

Учебное пособие 1828
.pdf1.5.3. Естественный способ
Формула (1.27) показывает, что ускорение точки характеризует изменение ее скорости. Величина и направление векто-
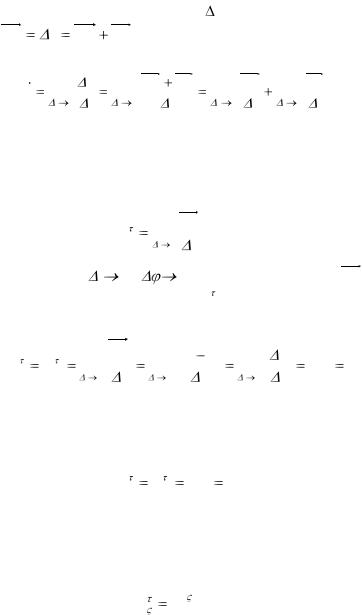
ра скорости v может меняться. Рассмотрим плоскую траекторию, имея в виду, что формулы, которые будут получены, верны и для пространственных траекторий.
Согласно (1.24) надо построить вектор |
|
|
|
||||
v приращения |
|||||||
|
|
вектора скорости. На |
|||||
|
|
рис. 1.11 изображены |
|||||
|
|
векторы скорости |
|||||
|
|
|
|
|
|
|
M1 A1 , |
|
|
v |
|
MA и v1 |
|||
|
|
соответственно для |
|||||
|
|
моментов времени t и |
|||||
|
|
t1. Для сравнения этих |
|||||
|
|
векторов построим |
|||||
Рис. 1.11. |
|
|
|
|
|
|
|
|
вектор v1 |
, отложив его |
|||||
|
M1 A1 |
|
|
|
|||
от точки M, т. е. перенесем вектор v1 |
параллельно в |
||||||
|
|
|
|
|
|
MB . Угол |
|
|
положение v |
||||||
|
|
|
|
|
|
|
|
|
|
между векторами v и |
|||||
|
|
|
|
|
|
|
|
|
v1 |
, называемый углом |
|||||
|
смежности, равен углу по- |
||||||
|
ворота касательной к тра- |
||||||
|
ектории при переходе по |
||||||
|
траектории от точки M к |
||||||
|
точке M1. По правилу век- |
||||||
|
торного сложения |
|
|||||
Рис. 1.12. |
MB |
MA |
AB , или |
||||
|
|
|
|
|
|
|
|
|
v1 |
= v |
+ |
v |
. Вектор прира- |
||
щения скорости v AB . |
|
|
|
|
|
|
|
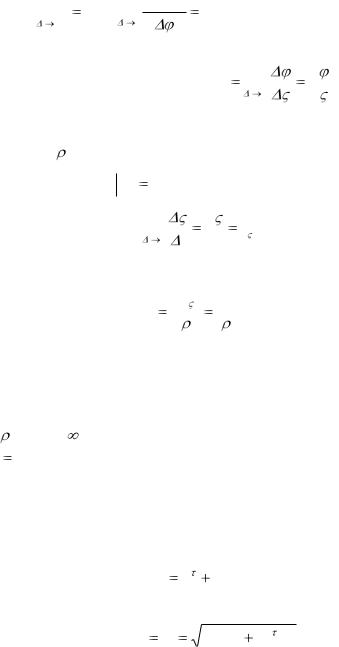
Пусть v1>v (для случая v1<v построение аналогичное). От- |
|||||||
|
|
|
|
|
|
|
|
ложим вдоль вектора v1 |
MB отрезок MC = MA = v и предста- |
||||||
108
вим вектор приращения скорости |
|
виде суммы двух векто- |
v |
ров AB v AC CB . Треугольник AMC - равнобедренный. Из (1.27) имеем
|
|
|
|
|
|
|
|
|
|
a lim |
v |
lim |
AC |
CB |
lim |
AC |
lim |
CB |
. (1.32) |
|
|
|
|
|
|||||
t 0 |
t |
t 0 |
t |
t 0 |
t |
t 0 |
t |
||
Вектор ускорения точки состоит из двух векторов: нормального и касательного (тангенциального).
