

Учебное пособие 1828
.pdf§ 3.4. Примеры решения задач
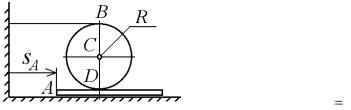
Пример 3.1. Колесо радиуса R = 1 м катится без скольжения по прямолинейному горизонтальному рельсу. Скорость и ускорение центра колеса в данный момент v0 = 1 м/с; a0 = 3 м/с2. Определить для данного момента времени скорости и ускорения
точек P, M1 и M2 колеса
(рис. 3.10).
Решение. Колесо движется плоскопараллельно. Берем за полюс центр О
колеса и применяем формулы (3.2) и 3.3). В соответствии с рис. 3.9 строим на рис. 3.10 для каждой из точек P, M1 и M2 составляющие векторов ускорений этих точек, а векторы скоростей тех же точек проводим перпендикулярно прямым, соеди-
Рис. 3.10. няющим эти точки с мгновенным центром скоростей
- точкой P. Скорость точки P равна нулю, так как по условию
колесо катится без |
скольжения |
vP = 0. Согласно (3.5), |
||||||||||||||||
|
v1 |
|
M 1P |
. Поскольку |
|
|
|
|
|
|
|
|
|
, получаем |
||||
|
|
M1P |
|
R 2 |
||||||||||||||
|
v0 |
|
R |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
v1 |
v0 |
|
2 |
|
|
2м / c |
14,1 м/с. |
|||||||
|
|
|
|
|
v2 |
|
2R |
|
|
2 , v2 |
2v0 |
2 м/с. |
||||||
|
|
|
|
|
v0 |
|
R |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
Согласно (3.4), v0 |
|
|
R |
. Тогда |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
v0 / R . |
|
(3.7) |
||||
Равенство (3.7) верно для каждого момента времени, а поэтому его можно продифференцировать по времени, учитывая
138

(2.5): |
d |
|
1 dv0 |
. Поскольку центр колеса движется |
||
|
|
|
|
|
||
dt |
|
R dt |
||||
|
|
|
||||
прямолинейно, его нормальное ускорение равно нулю (см. гл.
1), и тогда a0 aO |
|
dv0 |
|
|
R . Следовательно |
|
|
|||||||
|
dt |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a0 / R . |
|
|
|
|
|
(3.8) |
|
||
Формулы (3.7) и (3.8) часто встречаются при решении за- |
||||||||||||||
дач. В этом примере: |
|
= 1 с-1, |
= 3 с-2. Для точек P, M1 и M2 |
|||||||||||
получаем |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
aPO |
|
aM 1O |
aM 2O |
R |
3 м/с2, |
|
|
|||||||
aPOn |
aMn 1O |
aMn 2O |
|
R |
2 |
|
1 м/с2. |
|
|
|||||
|
|
|
|
|
|
|
n |
; aP |
|
2 |
|
|
||
Из рис. 3.10 следует, что aP |
|
aP0 |
= 1 м/с ; |
|
|
|||||||||
|
|
|
|
|
|
|
5 м/с2, |
|
|
|||||
a1 |
( a0 |
aMn 1P )2 |
( aM 1O )2 |
|
|
|
||||||||
|
a2 |
|
a0 |
aM 1O |
6 м/с2. |
|
|
|
||||||
|
|
|
|
|
|
|
Пример 3.2. Отрезок AB= |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
3 |
м |
|
движется в |
плоскости |
||||
|
|
|
|
|
чертежа, а скорости концов А и |
|||||||||
|
|
|
|
|
В образуют в данный момент с |
|||||||||
|
|
|
|
|
отрезком углы 30° и 60° (рис. |
|||||||||
|
|
|
|
|
3.11) |
и |
скорость |
конца |
A |
|||||
|
|
|
|
|
|
|
|
|
|
м/c. Определить для |
||||
|
|
|
|
|
vA |
2 |
3 |
|
||||||
|
|
|
|
|
данного момента времени ско- |
|||||||||
|
|
|
|
|
рости конца В и середины от- |
|||||||||
Рис. 3. 11. |
|
|
резка |
D, |
а |
также величину |
и |
|||||||
|
|
|
|
|
направление |
угловой |
скорости |
|||||||
отрезка. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
139

