимпульса, возбуждающего антенну.
Рис. 4.3. Пример излученного радиоимпульса.
Определим оптимальную длительность строба τстр, открывающего окно временного дискрими-
натора, и его оптимальное положение относительно принятого сигнала (оптимальное τзад) для РЛС первого типа.
С одной стороны, уменьшение длительности строба τстр снижает уровень отражений от непо-
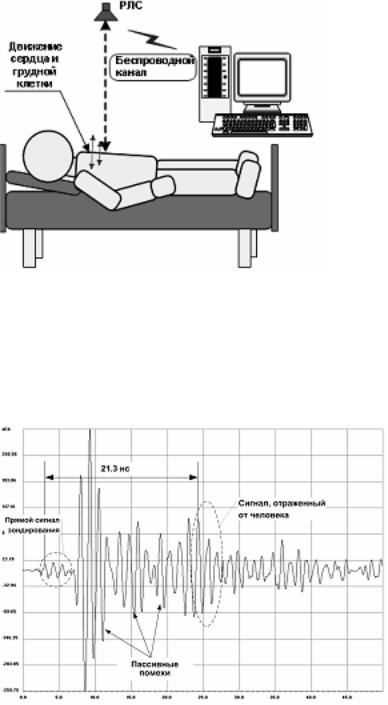
движных объектов и повышает устойчивость РЛС к их воздействию. Это очень важно для РЛС, при-
меняемых в медицинских целях, поскольку их работа происходит в условиях больничного помеще-
ния (рис. 4.4), как правило, при высоком уровне пассивных помех – сигналов, отраженных от стен помещения и неподвижных объектов, – маскирующих полезный сигнал. На рис. 4.5 показан типич-
ный вид такого сигнала на входе РЛС.
195
Рис. 4.4. Схема работы РЛС в помещении С другой стороны уменьшение длительности строба τстр приводит к исключению из обработки
части сигнала, отраженного от объекта (подобного показанному на рис. 4.3), что эквивалентно до-
полнительным потерям при обработке, и снижению дальности действия РЛС.
Рис. 4.5. Типичный сигнал на входе РЛС, при работе в помещении.
Для выбора формы и длительности строба рассмотрим типичный случай.
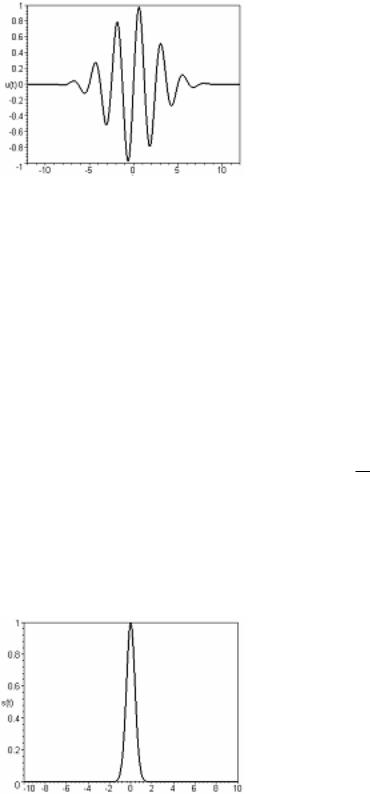
На вход приемника РЛС поступает короткий радиоимпульс с Гауссовой огибающей (рис. 4.6):
|
|
|
|
t2 |
|
|
|
|
|
|
u t E |
|
|
2 |
|
|
|
t |
|
||
|
|
2 |
|
|
||||||
м |
e |
|
|
|
sin |
2 |
|
|
, (1) где: Eм – амплитуда импульса, |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Tс |
|
|
– длительность импульса по уровню 0.606 от Eм, Tс – период высокочастотного заполнения.
196
Рис. 4.6. Принятый импульс ( EМ 1; 5.38 ; TС 2.5 )
В качестве стробирующего сигнала примем видеоимпульс с Гауссовой огибающей (рис. 4.7):
|
|
|
2 |
t2 |
|
|
s(t) E |
стр |
e |
стр , |
|||
|
||||||
|
|
|
|
|
||
где: Eстр – амплитуда строба;
стр – длительность строба по уровню 0.606 от Eстр.
