

Учебное пособие 1828
.pdfВ результате формула (5.4) дает
|
e |
r |
. |
(5.7) |
a |
a |
a |
Следовательно, при поступательном переносном движении абсолютное ускорение точки равно векторной сумме относительного и переносного ускорений. Получен результат, аналогичен тому, который дает теорема о сложении скоростей.
5.3.2 Сложение ускорений при непоступательном
переносном движении. Теорема Кориолиса
Допустим сначала, что переносное движение (т. е. движение подвижной системы отсчета
Oxyz ) является вращательным с угловой скоро-
стью (рис. 5.4). При этом ось OD может быть или неподвижной, или мгновенной осью вращения (когда неподвижна точка О, см. § 4.1). В обоих случаях орты i, j, k уже не яв-
ляются постоянными, так как, поворачиваясь вместе с осями Oxyz , они изменяют свои направле-
ния, что при опрделении r не учитывалось. w
Поэтому из равенств (5.5), применимых к любому переносному движению, получим
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dv r |
|
di |
|
dj |
|
dk |
|
||||||
|
|
( xi |
yj |
zk ) |
( x |
|
y |
|
z |
|
) a r |
a |
, |
|
|
|
|
|
|
||||||||||
|
dt |
|
|
|
|
dt |
|
dt |
|
dt |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где через |
a1 |
обозначена вторая скобка в пра- |
||||||||||||
вой части последнего равенства.
168

Из формул Пуассона (§4.3) следует
|
x( |
|
|
y( |
|
|
|
z( |
|
|
|
|
|
|
|
|
|
a |
|
i ) |
|
|
j ) |
|
k ) |
|
( xi |
yj |
zk ) |
|
v r |
||||
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Тогда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
r |
|
|
|
|
|
r |
|
|
|
|
|
|
|
|
dv r |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
a |
a |
, где |
a |
|
v |
. |
(5.8) |
||
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
dt |
|
|
1 |
|
1 |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Здесь величина |
r |
учитывает изменение |
|
|||||||||||||
|
a |
|
|
||||||||||||||
вектора |
r |
только при относительном движении |
|||||||||||||||
v |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
точки М, а слагаемое a1 учитывает то измене- |
|||||||||||||||||
|
|
|
|
|
r |
, которое происходит при его |
|
||||||||||
ние вектора v |
|
||||||||||||||||
повороте вместе с системой |
K |
вокруг оси ОD |
|
||||||||||||||
т. е. в переносном движении. |
|
|
|
|
|
||||||||||||
Далее, при вращательном движении скорость и ускорение любой жестко связанной с системой K точки m определяются по формулам (4.3) и (4.5), как и для точек твердого тела. Соглас-
|
|
|
|
e |
|
|
e |
|
|
|
|
но равенствам (5.1) |
v |
|
vm , |
a |
|
am ; следова- |
|||||
тельно, формулы (4.3) и (4.5) дают |
|
||||||||||
e |
|
|
e |
( |
|
|
( |
|
r |
) , |
|
v |
|
r , |
a |
|
r ) |
|
v |
(5.9) |
|||
где r - вектор -радиус- точки m, совпадающий в данный момент времени с вектором - радиусом движущейся точки M относительно системы K .
Тогда
|
|
d |
|
|
|
|
|
dv e |
|
|
dr |
||||
|
|
|
r |
|
|
. |
|
dt |
|
dt |
dt |
||||
Поскольку стоящая слева производная входит в правую часть равенства (5.4), определяющую абсолютное ускорение точки M, т. е. ее
169

ускорение относительно системы K1 , то и входящая в правую часть производная от вектора - радиуса r даст скорость точки М в той же системе, т. е. ее абсолютную скорость.
dr
Следовательно, здесь v dt
ме того, |
d |
|
|
. Поэтому |
|
|
|
|
|||||
dt |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
e |
|
|
|
|
|
|
dv e |
|
|
|
|
|
||||||
|
|
|
|
|
( |
|
r ) |
( |
|
v |
) |
( |
|
|
|
dt |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
||
Отсюда, учитывая второе из (5.9), получим
e |
r |
и, кро- |
v |
v |
v r ) .
