

Учебное пособие 800360
.pdf6.3. Сложение вращений тела вокруг двух параллельных осей
Пусть относительное движение тела является вращением с угловой скоростью1 вокруг оси aa , укрепленной на кривошипе ba (рис. 6.1, а), а переносное - вращением кривошипа bа вокруг оси bb , параллельной aa , с
Рис. 6.1 угловой скоростью2 . Тогда движение тела будет плоскопараллельным в плоскости, перпендикуляр-
ной к указанным осям. При этом возможны три частных случая.
6.3.1. Вращения направлены в одну сторону
Пусть (S) - сечение тела плоскостью, перпендикулярной осям вращения (рис. 6.1, б). Пусть А и В проекции осей на сечение (S). Очевидно, что точка А, лежащая на оси Aa , получит скорость только от вращения вокруг оси Bb , следовательно, vA 2 AB. Точно так же vB 1 AB. При этом векторы vA и vB будут параллельны друг другу (оба перпендикулярны АВ) и направлены в противоположные стороны. Тогда точка С
(см. 3.2) будет мгновенным центром скоростей (vC |
= 0), а сле- |
||||||||||
довательно, ось |
Cc |
|
, параллельная осям aa |
|
|
||||||
|
и |
bb , будет |
|||||||||
мгновенной осью вращения тела. |
|
|
|
|
|||||||
Тогда |
|
1 |
2 , |
|
|
|
(6.1) |
||||
|
|
|
|
|
|||||||
|
|
|
1 |
|
|
2 |
|
|
. |
|
(6.2) |
|
|
|
|
|
|
|
|
||||
|
|
|
BC |
AC |
AB |
|
|
||||
С течением времени мгновенная ось вращения Cc будет менять свое положение, описывая цилиндрическую поверх-
40

ность.
Рис. 6.2
6.3.2. Вращения направлены в разные стороны
Пусть для определенности,1 2 . Тогда, рассуждая, как в предыдущем случае, получим, что модули линейных скоростей точек А и В будут равны: vA 2 AB, vB 1 AB. Векторы скоростей vA и vB будут параллельны друг другу и направлены в одну сторону. Тогда мгновенная ось вращения проходит через точку С (рис. 6.2), и
1 2 , |
(6.3) |
|||||
1 |
|
2 |
|
|
. |
(6.4) |
BC |
AC |
|
||||
|
|
AB |
|
|||
Итак, в этом случае результирующее движение также является мгновенным вращением с абсолютной угловой скоростью 1 2 (при условии 1 2 ) вокруг оси Cc , положение которой определяется пропорцией (6.4). Вектор суммарной угловой скорости тела также можно определять по
формуле 1 2 .
Полученные результаты показывают, что векторы угловых скоростей тела, вращающегося вокруг параллельных осей, складываются независимо от их направлений этих скоростей.
6.3.3. Пара вращений Рассмотрим частный случай, когда угловые скорости тела
вокруг параллельных осей направлены в разные стороны (рис. 6.3), а модули угловых скоростей равны 1 2 . Такая сово-
купность вращений называется парой вращений, а векторы 1
и 2 , образуют пару угловых скоростей. В этом случае по-
41

лучаем, что vA 2 AB, vB 1 AB, и vA =vB . Тогда мгновенный центр скоростей тела будет находиться в бесконечности и все точки тела в данный момент будут иметь одинаковые скоро-
сти v 1 AB.
Следовательно, результирующее движение тела будет поступательным (или мгновенно поступательным) движением со скоростью v , величина которой равна 1 AB, а направление
перпендикулярно плоскости, проходящей через векторы 1 и
2 . Направление вектора v определяется по правилу правого винта, то есть пара вращений эквивалентна поступательному (или мгновенно поступательному) движению со скоростью v , равной моменту пары угловых скоростей этих вращений.
6.4. Сложение вращений тела вокруг пересекающихся осей Пусть относительным движением тела 1 (рис. 6.4) являет-
ся вращение с угловой скоростью 1, во-
круг оси a1a, укрепленной на кривошипе 2, а переносным является вращение кривошипа с угловой скоростью 2 вокруг оси b1b, которая с осью a1a пересекается в точке О. Схема сложения вращений в таком случае движения тела вокруг пересекающихся осей показана на рис. 6.4.
Очевидно, что в этом случае скорость точки О, как лежащей одновременно на обеих осях, будет равна нулю. Поэтому,
результирующее движение тела является движением вокруг неподвижной точки О. Следовательно, при сложении вращений вокруг двух осей, пересекающихся в точке О, результи-
42
рующее движение тела будет мгновенным вращением вокруг оси Ос (рис. 6.4), проходящей через точку О. Вектор угловой скорости этого вращения равен векторной сумме относительной и переносной угловых скоростей. Мгновенная ось вращения Ос направлена вдоль вектора , т. е. по диагонали параллелограмма, построенного на векторах 1 и 2
1 2 . |
(6.5) |
С течением времени положение оси Ос меняется и в пространстве и относительно тела, описывая коническую поверхность, вершина которой находится в точке О.