Решение. Из формулы (3.4) vA cos 30° = vB cos 60°; vB = 6
м/с. Мгновенный центр скоростей P находится на пересечении перпендикуляров AP и BP, идущих из точек А и В к векторам скоростей этих точек. Получаем равнобедренный треугольник
|
|
|
|
|
|
|
|
|
|
|
|
|
|
BAP: AB = AP = 3 |
|
м. Из |
DAP, по теореме косинусов, нахо- |
||||||||||
дим |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
||
PD AD2 |
AP2 |
|
|
|
|
|
|||||||
2 AD AP cos 120 0,5 |
21 м. |
||||||||||||
Согласно (3.5), |
|
vD |
|
|
DP |
. Отсюда поучается |
|
|
|
|
|||
|
vD 21 |
||||||||||||
|
vA |
AP |
|||||||||||
|
|
|
|
|
|
|
|
|
|
||||
4,583 м/с. |
|
|
|
|
|
|
|
|
|
|
|
||
Из (3.5) следует, что скорость любой точки плоской фигуры равна ее расстоянию до мгновенного центра скоростей, умноженному на угловую скорость фигуры: vA = AP . Отсюда
vA / AP  2 с-1. По направлениям скоростей точек А и В
2 с-1. По направлениям скоростей точек А и В
видно, что фигура (отрезок AB) вращается вокруг мгновенного центра скоростей против хода часовой стрелки.
Решим задачу другим способом. Проецируем (3.2) на направление AB и на перпендикуляр к AB. Из первого равенства
снова имеем vB = 6 м/с. |
Из второго |
равенство |
vB cos 30 |
||||||
vA cos 60 |
AB находим |
= 2 с-1. |
|
|
|
|
|||
|
Применим формулу (3.2) для точек А и В, взяв за полюс |
||||||||
|
|
|
|
|
|
|
|
|
|
точку D (середину отрезка): vA |
vD |
vAD , |
vB |
vD |
vBD . Сло- |
||||
|
|
|
|
|
|
|
|
|
|
жим эти равенства: vA |
vB |
2vD |
vBD |
vAD |
. Модули векторов |
||||
|
|
|
|
|
|
|
|
|
|
vAD |
и vBD |
равны произведению AD . |
Скорости vAD и vBD на- |
||||||
правлены противоположно, как скорости вращения относи-
|
|
|
|
|
|
тельно центра D. Поэтому vBD |
vAD |
0 |
и vD |
0,5( vA |
vB ) . |
Приняв направления по AB и по перпендикуляру к AB за оси х и у, спроецируем это равенство на эти оси
vDx 0,5( vA cos 30 vB cos 60 )
vB cos 60 )  3 м/с,
3 м/с,
140

|
|
|
|
|
|
|
vDy 0,5( vA cos 60 |
vB cos 30 ) 2 3 м/с, |
|||||
|
|
|
|
|
||
|
vDx2 vDy2 |
|
|
|
||
vD |
|
21 4,583 м/с. |
||||
Пример 3.3. Отрезок AB = 1 м движется в плоскости чертежа. Ускорения концов A и В
даны: aA = 2 м/с2, aB = 
 2 м/с2 и образуют в данный момент с отрезком углы 90° и 45° (рис. 3.12). Определить для данного
2 м/с2 и образуют в данный момент с отрезком углы 90° и 45° (рис. 3.12). Определить для данного
Рис. 3.12. момента времени величины угловых скорости и ускорения отрезка.
Решение. Выбрав оси координат, и спроецировав равенство (3.3) на эти оси, получаем
|
aB cos 45 |
AB 2 , |
aB cos 45 aA AB . |
||
|
Отсюда находим |
= 1 с-1, |
= 1 с-2. |
|
|
|
Направление относительного |
касательного |
ускорения |
||
|
|
|
|
|
|
aBA |
BA было неизвестно и поэтому оно было выбрано произ- |
||||
|
|
|
|
|
|
вольно. Если бы aBA |
было направлено вверх, то получили бы |
||||
|
|
|
|
|
|
= - 1 с-2. Знак минус означал бы, что истинное направление aBA |
|||||
|
противоположно |
принятому |
направле- |
||
|
нию. |
|
|
|
|
|
|
§ 3.5. Задачи для самостоятельного |
|||
|
|
|
решения |
|
|
|
|
3.1. Линейка АВ эллипсографа (рис. |
|||
|
3.13) приводится в движение кривошипом |
||||
Рис. 3.13. 141