равенств
|
|
e |
|
|
|
|
r |
|
|
dv e |
|
|
|||||
|
|
a |
a2 |
, где a2 |
|
v |
. |
|
|
dt |
|
||||||
|
|
|
|
|
|
|
|
|
(5.10) |
|
|
|
|
|
|
||
Здесь величина |
e |
учитывает изменение |
||||||
a |
||||||||
|
e |
только в переносном движении, по- |
||||||
скорости v |
||||||||
скольку она вычисляется как ускорение точки
m, связанной с системой |
K1 . Второе же слагае- |
||
|
|
e |
|
мое a2 |
учитывает то изменение вектора v |
, ко- |
|
торое происходит при относительном движении точки М, поскольку в результате этого движения точка М приходит из положения m в новое
положение , где скорость e будет уже дру- m1 v
гой.
Формулы (5.8) и (5.10) получены для вращательного переносного движения. Однако и в общем случае, когда переносное движение, как и движение свободного твердого тела (см. § 4.4), слагается из поступательного и вращательного, формулы (5.8) и (5.10) сохраняют
170

свой вид, с той лишь разницей, что в (5.10)
величина e будет определяться не по формуле a
(5.9), а по формуле (4.10).
Подставляя теперь величины (5.8) и (5.10) в (5.4), получим
|
|
e |
r |
|
|
|
|
|
a |
a |
a |
|
a |
a . |
|
|
|
|
|
|
1 |
|
2 |
|
(5.11) |
|
|
|
|
|
|
Пусть |
|
|
|
|
|
|
|
k |
|
|
|
2( |
|
r |
). |
a |
a |
a |
|
|
v |
||
|
1 |
2 |
|
|
|
|
|
(5.12)
Величина k , характеризующая изменение a
вектора относительной скорости r в перенос- v
ном движении и вектора переносной скорости e v
в относительном движении, называется поворотным или кориолисовым ускорением точки. Тогда (5.11) примет вид
|
e |
r |
k |
. |
a |
a |
a |
a |
(5.13)
Эта формула выражает следующую теорему Кориолиса: абсолютное ускорение точки равно векторной сумме трех ускорений: относительного, характеризующего изменение относительной скорости точки в относительном движении, переносного, характеризующего изменение переносной скорости точки в переносном движении, и кориолисова ускорения, характеризующего изменение относительной скорости точки в переносном движении и переносной скорости точки в относительном движении.
Если переносное движение является посту-
171

пательным, то = 0 и k = 0, и (5.13) пе- a
реходит в (5.7).
5.3.3. Определение относительного, переносного
и кориолисова ускорений Методы определения относительного и пере-
носного ускорений точки были, рассмотрены при доказательстве теоремы. Эти ускорения определяются по известным формулам кинематики.
r |
движение под- |
|
Так как при определении a |
||
вижных осей не учитывается, то |
r |
определяет- |
a |
||
ся обычными методами кинематики точки (§§1.4,
1.5).
При определении же e не надо учитывать a
относительное движение точки. Следовательно,
e нужно определять методами кинематики твер- a
дого тела (§§ 4.2, 4.4), как ускорение точки некоторого твердого тела, неизменно связанного с системой K и движущегося вместе с этой системой.
Кориолисово ускорение определяется по формуле (5.12):
ak 2( v r ), (5.14)
где - угловая скорость переносного движения.
Таким образом, кориолисово ускорение точки равно удвоенному векторному произведению угловой скорости переносного движения на относительную скорость точки.
172

|
|
Если угол между векторами |
r |
и |
|
обо- |
|
||||||||||
|
|
v |
k |
|
|||||||||||||
значить через |
|
, то модуль вектора |
|
|
|
||||||||||||
|
a |
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
ak 2 |
vr |
sin . |
|
|
|
|
|
|
|
||
|
|
|
|
|
(5.15) |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
k |
так же, как вектор |
||||||||
|
|
Направлен вектор a |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
r |
, то есть |
||||||
|
|
|
|
|
|
|
|
|
|
v |
|
||||||
|
|
|
|
|
|
|
|
|
перпендикулярно |
||||||||
|
|
|
|
|
|
|
|
|
плоскости, про- |
||||||||
|
|
|
|
|
|
|
|
|
ходящей через |
||||||||
|
|
|
|
|
|
|
|
|
векторы |
|
и |
r |
|||||
|
|
|
|
|
|
|
|
|
|
v |
|||||||
|
|
|
|
|
|
|
|
|
в ту сторону, |
||||||||
|
|
r |
|
Рис. 5.5. |
откуда поворот |
||||||||||||
к |
на минимальный угол виден происходя- |
||||||||||||||||
|
v |
||||||||||||||||
щим против хода часовой стрелки (рис. 5.5, |
|||||||||||||||||
а). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
Из рис. 5.5, а видно также, что направле- |
|||||||||||||||
|
|
|
|
k |
можно получить, спроецировав |
||||||||||||
ние вектора a |
|
||||||||||||||||
вектор |
r |
на плоскость |
Q , перпендикулярную |
||||||||||||||
v |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
r |
на 90° в сто- |
|||||||
|
, и повернув эту проекцию v |
||||||||||||||||
|
|
|
|
|
|
|
|
|
Q |
|
|
|
|
|
|
|
|
рону переносного вращения. Если относительная траектория – плоская кривая и перемещается все время в своей плоскости, то угол  = 90° (рис. 5.5, б), и в этом случае
= 90° (рис. 5.5, б), и в этом случае
a |
k |
2 |
|
|
r |
|
. |
|
|
||||||
|
|
|
v |
|
(5.16)
Как видно из рис. 5.5, б, направление k a
можно найти, повернув вектор относительной
скорости r на 90° в сторону переносного вра- v
щения (т. е. по ходу или против хода часовой
173
стрелки, в зависимости от ния вращения). В
этом заключается правило Н.Е. Жуковского.