Касательным (тангенциальным) ускорением называют век-
тор
|
|
|
|
|
|
CB |
. |
|
|
|
|
|
|
(1.33) |
||
|
|
|
a |
lim |
|
|
|
|
|
|
|
|||||
|
|
t |
|
|
|
|
|
|||||||||
|
|
|
|
t 0 |
|
|
|
|
|
|
|
|
|
|
||
Так как при t |
0 |
|
|
0, то в пределе вектор CB , опре- |
||||||||||||
деляющий направление вектора |
|
|
|
|
|
|
|
|
|
|||||||
a , направлен по касательной |
||||||||||||||||
к траектории в точке M. Модуль этого вектора |
|
|
|
|
||||||||||||
|
|
CB |
|
| v1 |
v | |
|
| v | |
|
dv |
|
dv |
|
||||
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
||||||||||
a | a | lim |
|
|
|
lim |
|
|
|
|
lim |
|
|
|
|
|
|
. |
|
|
t |
|
|
t |
t |
|
dt |
|
dt |
||||||
t 0 |
|
t 0 |
|
|
t 0 |
|
|
|
||||||||
Итак, вектор касательного ускорения точки направлен по касательной к траектории, а его модуль равен модулю производной от модуля скорости по времени
|
|
dv |
|
dv |
|
|
a | a |
| |
|
|
|
. |
(1.34) |
dt |
dt |
|||||
Проекцией касательного ускорения на направление роста координаты  называют производную от величины проекции скорости на то же направление по времени
называют производную от величины проекции скорости на то же направление по времени
a |
dv |
. |
(1.35) |
|
|||
|
dt |
|
|
109

Проекция скорости определяется формулой (1.24). Таким образом, величины v и a - алгебраические. По знаку a
- алгебраические. По знаку a
нельзя судить, будет ли движение замедленным или ускоренным. Исходя из (1.24) и (1.35) легко установить, что при уско-
ренном движении точки знаки v и a одинаковые ( v > 0, a
одинаковые ( v > 0, a > 0 или v < 0, a
> 0 или v < 0, a < 0), а при замедленном движении - разные
< 0), а при замедленном движении - разные
( v > 0, |
a < 0 или v < 0, |
a |
> 0). Очевидно, что при ускорен- |
|||||
ном движении точки направления вектора скорости v |
и каса- |
|||||||
|
|
|
|
|
|
|
|
|
тельного ускорения a |
совпадают, а при замедленном движе- |
|||||||
нии противоположны (рис. 1.12). |
|
|
|
|||||
Нормальным ускорением точки называют вектор |
|
|||||||
|
|
|
n |
|
|
AC |
. |
(1.36) |
|
|
|
a |
|
lim |
|
||
|
|
|
|
t |
||||
|
|
|
|
|
t 0 |
|
|
|
Направление |
вектора |
AC / |
t совпадает с направлением |
|||||
вектора |
AC , который составляет с касательной к траектории |
|||||||
угол |
90 |
/ 2 . При |
t |
0 |
|
90°. |
|
|
Следовательно, вектор нормального ускорения n направ- a
лен по нормали (перпендикуляру) к касательной к кривой к центру кривизны траектории в точке касания.
Модуль нормального ускорения
|
|
|
|
an |
lim |
AC |
. |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
t 0 |
|
t |
|
|
|
|
|
|
Из |
MAC следует, что AC |
2v sin( |
/ 2 ) , |
|
|
|
|||||||
an |
lim |
AC |
lim |
2v sin( |
/ 2 ) |
|
lim |
v sin( |
/ 2 ) |
|
. |
||
|
|
|
|
|
|
|
|
|
|||||
|
t 0 |
t |
t 0 |
t |
|
|
|
|
t 0 |
( |
/ 2 ) |
t |
|
110
Но lim v v , а lim sin 1- первый замечательный
1- первый замечательный
t 0 |
t 0 |
предел.
По определению, величина k lim |
|
|
d |
называется |
|
|
|
||
|
|
d |
||
t 0 |
|
|
|
|
|
|
|
|
кривизной траектории в точке М. Радиусом кривизны траектории в данной точке называют величину, обратную кривизне в этой точке =1/k.
