

Учебное пособие 1828
.pdf(6.19) |
|
|
Векторы и |
|
дают при |
сложении нуль, и оказывает- |
||
ся, что движение тела в |
||
этом случае можно рассмат- |
||
ривать как мгновенное вра- |
||
щение вокруг оси Рр с угло- |
||
вой скоростью |
= |
. Этот |
результат был раньше полу- |
||
чен с использованием мгно- |
||
венного центра скоростей. Рис. 6.16. Сравнивая равенства (3.4) и
(6.17), легко видеть, что точка Р для сечения (S) тела является мгновенным центром скоро-
стей ( vP 0 ). Отсюда кроме прочего следует, что поворот тела вокруг осей Аа и Рр происходит с одной и той же угловой скоростью , т. е. что вращательная часть движения не зависит от выбора полюса.
|
|
|
6.7.2. Винтовое движение ( v || |
|
) |
Если сложное движение тела слагается из вращательного вокруг оси Аа с угловой скоро-
|
|
|
стью |
|
и поступательного со скоростью v , на- |
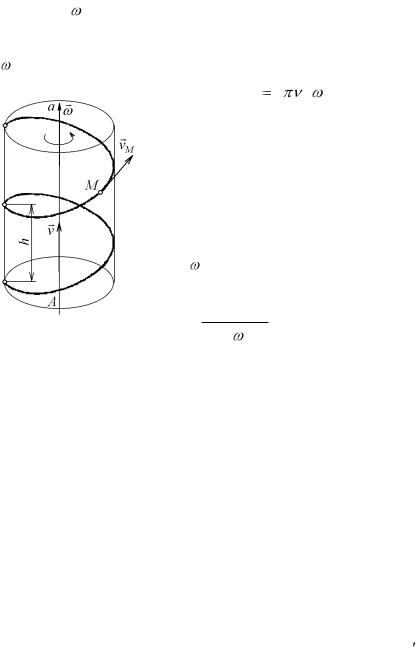
правленной параллельно оси Аа (рис. 6.17), то такое движение тела называется винтовым.
Ось Аа называется осью винта. Если векто-
|
|
|
ры v и |
|
направлены в одну сторону, то при |
принятом правиле изображения векторов угловых скоростей винт будет правым; если в разные стороны - левым.
Расстояние, проходимое за время одного оборота любой точкой тела, лежащей на оси винта, называется шагом h винта. Если величи-
208
ны v и постоянны, то шаг винта также будет постоянным. Обозначая время одного оборота через Т, получаем в этом случае v T = h и
T = 2π, откуда
h 2 / .
При постоянном шаге любая точка М тела, не лежащая на оси винта, описывает винтовую линию. Скорость точки М, находящейся от оси винта на расстоянии r, складывается из
поступательной скорости v и перпендикулярной к ней скорости r, получаемой во вращательном движении. Следовательно,
vM 
 v2
v2  2r 2 .
2r 2 .
Скорость vM направлена по касательной к винтовой линии. Если цилиндрическую поверхность, по которой движется точка
M, разрезать вдоль образующей и развернуть на плоскость, то винтовая линия обратится, очевидно, в прямую, наклоненную к основанию цилиндра под углом  (tgα = h/2πr).
(tgα = h/2πr).
6.7.3. Скорость поступательного движения образует
произвольный угол с осью вращения. Сложное движение, совершаемое телом в
этом случае (рис. 6.18), является общим случаем движения свободного твердого тела, рассмотренного в § 4.2.
|
|
|
Разложим вектор v |
(рис. 6.18) на две составляющие: v |
, |
|
209 |
|

направленную вдоль вектора |
|
с модулем |
v |
vcos |
|
|
|||||||
|
и v , |
|
|||||||||||
перпендикулярную к |
|
с модулем v v sin |
|
|
|
|
|
||||||
|
. Скорость v " |
, |
|||||||||||
можно заменить парой угловых скоростей |
|
= |
|
и |
= - |
||||||||
так же как на рис. 6.16, после чего векторы |
|
и |
|
можно от- |
|||||||||
бросить. Расстояние АС найдем по формуле (6.19) |
|
|
|
||||||||||
|
AC |
v |
|
|
v sin |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Тогда у тела остается вращение с угловой скоростью
и поступательное движение
со скоростью v '. Следовательно, распределение скоростей точек тела в данный момент времени будет таким же, как при винтовом движении вокруг оси Сс с угловой скоростью  = и поступательном движении со скоро-
= и поступательном движении со скоро-
стью v vcos .
vcos .
