

1.4. Формализация технико-эксплуатационных требований, предъявляемых к объекту проектирования
При
автоматизированном проектировании
выполнение проектных процедур
основано на оперировании математическими
описаниями объекта проектирования.
В том случае, когда математическое
описание является детерминированным,
при заданных значениях внешних
параметров
выходные
параметры
однозначно определяются вектором
внутренних параметров
![]() :
:
![]()
…………….. (1.5)
![]()
В
процессе проектирования все или
некоторая часть внутренних параметров
элементов объекта проектирования могут
варьироваться в некоторых пределах,
что позволяет в дальнейшем называть
их управляемыми
переменными.
Те внутренние параметры, которые,
как и внешние параметры, остаются
неизменными в процессе проектирования,
образуют совокупность неуправляемых
переменных.
Для определенности будем считать, что
могут принимать различные значения
все ![]() внутренних параметров, в связи с
чем, будем обозначать управляемые
переменные вектором
внутренних параметров, в связи с
чем, будем обозначать управляемые
переменные вектором ![]() ,
на компоненты которого наложены прямые
ограничения,
отражающие существующие требования
физической и технологической
реализуемости, конструктивные
соображения и условия эксплуатации:
,
на компоненты которого наложены прямые
ограничения,
отражающие существующие требования
физической и технологической
реализуемости, конструктивные
соображения и условия эксплуатации:
![]() (1.6)
(1.6)
где
![]() — нижнее
и верхнее предельно допустимые значения
для i-й
управляемой переменной.
— нижнее
и верхнее предельно допустимые значения
для i-й
управляемой переменной.
Область пространства управляемых переменных, в которой выполняется система прямых ограничений (1.6), будем называть областью поиска:
![]() (1.7)
(1.7)
В
процессе проектирования стремятся
выбирать значения вектора управляемых
переменных, принадлежащего области
поиска ![]() ,
таким образом, чтобы удовлетворить
техническим требованиям, которые
предъявляются к выходным параметрам
объекта проектирования. Эти требования
весьма разнообразны и определяются
многими условиями, среди которых можно
отметить следующие:
,
таким образом, чтобы удовлетворить
техническим требованиям, которые
предъявляются к выходным параметрам
объекта проектирования. Эти требования
весьма разнообразны и определяются
многими условиями, среди которых можно
отметить следующие:
- условия физической и схемной реализуемости;
- требования к предельно допустимым значениям выходных параметров, определяющие норму, устанавливаемую на выходные параметры в техническом задании;
- условия функционирования, гарантирующие надежную и экономичную работу реального объекта;
- предельные значения режимных параметров и т.д.
При
формализации задачи автоматизированного
проектирования удовлетворение этих
требований сводится к выполнению
системы соотношений между выходными
параметрами ![]() и их предельно допустимыми по техническому
заданию значениями
и их предельно допустимыми по техническому
заданию значениями ![]() ,
которые
называют условиями
работоспособности.
Несмотря на разный физический смысл
требований, предъявляемых к объекту
проектирования, ограничения на
выходные параметры можно записать в
виде системы неравенств:
,
которые
называют условиями
работоспособности.
Несмотря на разный физический смысл
требований, предъявляемых к объекту
проектирования, ограничения на
выходные параметры можно записать в
виде системы неравенств:
![]() (1.8)
(1.8)
где — нормы, предъявляемые к j-му выходному параметру.
Ограничения (1.8) эквивалентны следующей системе неравенств, записанной в векторной форме:
![]() (1.9)
(1.9)
где
![]()
![]()
К системе неравенства (1.9) может быть сведено любое k-ое ограничение типа равенства:
![]() (1.10)
(1.10)
путем замены его парой неравенств:
![]()
Физический
смысл ограничения типа равенства (1.10)
заключается в том, что какие-то из
выходных параметров ![]() объекта проектирования должны принимать
строго определенные значения
объекта проектирования должны принимать
строго определенные значения ![]()
В
свою очередь, любое ограничение типа
неравенства ![]() с помощью введения дополнительной
переменной
с помощью введения дополнительной
переменной ![]() сводится к эквивалентному ограничению
типа равенства:
сводится к эквивалентному ограничению
типа равенства:
![]() 0.
0.
Одной
из особенностей задач автоматизированного
проектирования является то, что в
систему ограничений (1.8) могут входить
выходные параметры, которые непрерывно
зависят от независимой
переменной
v
(пространственной
координаты, времени, частоты и т.д.).
Такими выходными параметрами могут
быть амплитудно-частотная или
фазово-частотная характеристика,
коэффициент усиления по напряжению
или мощности, напряжение или линейное
перемещение для заданного материала
конструкции и т.д. В этом случае нормы,
накладываемые на выходной параметр
![]() ,
должны выполняться в некотором диапазоне
изменения независимой переменной
,
должны выполняться в некотором диапазоне
изменения независимой переменной
![]() :
:
![]() (1.11)
(1.11)
Переход
от непрерывного ограничения (1.11) к
ограничению типа (1.9), не зависящему
от значения независимой переменной v,
можно
осуществить, например, с помощью
дискретизации условия (1.11), заменяя
интервал ![]()
![]() -сетью
-сетью
![]() состоящей
из s
равномерно
расположенных точек:
состоящей
из s
равномерно
расположенных точек:
![]() (1.12)
(1.12)
Совокупность
точек (1.12) характеризуется точностью
,
равной расстоянию между двумя смежными
точками множества
.