ОС, вращающимся равномерно вокруг оси О, с угловой скоростью  const . Принимая точку А за полюс, составить уравнения движения линейки эллипсографа. Если ОС= ВС= АС= r .
const . Принимая точку А за полюс, составить уравнения движения линейки эллипсографа. Если ОС= ВС= АС= r .
3.2. Зубчатая шестерня радиуса r , катящаяся внутри неподвижного колеса
радиуса R (рис. 3.14), приводится в движение кривошипом ОА, вращающимся равномерно вокруг оси О этого колеса, с
Рис. 3.14. |
угловой скоростью |
const . Составить |
|
параметрические уравнения движения |
|||
|
|||
подвижной шестерни, принимая ее центр А за полюс. Параметром считать время t . Считать, что правому горизонтально-
му положению кривошипа ОА соответствует t |
0 . Угол пово- |
рота малого колеса |
отсчитывать |
так, как указано на рисунке.
3.3. Стержень АВ длиной 5 м опирается на неподвижное ребро С двугранного угла (рис. 3.15) и дви-
жется в плоскости чертежа так, что его нижний конец А скользит по горизонтальной оси х со скоростью vA  4 м/с. Опреде-
4 м/с. Опреде-
лить угловую скорость  и скорость Рис. 3.15. точек В и С стержня в момент, когда
и скорость Рис. 3.15. точек В и С стержня в момент, когда
угол  30 , если ОС= 2 м.
30 , если ОС= 2 м.
3.4. Кривошип АВ= 20 см совершает 120 оборотов в минуту и при помощи звена ВС= 100 см вращает стержень DC= 60 см, закрепленный шарнирно в точке D. Определить угловую скорость
стержня BC и угловую скорость стержня DC в момент, когда кривошип AB займет вертикальное положение. Известно, что в
Рис. 3.16. |
этот момент времени звено BC образует |
|
|
с вертикалью ABC 60 |
BCD 30 |
(рис. 3.16).
142

|
3.5. Кривошип AD вращает- |
||||
|
ся вокруг неподвижной оси A с |
||||
|
угловой скоростью |
0 |
4 |
с-1 |
|
|
|
|
|
||
|
приводит в движение зубчатое |
||||
|
колесо 2 радиуса r2 = 10 см, ка- |
||||
|
тящееся по неподвижному зуб- |
||||
Рис. 3.17. |
чатому колесу 1 радиуса r1 |
= 50 |
|||
см. С колесом 2 в точке E соеди- |
|||||
|
|||||
нен шарниром стержень EВ= 80 см, который приводит в движение ползун В, перемещающийся по горизонтальной направ-
|
|
ляющей, проходящей через точ- |
|||
|
|
ку A. Построить мгновенный |
|
||
|
|
центр скоростей звена EВ и най- |
|||
|
|
ти его угловую скорость, а также |
|||
|
|
скорость точки В в момент вре- |
|||
|
|
мени, соответствующий верти- |
|||
Рис. 3.18. |
|
кальному положению кривошипа |
|||
|
|
|
|
||
|
AD и DE || AВ (рис. 3.17). |
|
|
||
|
|
3.6. Кривошип ОА= 10 см нецен- |
|||
|
трального кривошипно– |
ползунного |
|||
|
механизма вращается вокруг непод- |
||||
|
вижной оси с угловой скоростью |
0 =1 |
|||
|
с-1 |
и угловым ускорением |
0 = 4 с-2 и |
||
|
приводит в движение шатун АВ= 550 |
||||
|
см, соединенный с ним шарнирно в |
||||
Рис. 3.19. |
точке А. Ползун В перемещается в наклон- |
||||
ных |
неподвижных направляющих |
mn . |
|||
|
|||||
Определить ускорение ползуна В и угловое ускорение шатуна АВ в момент времени. Когда ABn 60 и АВ|| ОА (рис. 3.18).
3.7. В механизме, изображенном на рис 3.19, кривошип ОА = 25 см врашается с постоянной угловой скоростью = 2 с-1 в плоскости рисунка вокруг неподвижной точки О и при помощи стержня АВ приводит в движение кривошип ВС, вра-
143