Рассмотренные преобразования, показанные на рис. 6.18, приводят к замене полюса А на полюс С. При этом меняется в общем
Рис. 6.18. случае только поступательная скорость, а угловая скорость остается
постоянной.
Полученный результат показывает, что и в общем случае движения угловая скорость тела
при перемене полюса не изменяется ( |
= ), |
|||
а меняется только поступательная скорость |
||||
|
|
|
|
|
( v v ). |
|
|
|
|
|
Поскольку при движении свободного твердо- |
|||
|
|
|
|
|
го тела величины v , |
|
и α будут в общем слу- |
||
чае все время изменяться, будет непрерывно
210

меняться и положение оси Сс. Поэтому ось Сс называют мгновенной винтовой осью.
Таким образом, движение свободного твердого тела можно еще рассматривать как состоящее из серии мгновенных винтовых движений вокруг непрерывно изменяющихся вин-
товых осей.
§ 6.8. Задачи для самостоятельного ре-
Рис. 6.19. шения
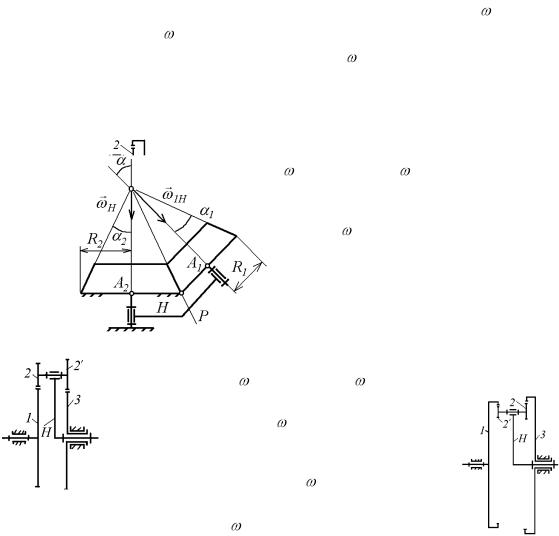
проверить ответы 6.1. В дифференциальном механизме (рис.
6.19) входными звеньями являются зубчатое лесо 1 и водило Н, на котором расположена ось сателлитов 2 и 2 . Зная угловые скорости
. Зная угловые скорости
леса 1 и водила H , а также числа зубьев всех колес, найти угловую скорость 3 колеса
3.
6.2. В планетарном механизме (рис. 6.20) Рис. 6.20. входным звеном является водило Н.
Зная угловые скорости колеса H , а также числа зубьев всех колес, найти угловую скорость 3 зубчатого
колеса 3.
211
6.3. В дифференциальном механизме (рис. 6.21) входными звеньями являются зубчатое колесо 1 и водило Н, на котором расположена ось сателлита 2. Зная угловые скорости колеса 1
и водила H , а также числа зубьев всех колес, найти угловую скорость 3 колеса 3.
6.4. В дифференциальном механизме (рис. Рис. 6.21. 6.22) входными звеньями являются зубчатое
колесо 1 и водило Н, на котором расположена ось сателлитов 2 и 2’. Зная
угловые скорости колеса 1 и водила H , а также
числа зубьев всех колес, найти угловую скорость 3 колеса 3.
