

Учебное пособие 1828
.pdfточка М. Движение точки М происходит в вертикальной плоскости с постоянным ускорением g (рис. 1.19).
Определить: 1) уравнение траектории точки в неподвижной системе отсчета Оху, начало которой совпадает с точкой М в момент отделения ее от самолета; 2) расстояние l , на котором должна отделиться точка от самолета, чтобы попасть в точку А на поверхности Земли; 3) скорость точки М и
Рис. 1.19. угол между вертикалью в положении
А.
118

Глава 2. ПРОСТЕЙШИЕ ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА
§ 2.1. Поступательное движение
Поступательным называют движение твердого тела, при котором все прямые, соединяющие любые две точки тела, перемещаются параллельно своим первоначальным положениям (сохраняют свою ориентацию в пространстве).
Теорема 2.1. При поступательном движении твердого тела траектории всех его точек имеют одинаковую форму и при на-
Рис. 2.1. |
|
|
ложении совпадают. |
|
|
|
|
|
Доказательство. На рис. 2.1 изображены векторы - радиу- |
||
|
|
|
|
сы |
rA и |
rB |
двух произвольных точек А и В тела, имеющих на- |
чало в неподвижной точке О. Введем вектор AB . Этот вектор постоянен, так как постоянен его модуль (как расстояние между двумя точками в абсолютно твердом твердом теле), и сохраняется его направление в соответствии с поступательным движением тела. Поскольку в любой момент времени
|
|
|
rB |
rA |
AB , траектория точки В получается из траектории |
точки А |
параллельным смещением всех ее точек на постоян- |
|
ный вектор AB . Таким образом, траектории точек А и В действительно при наложении совпадут.
Теорема 2.2. При поступательном движении твердого тела для каждого момента времени скорости и ускорения всех точек тела соответственно равны между собой.
Доказательство. Для каждого момента времени верно ра-
венство rB rA AB , причем AB - постоянный вектор. Диф-
119

ференцируя по времени это равенство с учетом (1.5) и
d AB |
0 |
, получаем |
|
|
|||
dt |
|||
|
|
(1.13), находим aB
|
|
vB |
vA . Дифференцируя еще раз, согласно |
aA . Теорема доказана.
Из последних двух следует, что поступательное движение твердого тела характеризуется движением одной из его точек и изучение этого движения сводится к изучению движения одной из точек тела.
§ 2.2. Вращение твердого тела вокруг неподвижной оси
Вращением твердого тела вокруг неподвижной оси называют движение тела, при котором две любые его точки (например О и O1), лежащие на этой оси, остаются неподвижными (рис. 2.2).
Все точки на прямой OO1, называемой осью вращения l тела, также неподвижны. Траектории всех точек тела - окружности, плоскости которых перпендикулярны оси вращения, а центры
лежат на этой оси. Пусть плоскость Q1 неподвижно скреплена
с телом, а плоскость Q неподвижна, и угол  между этими плоскостями при t0 = 0 равен нулю. Считая, расположение тела относительно плоскости Q1 известным, можно определить положение тела относительно плоскости Q, которое определяется только углом . Поэтому равенство
между этими плоскостями при t0 = 0 равен нулю. Считая, расположение тела относительно плоскости Q1 известным, можно определить положение тела относительно плоскости Q, которое определяется только углом . Поэтому равенство
= (t), |
(2.1) |
является законом, или уравнением, вращательного движения тела. Существуют две характеристики движения твердого тела.
120
2.2.1. Угловая скорость При вращении твердого тела вокруг неподвижной оси
первую производную по времени от угла поворота тела называют угловой скоростью тела
d |
|
dt . |
(2.2) |
Поскольку угол измеряется в радианах, единицей измерения угловой скорости в СИ является 1 с-1, что означает радиан в секунду.
Равномерным называют вращение твердого тела с постоянной угловой скоростью: = const. Из (2.2) следует, что d =
dt. Считая, что = const, после интегрирования, получаем = t + С. При t0 = 0 0 = 0, и, следовательно, C = 0. Отсюда
=t т.е.
/ t . |
(2.3) |
Во многих случаях при описании вращательных движений удобно считать угловую скорость вектором. Вектор угловой скорости имеет модуль равный  и направлен вдоль оси вращения тела или точки так, чтобы, глядя в направлении, противоположном направлению этого вектора, можно было видеть вращение происходящим против хода часовой стрелки.