Очевидно, что v v . Согласно (1.21),
v . Согласно (1.21),
lim |
|
|
d |
v . |
|
|
|
||
t |
|
dt |
||
t 0 |
|
|
||
|
|
|
|
Тогда модуль вектора нормального ускорения
an |
v |
v |
|
v |
2 |
. |
(1.37) |
|
|
|
|
||||
|
|
|
|
|
|||
|
|
|
|
|
Итак, модуль вектора нормального ускорения точки равен отношению квадрата модуля линейной скорости точки к радиусу кривизны траектории.
Поскольку в любой точке прямой траектории кривизна k= 0, = 1/k= , т. е. радиус кривизны прямой бесконечен и an 0 .
Поскольку радиус кривизны окружности равен радиусу окружности, в любой точке окружности k = 1/R.
Вектор полного ускорения точки равен сумме векторов касательного и нормального ускорений этой точки
|
|
n |
. |
(1.38) |
a |
a |
a |
Из теоремы Пифагора (см. рис. 1.12) следует
|
(1.39) |
a | a | ( an )2 ( a )2 . |
111

Возможны следующие частные случаи.
Прямолинейное равномерное движение (инерциальное движение). В этом случае = , v= const. Отсюда (см. (1.35) и
(1.357)): an = 0; a = 0; и поэтому а= 0. Итак, при прямолинейном равномерном движении точки ее ускорение равно нулю.
= 0; и поэтому а= 0. Итак, при прямолинейном равномерном движении точки ее ускорение равно нулю.
Прямолинейное неравномерное движение. Согласно (1.35)
и (1.37) |
|
|
и a= a |
= dv/dt. |
an = 0, поэтому a |
a |
При криволинейном движении с v= const a = d v /dt = 0;
= d v /dt = 0;
|
n |
; а = a |
n |
2 |
a |
a |
|
= v / . |
Следовательно, касательное ускорение характеризует изменение величины скорости, а нормальное - изменение направления скорости.
Движение точки, при котором величина касательного ускорения постоянна a = const, называют равнопеременным. От-
= const, называют равнопеременным. От-
сюда, согласно (1.35) dv = a dt, после интегрирования полу-
dt, после интегрирования полу-
чаем v = a t + C1. Произвольную постоянную интегрирования можно определить из начального условия: при t0 = 0 v = v 0.
t + C1. Произвольную постоянную интегрирования можно определить из начального условия: при t0 = 0 v = v 0.
Имеем v 0 = C1, следовательно, v = v 0 |
+ a t. Учитывая (1.24) |
||||
и умножая на dt, находим d |
= v 0 dt + a |
t dt. |
|
||
После интегрирования получаем |
= |
v 0 t + a |
t2/2 + C2. |
||
Произвольную постоянную C2 определяем из начального усло- |
|||||
вия при t0 = 0, |
= 0. Тогда |
0 = C2 и |
|
|
|
|
= 0 + v 0 t + a |
t2/2. |
|
||
Итак, для равнопеременного движения |
|
|
|||
v |
v 0 a t; |
0 v 0t |
0,5a t 2 . |
(1.40) |
|
112
При решении задач почти всегда можно выбрать начало отсчета координаты  так, что 0 = 0.
так, что 0 = 0.
§ 1.6. Примеры решения задач
Пример 1.1. По окружности радиусом r = 9 м движутся в одном направлении две точки: M1 и M2; первая равноускоренно, а вторая равномерно со скоростью v2 = 6 м/с. В начальный момент обе точки находились в одном положении, причем скорость первой точки равнялась нулю. Найти, за какой промежуток времени первая точка догонит вторую и найти ускорения обеих точек в конце этого промежутка времени, если координаты точек будут равны 6 м.
Решение. Пусть для начального положения при t0 = 0 0 =
0. Для точки M1 v10 = 0 и, согласно (1.40), v |
a 1t и |
|
|
|
0,5a t 2 |
. Для второй точки, согласно (1.25), |
= v |
2 |
t. Обе |
1 |
|
|
|
|
точки в момент, когда первая догонит вторую, будут иметь координаты = 6 м в момент времени t = / v 2 = 1 с;
a 1 2 t 2
t 2  12 м/с2. Скорость первой точки при t = 1 с v1=a
12 м/с2. Скорость первой точки при t = 1 с v1=a t= 12 м/с2. Нормальное ускорение первой точки a1n v12
t= 12 м/с2. Нормальное ускорение первой точки a1n v12  r
r  16
16
м/с2. Согласно (1.39) a1 |
|
( a1n )2 ( a1 )2 20 м/с2. |
|
Величина ускорении точки M2 не зависит от времени, так |
|||
как при v = const a 2 |
dv2 |
0 , и величина полного ускорения |
|
dt |
|||
|
|
||
равна величине нормального ускорения а2 = аn2 = v22/r = 4 м/с2.