щающийся в той же плоскости вокруг неподвижной точки С. Определить скорость и ускорение точки В в тот момент, когда
кривошип ОА горизонтален, 
 ABC 30
ABC 30
АВ=ВС= 50 см.
3.8. В механизме, изображенном на рис. 3.20, кривошип ОА врашается в плоскости рисунка вокруг неподвижной точки О с угловой скоростью = 2 с-1 и угловым ускорением = 4 с-2 и приводит в движение свободно насаженную на него в точке А зубчатую шестерню 1 радиуса r1 = 5 см, катящуюся внутри неподвижного зубчато-
Рис. 3.20. го колеса 2 радиуса r2 = 15 см. Определить скорость и ускорение точки В подвижной шестерни, если
OAB 60 .
3.9. Равносторонний треугольник АВС движется в плоскости хОу так, что его вершины А и В перемещаются по
осям Ох и Оу, причем a A = 20 
 3 см/ с2, а aB = 20 см/ с2. Найти ускорение aC вершины С в момент времени, в кото-
3 см/ с2, а aB = 20 см/ с2. Найти ускорение aC вершины С в момент времени, в кото-
Рис. 3.21. |
рый сторона АС параллельна оси Ох, |
||
|
|
|
|
|
если АС= 20 см (рис. 3.21). |
||
|
3.10. Кривошип ОА длиной |
||
|
0,2 м , вращаясь равномерно с уг- |
||
|
ловой скоростью |
0 |
2 с-1, при- |
|
|
|
|
|
водит в движение с помощью ша- |
||
|
туна АВ длиной 0,4 м диск радиу- |
||
|
са r 0,1 м, вращающийся вокруг |
||
Рис. 3.22. |
оси, проходящей через точку С. В |
||
|
положении, указанном на рис. |
||
3.22. Определить скорость и ускорение точки В.
144
3.11. Цилиндрический каток радиуса r катится без скольжения по цилиндрической лунке радиуса R так, что его центр С имеет постоянную по модулю скорость v . Определить
ускорение точки контакта катка А и диаметрально противоположной ей точки В.
3.12. Пластина А перемещается по горизонтальной поверхности по закону sA( t ) 0,1( t4 
м. На пластине находится каток радиуса R = 0,2 м, обмотанный
нерастяжимой нитью, конец Е которой закреплен на стене. Считая, что скольжение пластины по катку отсутствует, определить в момент времени t  0,5 с ускорения точек В, С и D катка, указанных на рисунке 3.23.
0,5 с ускорения точек В, С и D катка, указанных на рисунке 3.23.
145

Глава 4. ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА ВОКРУГ НЕПОДВИЖНОЙ ТОЧКИ И ДВИЖЕНИЕ СВОБОДНОГО ТВЕРДОГО ТЕЛА
§ 4.1. Движение твердого тела, имеющего одну неподвижную точку
Рассмотрим движение твердого тела, закрепленного так, что одна его точка О остается во все время движения неподвижной относитель-
но неподвижной системы отсчета Ox1 y1 z1 . Такое
движение совершает, например, волчок, у которого неподвижна только его опорная точка о плоскость, или любое другое тело, закрепленное в точке О шаровым шарниром.
Для определения положения тела в пространстве свяжем жестко с телом систему координат Oxyz , по положению которой можно судить о положении тела (рис. 4.1). Линия ОК, вдоль которой пересекаются плоскости Oxy и называется линией узлов.
Положение осей системы Oxyz относительно осей Ox1 y1 z1 , как и положение тела,
можно определить углами:
KOx ,  x1OK ,
x1OK ,
z1Oz .
Эти углы называемые углами Эйлера, имеют следующие наименования, взятые из небесной механики: φ - угол собственного вращения, ψ - угол прецессии, θ - угол
нутации. Положительные направления отсчета
146
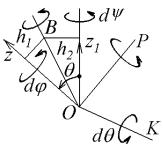
этих углов показаны на рис. 4.1 стрелками. При изменении угла φ тело совершает поворот вокруг оси Oz (собственное вращение), при изменении угла ψ – происходит поворот тела вокруг оси Oz1 (прецессия) и при изменении
угла θ – тело поворачивается вокруг линии узлов ОК (нутация).
Чтобы знать движение тела, надо знать его положение относительно осей в любой момент времени, т. е. знать зависимости:
 f1( t ) ,
f1( t ) ,  f2 ( t ),
f2 ( t ),  f3 ( t ) . (4.1)
f3 ( t ) . (4.1)
Уравнения (4.1), определяющие закон движения тела, называются уравнениями движения твердого тела относительно
неподвижной точки.
Для определения структуры рассматриваемого движения, докажем следующую теорему Эйлера - Даламбера: всякое элементарное перемещение тела, имеющего неподвижную точку, является эле-
ментарным, поворотом вокруг некоторой мгновенной оси вращении, прохо-
дящей через эту точку.
Пусть положение тела определяется углами φ, ψ, θ. Тогда его перемещение за элементарный промежуток времени dt представится как совокупность поворотов на углы dφ, dψ, dθ вокруг осей Oz , Oz1 и ОК соответственно. Суммируясь, эти три поворота дадут истинное элементарное перемещение тела. Рассмотрим сначала, каким будет результат сложения поворотов
147