и направлен вдоль оси вращения тела или точки так, чтобы, глядя в направлении, противоположном направлению этого вектора, можно было видеть вращение происходящим против хода часовой стрелки.
В технике часто используется частота вращения, которая измеряется числом оборотов в минуту. Из (2.3) следует, что угловая скорость для равномерного вращения является углом поворота в единицу времени. За один оборот тело описывает угол 2 рад, а если тело имеет n об/мин, то за минуту оно опишет угол 2 n рад. Отсюда следует, что за 1 с угол поворота тела
рад, а если тело имеет n об/мин, то за минуту оно опишет угол 2 n рад. Отсюда следует, что за 1 с угол поворота тела
( 1/ с ) |
n( об / мин ) / 30 . |
(2.4) |
2.2.2. Угловое ускорение
121
При вращении твердого тела вокруг неподвижной оси первую производную по времени от угловой скорости тела называют его угловым ускорением
d |
|
dt . |
(2.5) |
Единица измерения [ ] = 1/с2. Сравнивая (2.2) и (2.5), находим
d 2 |
|
dt 2 . |
(2.6) |
Во многих случаях при описании вращательных движений удобно считать угловое ускорение вектором. Вектор углового ускорения имеет модуль равный  и при вращении относительно неподвижной оси направлен вдоль оси вращения тела или точки так же, как и вектор при
и при вращении относительно неподвижной оси направлен вдоль оси вращения тела или точки так же, как и вектор при  0 , или в противоположном направлении при
0 , или в противоположном направлении при  0 .
0 .
Равнопеременным называют вращение твердого тела, при котором величина углового ускорения постоянна  = const. Из (2.5) d = dt. Интегрируя и считая, что при t0 = 0 = 0, получаем
= const. Из (2.5) d = dt. Интегрируя и считая, что при t0 = 0 = 0, получаем
= |
0 + |
t. |
(2.7) |
Из (2.1) и (2.6) следует: d |
= |
0 dt + tdt. Интегрируя еще |
|
раз при начальном условии t0 = 0, |
0 = 0, получаем |
|
|
0t |
0,5 |
t2 . |
(2.8) |
2.2.3.Линейные скорость, касательное
инормальное ускорения
Из математики известно, что  = r , где r - радиус окружности,
= r , где r - радиус окружности,  - криволинейная координата точки на окружности, а
- криволинейная координата точки на окружности, а  - центральный угол, соответствующий координате
- центральный угол, соответствующий координате  и выраженный в радианах. Учитывая (1.10), (1.21), (1.23), (2.2)
и выраженный в радианах. Учитывая (1.10), (1.21), (1.23), (2.2)
122

и (2.5), получаем выражения для линейной скорости и касательного и нормального ускорений точки
v |
|
d |
|
|
|
d |
( r |
) |
|
|
|
r |
d |
|
|
|
r |
, |
(2.9) |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
dt |
|
|
|
dt |
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|||||||
a |
|
|
dv |
|
|
|
d |
( r |
) |
|
r |
|
d |
|
|
|
r |
, |
(2.10) |
|||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
dt |
|
|
|
dt |
dt |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
an |
|
|
v2 |
|
|
|
( r |
)2 |
|
|
|
r |
2 . |
|
(2.11) |
||||||||||
|
|
|
|
r |
|
|
|
|
r |
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Согласно (2.10) и (2.11), модуль полного ускорения точки
a |
a2 an2 r 2 |
4 . |
(2.12) |
Полное ускорение образует с нормальным ускорением точки угол
arctg( a / an ) |
/ 2 . |
§2.3. Способы передачи вращательного движения
Втехнике механизмы, служащие для передачи движения называются механизмами.
Передача вращательного движения от одного вала к другому может происходить за счет силы трения. Если передача движения происходит при непосредственным соприкосновении колес, роликов, закрепленных на валах механизма, то механизм, передающий движение называется фрикционной передачей. Если для передачи движения происходит между двумя телами вращения и используется промежуточное гибкое звено – ремень, канат или цепь, то передача называется соответственно ременной, канатной или цепной. Тела, которые взаимодействуют с ремнем называют шкивами. Тела, которые взаимодействуют с цепью называются звездочка-
123
ми. Тела взаимодействующие с канатом называются блоками.