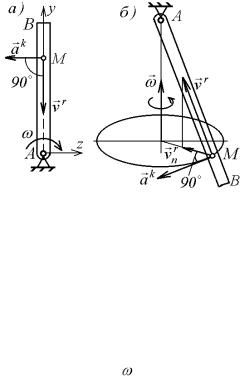
На рис. 5.6 для иллюстрации приведенных правил показано направление вектора корио-
лисова ускорения шарика М, движущегося вдоль трубки АВ в случаях, когда трубка вращается в плоскости чертежа (рис. 5.6, а) и когда она при вращении описывает конус (рис. 5.6, б).
Из формулы (5.15) видно, что кориолисово Рис. 5.6. ускорение может обращаться в нуль в следующих случа-
ях:
1)Когда = 0, т. е. когда переносное движение является поступательным (формула 5.7), или если угловая скорость переносного вращения в данный момент времени обращается в нуль.
r
2)Когда v = 0, т. е. когда относительная скорость в данный момент времени обращается в нуль.
3)Когда  = 0, или
= 0, или  =180°, т.е. когда относительное движение происходит по направлению, параллельному оси переносного вращения
=180°, т.е. когда относительное движение происходит по направлению, параллельному оси переносного вращения
или если в данный момент времени вектор r v
параллелен этой оси.
174
§ 5.4. Примеры решения задач
А. Переносное движение поступательное
В случае, когда переносное движение является поступательным, характер задач и методы их решения аналогичны задачам на сложение скоростей (§ 5.2).
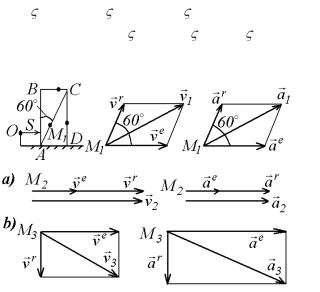
Пример 5.1. Прямоугольная пластина ABCD (рис. 5.7) движется поступательно, причем ее расстояние от неподвижной точки О изменяется согласно закону  = 3t + 3t3 (t - в с,
= 3t + 3t3 (t - в с, 
- в м).
По диагонали AC, составляющей угол 60° со стороной AD и по сторонам пластины движутся три точки так, что расстоя-
ния 1 = AM1, 2 = BM2 , |
3 = CM3 |
изменяются согласно сле- |
дующим законам: 1 = 4t3, |
2 = t2, |
3 = 5t + 2t2. |
Определить в момент времени t1= 1 с абсолютные скорости и ускорения точек M1,
M2, M3.
Решение. Подвижную систему координат мысленно скрепляем с пластиной. Оси координат перемещаются параллельно, т. е. движутся
Рис. 5.7. поступательно. Непод-
вижная система отсчета скреплена с плоскостью, по которой скользит пластина. Применим формулы (3.1) и (3.2). Так как при поступательном движении твердого тела скорости и уско-
175
рения всех его точек соответственно равны между собой в каждый момент времени, то, скрепив мысленно точки M1, M2 и M3 с подвижной системой координат, т.е. с пластиной, получаем, согласно определению переносного движения, что переносные скорость и ускорение точек M1, M2 и M3 равны соответственно скорости и ускорению какой-нибудь точки пластины, например точки А. Все точки пластины движутся прямолинейно, и поэтому скорости и ускорения этих точек направлены вдоль их прямолинейных траекторий
ve |
d |
3 9t |
2 |
м / с; ae |
d 2 |
18t м / с2 . |
dt |
|
dt2 |
||||
|
|
|
|
|
При t1 = 1c ve 1 = 12 м/с; ae 1 = 18 м/с.