Пример 1.2. Движение точки задано уравнениями х = t2 и у = t - t3/3 (х, у - в м, t - в с). Найти траекторию и закон движения точки по траектории, отсчитывая расстояние от начального положения точки (при t0 = 0 0 = 0), а также найти скорость,
113

касательное, нормальное и полное ускорения и радиус кривизны траектории в момент времени t1 = 1 с.
|
Решение. В начальный мо- |
|
мент t0 = 0 с. Точка находилась |
|
в начале координат, так как по |
Рис. 1.13. |
заданным уравнениям движения |
x0 = 0, y0 = 0. Из уравнений движения исключаем параметр -
|
|
|
|
|
|
|
время t, t |
x , взяв положительное значение корня, так как по |
|||||
определению t 0. |
|
|
||||
|
|
|
|
|
|
|
Имеем y |
|
|
|
x |
|
( 3 x ), y 0 при x1 = 3 м и при x0 =0 . Легко |
3 |
|
|||||
|
|
|
||||
видеть, что при 0 < х < 3 у > 0. При x > 3, 3 - х < 0, и, следовательно, y < 0. На рис. 1.13 изображена траектория точки. Из
(1.22) и (1.23) следует
|
dx |
|
dy |
|
|
|
|
|
vx |
2t, vy |
1 t 2 |
; v |
vx2 v2y 1 t 2 . |
||||
|
|
|||||||
dt |
dt |
|||||||
|
|
|
|
|
|
|||
При t1 = 1 с v1 = 2 м/с.
Из (1.26) находим закон движения точки по траектории
|
|
|
|
t |
|
t |
|
|
|
t |
t |
|
|
||
|
OM |
|
v dt |
|
|
( 1 t 2 )dt |
dt |
t 2 dt t t 3 / 3 . |
|||||||
|
|
|
|
0 |
|
0 |
|
|
|
|
0 |
0 |
|
|
|
Из (1.29) и (1.30) следует |
|
|
|
|
|||||||||||
|
|
d |
2 x |
|
|
|
|
|
d 2 y |
|
|
|
|
|
|
ax |
|
2м / с2 |
; ay |
2t м / с2 ; a |
4 4t 2 . |
||||||||||
|
dt2 |
dt2 |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
||||||
При t1 = 1 с a1 = 2 |
|
2 м/с2. |
|
|
|
|
|||||||||
Касательное ускорение находим по (1.35) |
|
|
|||||||||||||
|
|
|
|
|
|
|
|
a |
|
dv |
2t . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
114

При t1 = 1 с a1 =2 м/с2. Нормальное ускорение по (1.39)
a1n 
 a12 ( a1 )2
a12 ( a1 )2  2 м/с2.
2 м/с2.
Радиус кривизны траектории по (1.37)
|
v2 |
|
|
|
1 |
2 м. |
|
1 |
an |
||
|
|||
|
|
||
|
1 |
|
Рис. 1.14.
Рис. 1.15.
мени t1  3с.
3с.
§ 1.7. Задачи для самостоятельного решения
1.1. Линейка эллипсографа длиной АВ= l = 1 м скользит своими концами по осям Ох и Оу. Конец линейки А движется по оси Ох так, что ОА= 0,1 t м. Составить уравне-
ние движения точки В и определить скорости и ускорения точек А и В
(рис. 1.14).