Очевидно,
для любой непрерывной функции ![]() можно
выбрать такое число
можно
выбрать такое число![]() ,
что для любого
,
что для любого ![]() выполнение неравенства (1.11), зависящего
от непрерывно изменяющейся переменной
выполнение неравенства (1.11), зависящего
от непрерывно изменяющейся переменной
![]() ,
будет
эквивалентно выполнению неравенства:
,
будет
эквивалентно выполнению неравенства:
![]() (1.13)
(1.13)
В дальнейшем будем считать, что ограничения типа (111) сведены к системе неравенств (1.9) с помощью соотношения (1.13).
Область пространства управляемых переменных, в пределах которой выполняются все условия работоспособности (1.9), будем называть областью работоспособности:
![]() (1.14)
(1.14)
В процессе проектирования представляют интерес только те значения управляемых переменных х, которые принадлежат области D, образованной пересечением области поиска Dx и области работоспособности Dg:
![]() (1.15)
(1.15)
Множество
D
состоящее
из всех трех векторов управляемых
переменных х, для которых одновременно
выполняются системы неравенств
(1.6) и (1.9), называется областью
допустимых решений. Любому
вектору управляемых переменных х,
принадлежащему области допустимых
решений ![]() ,
соответствует работоспособный
вариант
объекта проектирования, для которого
выполняются все условия технического
задания.
,
соответствует работоспособный
вариант
объекта проектирования, для которого
выполняются все условия технического
задания.
По структуре область допустимых решений D может оказаться выпуклым или невыпуклым множеством, которое, в свою очередь, может быть односвязным или многосвязным.
Множество
точек, образующих область допустимых
решений D,называется
выпуклым
множеством,
если для любой пары точек ![]() отрезок прямой линии, соединяющей эти
точки
отрезок прямой линии, соединяющей эти
точки
![]()
также полностью принадлежит области D. На рис. 1.2 приведены примеры выпуклой и невыпуклой областей допустимых решений D.
Р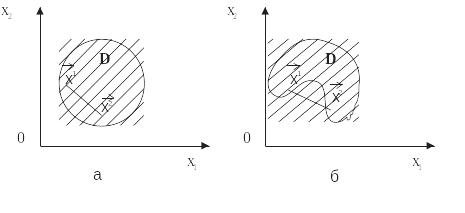 ис.
1.2. Выпуклая (а) и невыпуклая (б) области
допустимых решений D
ис.
1.2. Выпуклая (а) и невыпуклая (б) области
допустимых решений D
Множество точек, образующих область допустимых решений D, называется многосвязным множеством, если оно состоит из нескольких отдельных частей (выпуклых или невыпуклых), которые не связаны между собой. В противном случае, область допустимых решений образует односвязное множество. На рис. 1.3 приведены примеры односвязной области D:
![]()
![]()
![]()
и
многосвязной области D,
состоящей из двух частей ![]()
![]()
![]()
.
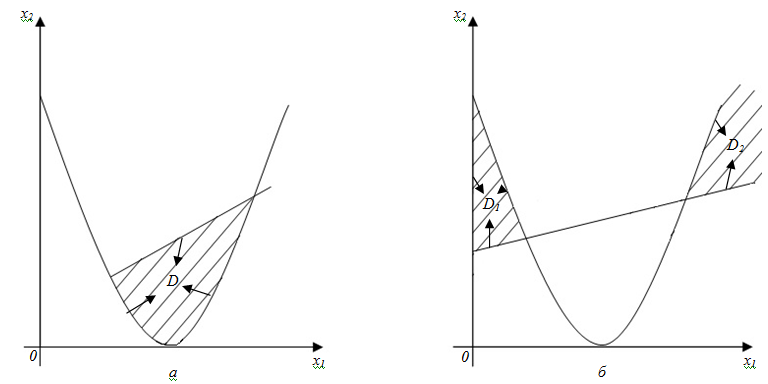
Рис. 1.3. Односвязная D(a)
и многосвязная ![]() (б)
области допустимых решений
(б)
области допустимых решений
В заключение отметим, что при использовании в задачах автоматизированного проектирования стохастического математического описания проектируемого объекта (1.3) введенное понятие области работоспособности (1.14) позволяет реализовать проектную процедуру оценки процента годных вариантов, связанную с определением вероятности выполнения условий работоспособности (1.8) проектируемого объекта при заданных законах распределения неконтролируемых параметров:
![]() (1.16)
(1.16)
Вычисление статистического показателя
(1.16), в котором отражается случайный
характер внутренних параметров, может
быть выполнено методом Монте-Карло,
требующим проведения N
одновариантных анализов объекта
проектирования при заданных случайных
значениях неконтролируемых параметров
![]()