Существуют передачи зацепления, в которых основные детали имеют соответствующим образом подобранные согласованные формы, а трение не играет существенной роли. К передачам зацепления относятся различные зубчатые и червячные передачи, передачи винт – гайка, волновые и т.д.
Если передача вращения телами происходит без проскальзывания точек этих тел друг относительно друга, то окружные скорости соприкасающихся точек на поверхностях тел (шкивов, зубчатых колес, роликов) должны быть равны, то есть v1 = v2.
Согласно (2.9),
|
|
|
r1 1 = r2 2; |
1 |
|
r2 |
|
d2 |
, |
||
|
|
|
r |
|
d |
|
|||||
|
|
2 |
|
|
1 |
|
|||||
|
|
|
1 |
|
|
|
|||||
где диаметры колес d1 = 2r1; d2 = 2r2. |
|
|
|
|
|
||||||
Из (2.4) |
1 |
|
n1 |
. Для зубчатых колес числа зубьев z про- |
|||||||
|
|
||||||||||
2 |
|
n2 |
|
|
|
|
|
||||
порционально длинам окружностей колес и, следовательно,
пропорционально диаметрам колес: |
d2 |
|
z2 |
. |
|
|
|||
|
d1 |
|
z1 |
|
Валы, шкивы (и т. д.), получающие вращение от других механизмов, называют входными, а передающие вращение другим механизмам - выходными.
Передаточным числом называют отношение угловой скорости входного вала к угловой скорости выходного вала. Без учета скольжения ремня по шкивам имеем
i |
1 |
|
n1 |
|
r2 |
|
d2 |
|
z2 |
. |
(2.13) |
|
|
|
|
|
|
|
|
||||
|
2 |
|
n2 |
|
r1 |
|
d1 |
|
z1 |
|
|
124
§ 2.4. Примеры решения задач
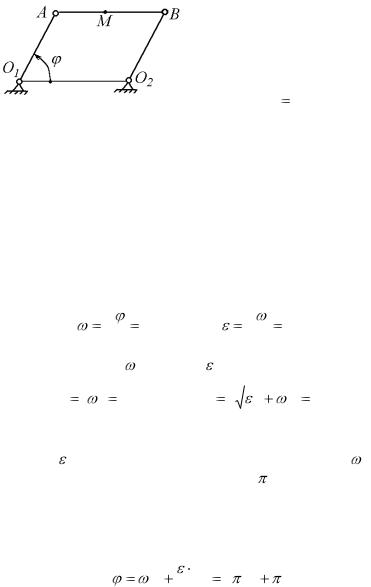
Пример 2.1. Два параллельных звена (кривошипа) O1A и O2B вращаются вокруг неподвижных осей O1 и O2 , причем угол поворота в период разгона изменяется по закону  3t 3 / 8 ; O1A = O2B =
3t 3 / 8 ; O1A = O2B =
l = 60 см. Определить скорость и ускорение точки M звена AB (ша-
туна) в момент времени t= 4/3= 1,333 с (рис. 2.3).
Решение. При произвольном угле  четырехзвенник O1ABO2 — параллелограмм, и поэтому шатун AB, будучи все время параллельным O1O2, движется поступательно. Отсюда следует, что для каждого момента времени скорости и ускорения всех точек шатуна соответственно равны между собой и равны скорости и ускорению точки А - конца кривошипа O1A.
четырехзвенник O1ABO2 — параллелограмм, и поэтому шатун AB, будучи все время параллельным O1O2, движется поступательно. Отсюда следует, что для каждого момента времени скорости и ускорения всех точек шатуна соответственно равны между собой и равны скорости и ускорению точки А - конца кривошипа O1A.