1.2. Круглый эксцентрик диаметром 2 r вращается вокруг оси О, отстоящей от геометрической оси С эксцентрика на расстояние, равное ОС= a = r / 3 . Угол поворота эксцентрика изменяеется по закону
 0,5 t , где угол измеряется в радианах,
0,5 t , где угол измеряется в радианах,
r - в см, а t - в сек. Получить уравнение прямолинейного движения точки М стержня MN , движущегося в вертикальных направляющих (рис. 1.15), а также, скорость и ускорение точки в момент вре-
115

1.3. По заданным уравнениям движения точки в декартовых координатах найти траекторию, скорость и ускорение этой точки:
1) |
x |
0,5a( ekt |
e kt ) |
ach( kt ); |
y 0,5b( ekt e |
kt ) bsh( kt ) ; |
2) |
x |
R sin( t ); |
y |
R( 1 cos( 2 |
t )); z R sin( t ) , |
|
где координаты х, у, |
z заданы в метрах, время t |
- в секундах. |
||||
1.4. Составить уравнение движения точки М колеса трамвая, отстоящей от оси колеса на расстояние r = 0,8 м, если трамвай движется равномерно по прямолинейному участку пути со скоростью vC  16 м/c, и найти скорость и ускорение
16 м/c, и найти скорость и ускорение
точки М. Колесо имеет радиус R  1 м и катится по рельсу без
1 м и катится по рельсу без
|
скольжения. В начальный мо- |
|
мент времени точка М |
|
мает нижнее положение на |
|
вертикальном диаметре ко- |
|
са. Начало системы координат |
|
расположить в точке контакта |
|
колеса с рельсом в начальный |
Рис. 1.16. |
момент времени. Ось х напра- |
вить в сторону движения колеса, ось у вертикально вверх.
1.5. Линейка эллипсографа длиной АВ= l = 10 
 2 м скользит своими концами А и В по двум направляющим, обра-
2 м скользит своими концами А и В по двум направляющим, обра-
зующим между собой угол  135 . Найти траекторию, скорость и ускорение точки М линейки, если AM / BM 3 и закон движения ползуна А выражается уравнением ОА= s =
135 . Найти траекторию, скорость и ускорение точки М линейки, если AM / BM 3 и закон движения ползуна А выражается уравнением ОА= s =
20 sin(0,5 t ) (рис. 1.16).
1.6.Вагонетка движется равномерно по закругленному
пути радиуса R  600м, так, что ускорение ее некоторой точки равно a
600м, так, что ускорение ее некоторой точки равно a  0,0026 м/с2. Найти скорость этой точки вагонетки.
0,0026 м/с2. Найти скорость этой точки вагонетки.
1.7.Точка движется с постоянным тангенциальным ускорением a по окружности радиуса R без начальной скорости. Через какое время после начала движения касательное и нормальное ускорения будут иметь одинаковые модули?
116

|
1.8. Точка движется по окруж- |
||||
|
ности. В некоторый момент времени |
||||
|
ее скорость стала равна v , а ускоре- |
||||
|
ние направлено по хорде MN l |
||||
|
(рис. 1.17). Найти ускорение точки в |
||||
|
этот момент. |
|
|
|
|
|
1.9. Автомашина идет по вы- |
||||
|
пуклому вверх мосту АВ (рис. 1.18). |
||||
|
Ее некоторая точка М описывает при |
||||
Рис. 1.17. |
этом параболу y |
0,005x |
2 |
, а рас- |
|
|
|
||||
|
стояние s |
AM , отсчитываемое от |
|||
|
точки А вдоль дуги параболы, изме- |
||||
|
няется по закону s |
( 2 / 3 )t 3 |
|||
|
9t 2 60t , где х и у выражены в |
||||
|
метрах, а время t - в секундах. Опре- |
||||
Рис. 1.18. |
делить скорость и ускорение точки М |
||||
|
в тот момент времени, когда она на- |
||||
ходится в вершине параболы, если в этот момент времени скорость машины достигает минимума.
1.10. Даны уравнения движения точки в декартовых координатах
x akt, x 0,5a( ekt e kt ) ach( kt ) .
Найти траекторию точки, закон движения точки по траектории и радиус кривизны траектории в зависимости от координаты у.
1.11. Даны уравнения движения точки x 2t , y 4t 2 ,
z 3t 2 , где координаты выражены в метрах, а время t – в секундах.
Найти радиус кривизны траектории в точке, где скорость
vточки равна 5 м/с.
1.12.От самолета, который летит со скоростью v0 на вы-
соте H над Землей, в некоторый момент времени отделяется
117