Если тело участвует одновременно в n независимых вращениях вокруг n осей, пересекающихся в точке О, то, последовательно применяя равенство (6.5), получим, что результирующее движение является мгновенным вращением вокруг оси, проходящей через точку О, а угловая скорость этого движения
1 2 n . |
(6.6) |
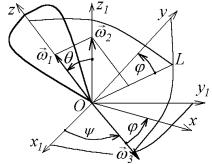
6.5. Кинематические уравнения Эйлера Пользуясь результатами предыдущего параграфа, найдем
угловую скорость тела, движущегося вокруг неподвижной точки О, если это движение задано уравнениями (4.1).
На рис. 6.5 указаны оси неподвижной Ox1 y1z1 системы координат K1, оси Oxyz системы K , жестко связанной с телом и движущейся вместе с ним, и углы Эйлера , и . При
изменении углов , и |
|
тело |
вращается |
вокруг осей |
||||||||
Oz,Oz1 и OK с угловыми скоростями 1, |
2 , |
3 соответст- |
||||||||||
венно. Модули этих угловых скоростей |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
||||||
1 |
, 2 |
|
, 3 |
|
|
|
. |
|
|
(6.7) |
||
|
|
|
|
|
||||||||
Тогда по формуле (6.6) угловая скорость тела в данный |
||||||||||||
момент времени |
|
|
|
|
|
|
|
|
|
|
||
1 2 3 . |
|
|
|
|
|
|
(6.8) |
|||||
Можно доказать, что |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
43 |
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
sin sin cos , |
|
|||
y |
|
|
|
(6.9) |
|
||||
sin cos sin , |
||||
|
|
|
|
|
|
|
|
||
|
z cos . |
|
||
Соотношения (6.9) называются кинематическими уравнениями Эйлера. Они определяют проекции вектора угловой скорости тела на подвижные оси системы Oxyz , связанные с телом, через углы Эйлера, то есть определяют положение мгновенной оси вращения тела. Для использо-
Рис. 6.5
вания (6.9) необходимо по
уравнениям (4.1) движения тела, выражающим зависимости углов Эйлера от времени, определить соответствующие производные.
44
Глава 7. ОСНОВНЫЕ СВЕДЕНИЯ О СТАТИКЕ ТВЕРДОГО ТЕЛА
7.1. Силы и системы сил Абсолютно твердым телом называют тело, расстояния ме-
жду точками которого остаются при всевозможных воздействиях на тело неизменными. Далее такое тело будет называться просто телом.
Реальные тела являются деформируемыми. Деформацией твердого тела называется изменения расстояний между точками твердого тела, или изменения углов между отрезками, проходящими через точки тела под воздействием некоторых причин.
В теоретической механике рассматривается равновесие и движение абсолютно твердых тел.
Если некоторое тело рассматривается изолированно от других тел, то их действие на это тело заменяется силами или моментами, которые называются внешними силами или моментами или нагрузками.
Если тело находится в некотором силовом поле (гравитационном, электрическом, электромагнитном), то действие поля на тело также заменяется соответствующей силой.
Кроме сил в статике рассматриваются моменты сил, характеризующие вращательное действие сил.
Сила и момент силы являются векторными величинами, характеризующими взаимодействие тел или действие полей на тела или материальные точки.
Сила характеризуется величиной (модулем), направлением, точкой приложения к телу. Можно доказать, что сила, приложенная к абсолютно твердому телу, является скользящим вектором, то есть такую силу можно переносить вдоль линии ее действия из одной точки тела в любую другую точку того же тела, не изменяя ее действия силы на тело.
Силу, как и другие векторные величины, изображают направленным отрезком. Все действия с силами выполняются по правилам векторной алгебры.
45
Системой сил называют совокупность нескольких сил, приложенных к материальной точке или телу.
Если точка или абсолютно твердое тело под действием системы сил находится в равновесии, то такую систему сил называют эквивалентной нулю или уравновешенной. Именно такие системы сил и рассматриваются в статике.
Система сил называется плоской, если все силы системы расположены в одной плоскости. В противном случае система сил является пространственной.
Система сил называется сходящейся, если линии действия входящих в нее сил пересекаются в одной точке.
Сходящиеся системы сил могут быть плоскими и пространственными.
7.2.Аксиомы статики
Воснову статики положено несколько аксиом, которые получены в результате многочисленных наблюдений и научных обобщений.
Аксиома первая (закон инерции)
Всякая изолированная материальная точка находится в равновесии или инерциальном движении, пока какая - либо причина не выведет ее из этого состояния.
Система материальных точек находится в равновесии, если находятся в равновесии все точки системы.
Статика изучает условия равновесия точек и систем материальных точек. Поэтому в задачах статики встречаются как покоящиеся тела, так и тела, совершающее инерциальное движение.