6.5. В дифференциальном механизме (рис. 6.23) входными звеньями являются зубчатое коле-
Рис. 6.22. со 1 и водило Н, на котором расположена ось
сателлитов 2 и 2’. Зная угловые ско-
рости колеса |
1 |
и водила |
H , а так- |
Рис. 6.23. |
|
|
|||||
же числа зубьев всех колес, найти |
|
||||
угловую скорость |
3 |
колеса 3. |
|
||
6.6. Водило Н вращается относи- |
|
||||
тельно вертикальной оси (рис. 6.24) |
|
||||
с угловой скоростью |
H . Относи- |
|
|||
тельно водила вращается диск с уг- |
|
||||
ловой скоростью |
r . Получить формулу |
|
|||
для определения угловой скорости диска |
|
||||
относительно неподвижной системы отсчета. 6.7. Определить угловую скорость водила Н
планетарной передачи (рис. 6.25) найти отно-
212
Рис. 6.24.

сительную и абсолютную угловые скорости колеса 1, находящегося в зацеплении с неподвижным колесом 2. Даны радиусы R1 и R2 колес, а
также углы 2 1 и 2 2 .
6.8. Зная числа зубьев всех зубчатых колес планетарного механизма (рис. 6.19.), найти передаточное отношение от колеса 1 к
водилу Н при остановленном колесе 3.
6.9. Зная числа зубьев всех зубчатых ко-
Рис. 6.25. |
лес планетарного механизма полу- |
|
ченного из дифференциального ме- |
ханизма (рис. 6.22.) закреплением зубчатого колеса 1, найти передаточное отношение от колеса 3 к водилу.
6.10. Зная числа зубьев всех зубчатых колес планетарного механизма полученного из дифференциального механизма (рис. 6.23.) закреплением зубчатого колеса 1, найти передаточное отношение от колеса 3 к водилу.
213
ЗАКЛЮЧЕНИЕ
Данное учебное пособие содержит тексты лекций по кинематикепервому разделу курса «Механика». Рассмотрены основные виды движений точки и тела, в том числе и сложное движение.
Материал учебного пособия может быть использован как для изучения методов кинематики в рамках лекционного курса, так и для самостоятельного освоения этих методов. В данном учебном пособии приведено достаточно много примеров решения типовых задач кинематики с подробными пояснениями. К каждой главе данного учебного пособия приведено достаточной количество задач для самостоятельного решения с ответами для закрепления материала. Последнее обстоятельство особенно важно для студентов заочной формы обучения.
Издаваемая литература по теоретической механике, рассчитанная на курсы большого объема, достаточно сложна для студентов, изучающих прикладную механику или механику, в которой теоретическая механика является только одним из разделов.
Данная работа позволит существенно восполнить имеющиеся пробелы в учебной литературе по механике и прикладной механике, поскольку рассчитана на изложение раздела «Кинематика» в рамках этих курсов. Она будет полезна для студентов всех немеханических специальностей при изучении лекционного материала по кинематике, выполнении расчетно – проектировочных и курсовых работ, курсовых проектов.
214

|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ОТВЕТЫ К ЗАДАЧАМ |
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
1.1. yB |
1 |
|
|
0,01t 2 ; |
vA |
|
|
0,1 м/c; aA |
0 ; |
vB |
- |
|||||||||||||||||||||||||||
0,01 |
t / |
|
|
|
1 0,01t 2 |
|
м/c; |
aB |
-0,01/( 1 |
0,01t 2 )3 / 2 |
|