Тогда энергия сигнала, выделяющаяся на нагрузке R
|
|
|
|
|
|
|
|
|
|
|
|
|
E E |
|
|
|
t |
2 |
|
|
|
2 |
t 2 |
|
||||||
|
|
1 |
|
|
u t s t dt |
|
|
e |
2 |
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
2 |
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
м |
|
стр |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
W |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
e |
|
стр sin |
||||||||||||
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
2 |
|
|
t |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Eм Eстр |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
стр |
стр |
|
|
|
t |
|
|
|
|
|
|||||||||||||||||
|
|
e |
|
|
|
|
|
|
|
|
|
|
dt 0 . |
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
sin 2 |
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
с |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 4.7. Импульс стробирования ( Eстр 1; 0.8)
интегратора (фильтра нижних частот):
2 t dt T
с
(4.1)
Энергия, выделяющаяся в нагрузке интегратора, в данном случае равна нулю из-за выбранного расположения строба относительно принятого импульса: максимум строба совпал с нулем импульса.
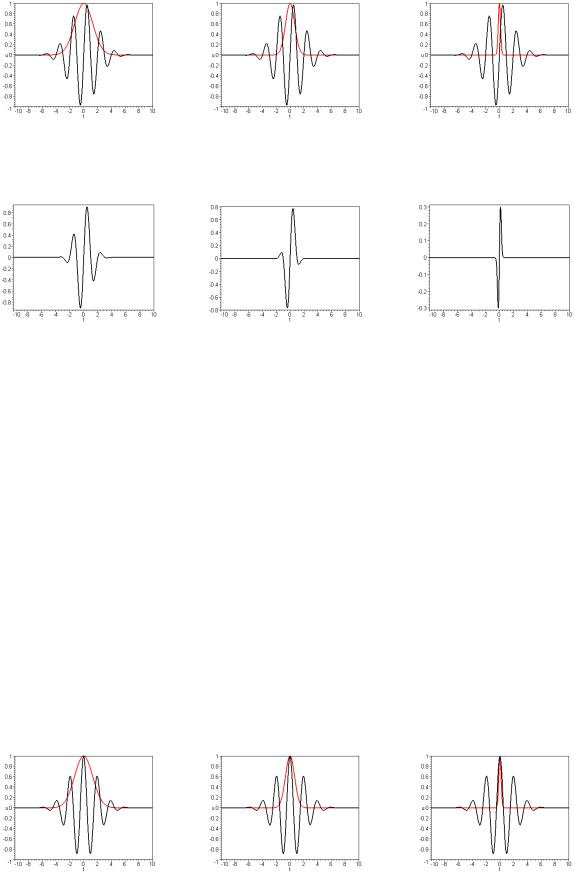
Из диаграмм на рис. 4.8 видно, что импульс, поступающий в нагрузку интегратора после стробирова-
197
ния, при любой длительности строба имеет симметричную форму относительно оси времени и, в ре-
зультате интегрирования, полностью компенсируется.
а) Расположение принятого им- |
в) Расположение принятого им- |
д) Расположение принятого им- |
пульса и строба при стр = 2Tс |
пульса и строба при стр = Tс |
пульса и строба при стр = 2Tс/4 |
б) Импульс на входе интегратора |
г) Импульс на входе интегратора |
е) Импульс на входе интегратора |
при стр = 2Tс |
при стр = Tс |
при стр = Tс/4 |
Рис. 4.8 Расположение входного сигнала и строба при совпадении максимума строба с нулем сигнала.
Данный случай наиболее благоприятен для обнаружения движущихся целей на фоне пассивных помех, поскольку сигналы, отраженные от неподвижных предметов, на выходе интегратора будут равны нулю и не требуют последующей фильтрации.
При изменении взаимного расположения строба и принятого импульса энергия, выделяющаяся в нагрузке интегратора, будет изменяться по гармоническому закону и станет максимальной, когда максимум принятого импульса и максимум строба совпадут. Рассмотрим этот случай и оценим для него потери, возникающие при стробировании. Для этого сместим фазу принятого импульса на 90 ,
заменив в формуле (4.1) Sin на Cos. На рис. 4.9 показано расположение принятого импульса и строба в этом случае.