Аксиома вторая Если две силы действуют на некоторое твердое тело, то
они могут уравновесить друг друга только в том случае, если они направлены противоположно друг другу вдоль прямой, проходящей через точки приложения их к телу.
46
Аксиома третья Действие системы сил на абсолютно твердое тело не ме-
няется от приложения или исключения уравновешенной системы сил. Использование этой аксиомы позволяет доказать возможность переноса силы, приложенной к абсолютно твердому телу, из одной точки тела в другую вдоль линии действия силы.
При определении внутренних сил или деформаций в твердом деформируемом теле переносить точку приложения силы вдоль её линии действия нельзя.
Сложением сил называют замену данной системы сил системой, эквивалентной данной системе сил.
Равнодействующей системы сил называют силу, действие которой заменяет собой действие данной системы сил. Силу, образующую с равнодействующей уравновешенную систему сил, называют уравновешивающей силой. Замену одной силы несколькими силами, в сумме равными этой силе, называют разложением данной силы на составляющие.
Аксиома четвертая (правило параллелограмма) Равнодействующая двух сил, приложенных в одной точ-
ке, приложена в той же точке и равна по величине и направлению диагонали параллелограмма, построенного на этих силах, как на сторонах. Правило параллелограмма используется и при сложении сил, и при разложении силы на составляющие.
Аксиома пятая (закон действия и противодействия)
Две материальные точки действуют друг на друга силами, имеющими равные модули, и направленными противоположно друг другу вдоль прямой, соединяющей эти точки. Теорема распространяется на системы материальных точек, например на твердые тела. Из аксиомы пятой не следует делать вывод, что действие уравновешивается противодействием на том основании, что обе силы, как в аксиоме второй, направлены по одной прямой в противоположные стороны и равны по модулю. Дело в том, что в аксиоме второй рассматриваются
47
две силы, приложенные к одному телу, находящемуся в равновесии. В аксиоме пятой же рассматриваются две силы, приложенные к разным телам, не обязательно находящимся в равновесии.
Ньютон сформулировал пятую аксиому (третий закон): действие всегда равно и прямо противоположно противодействию, т. е. действия тел друг на друга всегда равны между собой, а их направления противоположны. Здесь следует предостеречь от неправильного понимания второй формулировки аксиомы. Например, топор, рубя дрова, остается целым, а поленья раскалываются на части. Следовательно, равенство действия и противодействия нельзя распространять на перемещения, скорости, ускорения, деформации тел или сохранение их целостности.
Аксиома шестая Изменяемой системой материальных точек называют та-
кую совокупность точек, в которой расстояния между точками системы могут изменяться.
Равновесие изменяемой системы материальных точек под действием некоторой системы сил, не нарушится, если система станет неизменяемой. Деформируемое тело является изменяемой системой материальных точек. Аксиома шестая применительно к деформируемому телу называется принципом отвердевания: если деформируемое тело находится в равновесии под действием некоторой системы сил, то равновесие тела не нарушится, если это тело станет абсолютно твердым. Из принципа отвердевания следует, что условия, необходимые и достаточные для равновесия данного абсолютно твердого тела, необходимы, но недостаточны для равновесия деформируемого тела, по форме и размерам тождественного с данным телом. Следует помнить, что если абсолютное твердое тело после приложения к нему сил приходит в состояние равновесия, не деформируясь, то такое же деформируемое тело под действием тех же сил обязательно деформируется. Принцип отвердевания широко используют в инженерных расчетах. Без
48
принципа отвердевания невозможно составлять уравнения равновесия и движения твердого деформируемого тела.
Аксиома седьмая (принцип освобождения от связей) Связями для рассматриваемого тела называют тела, огра-
ничивающие перемещение данного тела под действием приложенных к телу сил. Наличие связей делает тело несвободным. В статике рассматриваются стационарные связи, т. е. не зависящие от времени. Связи действуют на тело силами, которые называют реакциями связей. В теоретической механике последствия воздействия на связь не учитывается. Связь считается неразрушимой ни при каких условиях, поскольку разрушение связи приводит к изменению взаимодействий в системе тело – связь.
Тела, не взаимодействующие со связями, называют свободными.
Принцип освобождения от связей заключается в том, что всякое несвободное тело можно, мысленно отбросив связи, рассматривать как свободное, если действия связей заменить силами - реакциями связей. Реакции связей вторичны, они возникают как противодействие силам, приложенным к телу.
Все силы, кроме реакций связей, называют заданными силами, хотя при решении задач заданные силы необязательно могут быть заданы (известны). Происхождение термина «заданные силы» может быть объяснено только в разделе динамика. Заданные силы чаще всего являются активными, т. е. силами, которые могут вызвать движения свободного тел. Но понятие заданная сила шире понятия активные силы. Некоторые заданные силы не являются активными и сами не могут вызвать движение тела. С учетом изложенного выше, силы будем подразделять на реакции связей и на активные силы.
7.3. Момент силы относительно точки
Плечом силы P относительно точки О называют перпендикуляр OK, опущенный из точки О на линию действия силы
(рис. 7.1).
49