|||||||||||||||||||||||||||
м/c2; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1.2. y |
|
a(cos( 0,5 |
|
t ) |
9 |
sin2 ( 0,5 t ) ) ; |
vM |
0,5 a |
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 a / |
|
|
|
|
см/с2; |
|
|
|
|
|
|
|
||||||||||
|
см/с; aM |
0,125 |
|
2 |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
1.3. 1) |
|
|
|
x2 |
|
|
y 2 |
|
1; |
vx |
aky / b ; |
vy |
bkx / a ; |
|
|
|
|
|||||||||||||||||||||
|
|
|
a 2 |
b2 |
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
v |
( kab ) |
|
a4 x2 |
|
b4 y2 ; |
ax |
|
k 2 x ; |
ay |
|
k 2 y ; |
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
a |
k 2 |
|
|
x2 |
|
|
|
|
y2 ; 2) z |
|
x ; |
|
y |
2x2 / R ; |
vx |
R |
cos |
t ; |
||||||||||||||||||||
vx |
2 |
R sin 2 t ; |
vz |
|
R |
|
cos |
|
t ; |
ax |
|
R |
2 sin |
t ; |
|
a y |
||||||||||||||||||||||
4R |
2 cos 2 t ; |
az |
|
|
|
R |
2 sin |
|
t ; |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
1.4. xM |
|
|
|
16t |
|
|
0,8 sin16t ; |
|
yM |
1 |
|
0,8 cos16t ; |
|
|
|
|
||||||||||||||||||||||
vx |
16t 12,8 cos 16t ; |
|
vy |
12,8 sin16t ; ax |
204,8 sin16t ; |
|||||||||||||||||||||||||||||||||
ay |
204,8 cos16t ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
1.5. y |
|
2,5 2 sin(0,5 t ); |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
x |
10 2( 0,75cos(0,5 t ) |
sin(0,5 |
t )) ; |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
18y2 |
2( x 4 y )2 |
25 ; ax |
x |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
2 x ; |
|
|
|
|
||||||||||||||||||||
0,625 |
|
|
2( 3cos(0,5 |
|
t ) |
|
4 sin(0,5 |
t )) |
0,25 |
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
2 |
|
|
|
2 y ; |
|
|
|
|
|
|
||||||||||||||||||||
ay |
y |
|
|
|
|
|
0,625 |
2 sin(0,5 t ) |
0,25 |
vx |
x |
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
1,25 |
|
|
|
2( 3 sin(0,5 |
t ) |
|
4 cos(0,5 |
t )) ; |
vy |
y |
1,25 |
2 |
|
|
||||||||||||||||||||||||
cos(0,5 t ) ;
1.6.1,25 м/с2;
1.7.t 
 R / a ;
R / a ;
215

1.8. a |
2v2 / l ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
1.9. |
100( 1 |
0,0001x2 )3 / 2 ; |
|
|
|
100 м; |
|
|
|
|||||||||||||||||
v |
2t 2 |
18t |
60 ; a |
|
4t |
18 ; |
an |
|
v2 / |
; |
v |
19,5 |
||||||||||||||
м/с; a |
|
3,8 м/с2; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
1.10. y |
ch( x / a ) ; vx |
ak ; |
vy |
aksh( kt ) ; |
|
|
|
|||||||||||||||||||
v |
akch( kt ) ; |
s |
ash( kt ); |
ax |
|
|
0 ; |
ay |
|
ak2ch( kt ) ; |
|
|||||||||||||||
a 0,5ak 2 ( ekt |
e kt |
) ; |
an |
ak 2 ; |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
0,25a( ekt |
e kt ) |
|
y2 / a ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
1.11. |
|
6,25 м; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
2v2 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
1.12. 1) |
y |
0,5gx |
; 2) |
|
l |
v |
|
2H / g ; 3) |
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
v |
|
v2 |
2gH , |
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
arctg( v |
2gH ) ; 2.1. 8.с; 2.2. |
|||||||||||||||||||||||
|
0 |
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
27 |
рад/с; |
|
9 |
|
рад/с2; 2.3. v |
25,121 |
|||||||||||||||||||