198
а) Расположение принятого им- |
в) Расположение принятого им- |
д) Расположение принятого им- |
пульса и строба при стр = 2Tс |
пульса и строба при стр = Tс |
пульса и строба при стр = 2Tс/4 |
б) Импульс на входе интегратора |
г) Импульс на входе интегратора |
е) Импульс на входе интегратора |
при стр = 2Tс |
при стр = Tс |
при стр = Tс/4 |
Рис. 4.9. Расположение входного сигнала и строба при совпадении максимума строба с макси-
мумом сигнала; а) Расположение принятого импульса и строба при стр = 2Tс; б) Импульс на входе
интегратора при стр = 2Tс; в) Расположение принятого импульса и строба при стр = Tс; г) Импульс
на входе интегратора при стр = Tс; д) Расположение принятого импульса и строба при стр = 2Tс/4; е)
Импульс на входе интегратора при стр = Tс/4.
Из рис. 4.9 видно, что импульс на входе интегратора теряет свою симметрию относительно оси времени, что приводит к выделению энергии в нагрузке интегратора. В тоже время очевидно, что расширение строба за пределы одного периода принятого импульса не увеличивает энергию, выде-
ляющуюся в нагрузке, поскольку при этом у импульса, приходящего на вход интегратора и опреде-
ляющего эту энергию, растет число полупериодов, имеющих разный знак и компенсирующихся при интегрировании. Энергия, выделяющаяся на нагрузке, равна:
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
W |
u t s t dt |
||||||||||
|
|
|
R |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
2 |
2 |
|
t |
2 |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
||
|
E |
|
E |
|
|
стр |
стр |
|
|
|||||
|
м |
стр |
|
|
|
|
|
|
||||||
|
|
|
e |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|||||
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
E |
E |
|
|
|
2 |
t |
2 |
2 |
t 2 |
|
|
|
t |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
м стр |
|
e |
|
|
e |
|
стр cos |
2 |
|
|
|
dt |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
с |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
стр 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
t |
|
|
|
|
|
EмEстр |
|
стр |
|
2 |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
2 2 стр2 Tс2 |
||||||||||||||||
cos |
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
e |
|
(4.2) |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
Tс |
|
|
|
|
2R |
|
|
2 2 |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
стр |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
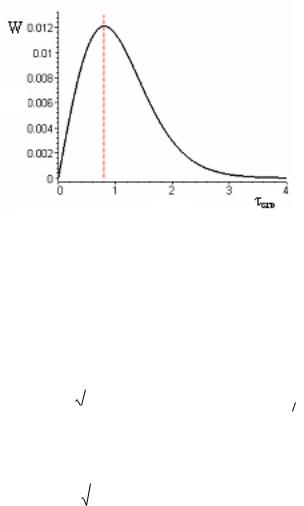
Зависимость энергии сигнала, выделяющейся в нагрузке, от длительности строба приведена на
рис. 4.10. Эта функция имеет максимум.
199
Рис. 4.10. Зависимость энергии, выделяемой в нагрузке, от длительности строба (Eм = 1; Eстр = 1;
= 5.38; Tс = 2,5; R = 50)
Определим значение длительности строба, соответствующее этому максимуму. Для этого про-
дифференцируем (4.2) по стр и приравняем полученное выражение нулю:
|
|
|
|
|
|
|
2 |
|
|
|
|
2 |
|
2 |
|
|
|
2 |
|
|
dW |
3 |
|
|
EмEстр |
стр |
Tс стр |
|
Tс |
|
exp |
стр |
|
|
|||||||
2 |
|
0 . |
||||||||||||||||||
d |
|
2R |
|
|
|
|
|
|
|
2T2 |
2 |
2 |
|
|||||||
стр |
|
|
|
T |
2 |
|
2 |
|
2 |
5 2 |
|
|
|
|||||||
|
|
|
|
|
|
|
стр |
|
|
|
с |
|
стр |
|
|
|||||
|
|
|
|
|
|
с |
|
|
|
|
|
|
|
|
|
|
|
|
||
Решая полученное уравнение относительно τстр, получим корни этого уравнения:
|
|
|
|
|
|
|
макс T |
|
2 Tс2 |
|
, |
(4.3) |
|
Tс2 2 |
|
|||||
стр |
с |
|
|
|
||
|
|
|
|
|
||
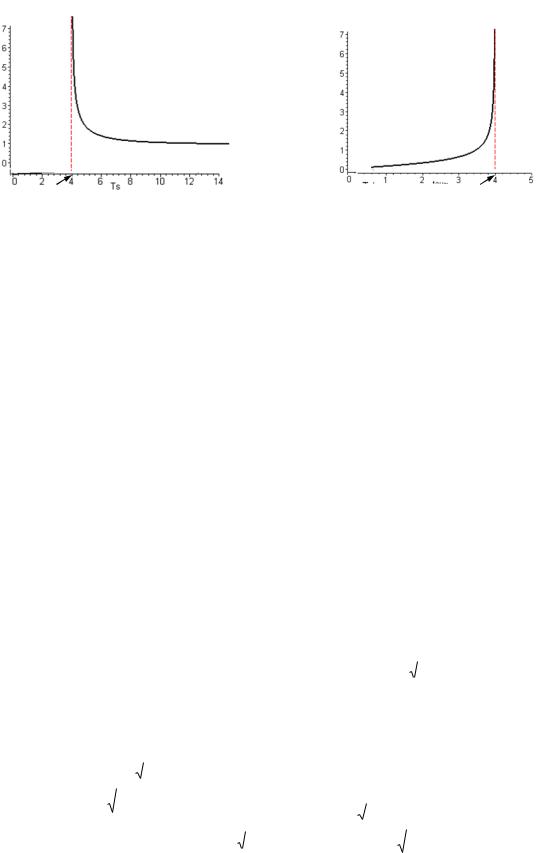
Полученная длительность строба зависит от двух параметров принятого импульса: его длитель-
ности τ и периода высокочастотного заполнения Тс. Используем положительный корень уравнения
(4.3) и построим зависимости длительности строба от каждого из этих параметров при фиксирован-
ном другом (рис. 4.11а и 4.11б).