Относительным движением точек M1, M2, M3 являются их прямолинейные движения по пластине, и поэтому относительные скорости и ускорения этих точек направлены вдоль их прямолинейных относительных траекторий, т. е. по отрезкам
AC, ВС и CD
|
ve |
d 1 |
|
|
12t |
2 ; |
ae |
|
d 2 |
1 |
|
|
24t , |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
1 |
|
dt |
|
|
1 |
|
dt |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
||||||
|
ve |
|
|
d 2 |
2t; |
ae |
d 2 |
2 |
|
|
2 , |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
2 |
|
|
dt |
|
|
2 |
|
dt |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
ve |
|
d 3 |
5 |
4t; |
ae |
|
|
d 2 |
3 |
4 . |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
3 |
|
dt |
|
|
3 |
|
|
dt |
|
||||||
|
|
|
|
|
|
|
|
|
||||||||
При t1 = 1 с |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ve |
12 м / c, ae |
24 м / c2 , |
ve |
2 м / c |
||||||||||||
1 |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
2 |
|
ae |
2 м / c2 , |
ve |
9 м / c, ae |
|
4 м / c2 . |
|||||||||||
2 |
|
|
|
|
|
|
3 |
|
|
3 |
|
|
|
|||
Согласно (3.1) и (3.2) строим параллелограммы скоростей и ускорений (см. рис. 5.7). Модули полученных векторов находим по теореме косинусов
v |
122 |
122 |
2 12 12 cos60 |
2 |
105 |
20,5 м / с , |
||
1 |
|
|
|
|
|
|
|
|
|
182 |
242 |
|
|
|
|
|
36,5 м / с2 , |
a |
2 18 24 cos60 |
6 |
37 |
|
||||
1 |
|
|
|
|
|
|
|
|
176
|
|
v2 |
12 2 14м / c, a2 |
18 2 20 м / c2 , |
||||||
|
|
|
|
|
|
|
|
|
|
|
v |
3 |
122 |
9 |
2 15м / c, a |
3 |
182 42 5 14 18,7 м / c2 . |
||||
|
|
|
|
|
|
|
|
|
||
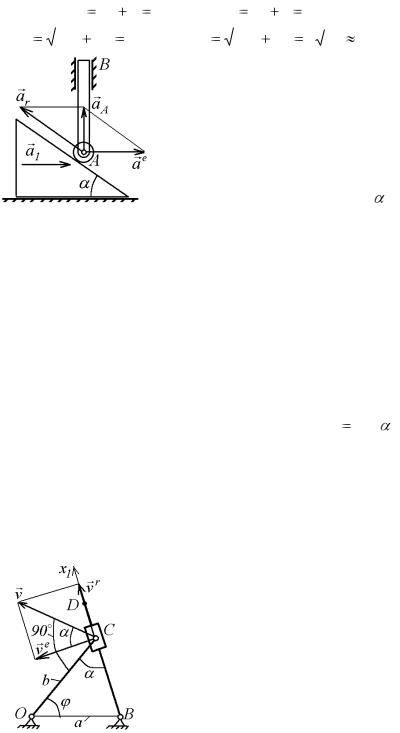
Пример 5.2. Клин, движущийся горизонтально с ускоре-
нием a1 перемещает вдоль вер-
тикальных направляющих стержень АВ (рис. 5.8). Опреде-
лить ускорение стержня aA , если угол клина равен .
Решение. Абсолютное ускорение aA , точки А стержня направлено вертикально вверх. Его можно рассматривать как состоящее из относи-
тельного ускорения r , направленного вдоль a
наклонной плоскости клина, и переносного ус-
корения e , равного ускорению клина, посколь- a
ку переносное движение, т.е. движение клина, является при этом поступательным. Строя в соответствии с равенством (5.7) параллелограмм
ускорений и учитывая, что
Рис. 5.8. |
e |
= |
|
, получим |
aA |
a1tg . |
|
a |
a1 |
Вектор aA и определяет ускорение стержня.
Б. Переносное движение вращательное
Рассмотрим определение a в общем случае, когда переносное движение является вращением вокруг некоторой неподвижной
оси.
Пример 5.3. Кулисный механизм с качающейся кулисой приводится в движение кривошипом ОС (рис. 5.9). Определить скорость движения точки С пол-
177