м/с; a |
|
631,04 м/с2; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
2.4. a |
|
8 |
|
2 |
м/с2; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
2.5. v |
3 |
2 r / 64 |
|
0,37 м/с; a |
9 |
4 r / 642 |
10,94 |
|||||||||||||||||||
м/c2; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
2.6. v |
nr R / 30r |
|
; |
a |
R( |
|
nr / 30r |
)2 |
; |
|
|
|
|
|
||||||||||||
|
|
|
|
1 |
|
2 |
|
|
|
|
|
1 |
|
2 |
|
|
|
|
|
|
|
|
||||
2.7. |
2 |
4 |
|
t |
с-1; |
a |
60 |
|
1 |
16 |
2 |
|
|
2,4 2 |
м/с2; |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
4 |
с-2; 2.8. x2 |
( y |
0,8 )2 |
2,25 |
|
м2; |
( t ) |
t / 30 |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
рад;; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
2.9. yA2 |
( xA |
0,5BC )2 |
OB2 ; |
|
OB |
10t |
рад/с; |
|||||||||||||||||||
OB |
10 |
рад/с2; |
vB |
5t |
м/с; aB |
5 |
|
1 |
|
100t 4 |
|
м/с2; |
||||||||||||||
2.10.v 3at2 м/с; a 6at м/с2;
2.11.n R 2 / g ;
2.12. a |
M 2 |
2 r |
; v |
M 1 |
v |
M 2 |
0,5 |
r ; |
|
|
1 |
|
|
|
1 |
||||
3.1. xA |
2r cos( |
t ); |
yA |
|
0 ; |
|
t ; |
||
3.2. xA |
( R |
r )cos( |
|
t ); |
|
yA |
( R |
r ) sin( t ) ; |
|
216

(( R / r |
1) |
t ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
3.3. |
|
v |
A |
/ AP |
0,5 с-1; v |
PC |
|
|
|
3,46 м/с; |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
C |
|
|
|
|
|
|
|
vC |
PB |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3,5 м/с; vB |
PB ; |
|
|
|
|
|
|
||||||||||||
3.4. |
2 |
v |
B |
/ O B |
4 |
/ |
3 |
|
с-1; |
1 |
v |
BA |
/ AB |
0,4 с- |
||||||
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
1; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
с-1; vB |
|
2vA sin15 =58,4 |
|
|||||||||
3.5. |
AB |
|
|
4 |
/ 3 |
|
|
см.c; |
||||||||||||
3.6. |
vBA |
|
vAtg60 = 34,6 см/c; |
aBAn |
|
|
24 см/ с2; |
|||||||||||||
aBA |
67,68 см/ с2; |
|
|
|
1,351 с-2; |
|
|
|
||||||||||||
|
2BA cos 30 |
|
|
|
|
|
|
|
||||||||||||
3.7. vB |
50 |
|
3 см/с; aBn |
|
150 см/ |
|||||||||||||||
с2; aBA |
|
(300+50 |
|
3 ) см/ с2; |
aB |
|
|
300 см/ с2; |
||||||||||||
3.8.aBAn  80 см/ с2; aBA
80 см/ с2; aBA  40 см/ с2; aB
40 см/ с2; aB  35,8 см/ с2;
35,8 см/ с2;
3.9.20 aC  20 см/ с2; vB
20 см/ с2; vB  0,69 м/с; aB
0,69 м/с; aB  7,62 м/c2;
7,62 м/c2;
3.11. aA |
|
v2 R /( r( R |
r )) ; aB |
v2 ( R |
2r ) /( r( R |
r )) ; |
|||||||||
3.12. aB = 0,8 м/c2; aC = 0,15 м/c2; |
aD = 0,854 |
||||||||||||||
м/c2; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4.1. |
|
a2 |
b2 |
2ab cos c ; |
|
|
|
|
|
||||||
4.3. |
|
|
|
cos( |
2 |
) |
; |
|
2 cos( |
2 |
)cos |
; |
|||
|
p |
|
|
|
|
|
|
|
|
|
|
||||
|
sin 2 |
|
|
|
p 2 cos |
cos( |
) |
||||||||
|
|
|
|
|
|
|
|
||||||||
4.4. |
v R2 |
r 2 /( Rr ) ; |
v /( Rr ) ; |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
4.5. Проекции углового ускорения на оси х, у,
z равны: |
x |
a / r ; |
y |
v2 |
/( Rr ); |
z |
a / r ; |
|
|
|
|
|
|||
4.6. aD |
0,36 м/с2 |
направлено к точке О; aC |
|||||
1,48 м/с2 направлено перпендикулярно линии
ОС;
5.1. x1 |
1,5 sin t sin(0,5 t ); |
y1 1,5 cos |
t cos(0,5 t ) 2,5 ; абсолютное движение |
это движение по вращающемуся эллипсу
217