Из рис. 4.11а видно, что при увеличении длительности принятого импульса длительность стро-
ба практически не влияет на величину энергии, выделяемой в нагрузке. Вместе с тем, увеличение длительности принимаемого сигнала (при неизменной частоте заполнения) приводит к пропорцио-
нальному увеличению энергетических потерь на обработку. Из рисунка 4.11б видно, что длитель-
ность строба, позволяющая получить максимальную энергию в нагрузке, практически линейно зави-
сит от периода высокочастотного заполнения.
200
|
макс |
макс |
||
стр |
||||
стр |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
τ |
|
|
|
|
|
|
τ |
Тс |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
Тс |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
||||||
Рис. 4.11а Зависимость длительности строба |
Рис. 4.11б Зависимость длительности строба |
||||||||||||||
макс от длительности принятого импульса при |
макс от периода высокочастотного заполнения |
||||||||||||||
стр |
стр |
|
|
||||||||||||
|
|
Tс = 4 |
|
|
Тс при = 4 |
|
|
||||||||
Проведенный анализ позволяет утверждать, что при использовании в качестве строба видеоим-
пульса с Гауссовой огибающей, с энергетической точки зрения наиболее выгоден случай, когда дли-
тельность строба стр равна длительности принятого сигнала , а сам принятый сигнал представляет собой один период высокочастотного заполнения Tс (моноволна).
Использование видеоимпульсного строба для обработки радиоимпульсного сигнала не является оптимальным с точки зрения извлечения максимально возможной энергии из принятого сигнала. По-
этому такая система обработки обладает потерями. Для оценки этих потерь рассмотрим отношение:
|
|
|
|
W |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
dB 10 log |
|
|
|
|
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(4.4) |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
WП |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
где WП является полной энергией сигнала, которую найдем, используя (4.1): |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t2 |
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
2 |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
W |
|
|
u(t)2 dt |
|
E |
|
|
e |
|
|
sin |
2 |
|
|
dt |
|
Eм |
|
1 e |
Tс |
|
|
|
|
|
|
|
|
|
|
|
(4.5) |
||||||||||||||||||||||||
|
|
|
м |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
П |
R |
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
0 |
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
Tс |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Подставляя выражения (3.2) и (3.5) в (3.4), получим: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
Eм Eстр |
|
|
|
|
|
|
|
|
|
|
|
0 стр 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
||||||||||||||||||||
|
|
|
|
|
стр 2 |
exp |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Eстр стр exp |
|
0 |
|
стр |
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
8 |
2 стр2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
2R |
|
|
|
|
|
2 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
8 2 |
2 |
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
стр |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
стр |
|
|
|
|
||||
10log |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10 log 2 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|||||||||||||||
|
|
|
|
|
E2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
2 |
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
м |
|
1 exp |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Eм |
|
|
|
стр |
exp |
|
0 |
|
|
|
1 |
|
||||||||||||||||||
|
|
|
|
4R |
|
2 |
|
|
|
|
|
|
|
2 |
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Зависимость потерь при обработке от длительности строба показана на рис. 4.12.