Согласно (2.2), (2.5), (2.9) и (2.12), получаем
|
|
d |
|
|
9 |
t |
2 |
( 1 / c ) ; |
d |
|
9 |
|
t( 1 / c |
2 |
) . |
||
|
|
dt |
8 |
|
dt |
4 |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||
При t1 = 4/3 с |
|
1 =2 (1/с), |
1 = 3 (1/с2). |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
v1 |
l 1 |
120 см/с; a1 |
l |
2 |
4 |
|
|
|
|||||||||
1 |
1 |
|
300 см/с . |
||||||||||||||
Пример 2.2. Угловое ускорение вращающегося тела по- |
|||||||||||||||||
стоянно |
= 4 (1/с2), а начальная угловая скорость 0 = 6 (1/с). |
||||||||||||||||
Сколько оборотов сделает тело за t = |
с? |
|
|
|
|
||||||||||||
Решение. Поскольку угловое ускорение постоянно, рассматриваемое движение является равноускоренным вращением. Согласно (2.8),
|
t 2 |
|
||
0t |
|
2 ( 3 |
) рад, |
|
2 |
||||
|
|
|
||
125
Nоб |
|
( 3 |
)об 6 ,14об. |
|
2 |
||||
|
|
|
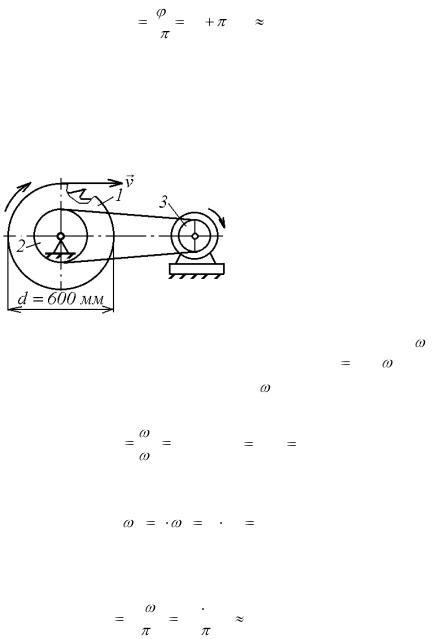
Пример 2.3. Дисковая пила 1 (рис. 2.4) имеет диаметр 600 мм. На валу пилы находится шкив 2 диаметра 300 мм. Шкив соединен бесконечным ремнем со шкивом двигателя 3 диаметром 120 мм. С какой угловой скоростью должен вращаться шкив
двигателя, чтобы скорость зубьев пилы не превышала 15 м/с. Определить передаточное число ременной передачи?
Решение. Пила 1 и шкив 2 жестко скреплены друг с другом и поэтому
имеют общую угловую скорость n. Согласно (2.9), скорость вершин зубьев пилы v 0,5d n , где
v = 15 м/c; dn = 600 мм = 0,6 м. Тогда n = 50 1/с. Из (2.13) сле-
дует
i |
|
д |
|
|
d2 |
, или i |
|
300 |
5 |
. |
||||||
|
n |
|
d3 |
|
120 |
|
2 |
|||||||||
|
|
|
|
|
|
|
|
|
||||||||
Поэтому, угловая скорость шкива двигателя |
||||||||||||||||
|
|
|
|
i |
|
|
|
5 |
50 |
|
125 1/с. |
|||||
|
д |
|
|
n |
2 |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Этой угловой скорости согласно (2.4) соответствует час- |
||||||||||||||||
тота вращения |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
30 |
д |
30 125 |
1200 об/мин. |
|||||||||||||
nд |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|||||||
126
§ 2.5. Задачи для самостоятельного решения
2.1.C момента выключения мотора пропеллер самолета,
вращавшийся с угловой скоростью, соответствующей n  1200 об/мин, сделал до остановки 80 оборотов. Считая движение пропеллера равнозамедленным определить время, прошедшее после выключения мотора до остановки.
1200 об/мин, сделал до остановки 80 оборотов. Считая движение пропеллера равнозамедленным определить время, прошедшее после выключения мотора до остановки.
2.2.В период разгона маховик вращается относительно
своей оси по закону  0,25 t 3 . Определить угловую скорость и угловое ускорение маховика сразу после того, как он сделает
0,25 t 3 . Определить угловую скорость и угловое ускорение маховика сразу после того, как он сделает
27оборотов.
2.3.Колесо радиуса R  1 м вращается равномерно вокруг своей оси, делая один оборот за 0,25 с. Найти скорость и ускорение точки, находящейся на ободе колеса.
1 м вращается равномерно вокруг своей оси, делая один оборот за 0,25 с. Найти скорость и ускорение точки, находящейся на ободе колеса.
2.4. Вал начинает вращаться с угловой скоростью |
0 |
2 |
|
|
с-1 равноускоренно и за 10 с делает 30 оборотов. Найти ускорение точки, отстоящей от оси вращения вала на расстояние 0,5 м, в момент времени, когда скорость этой точки вала равна 2 м/с.
м/с.
2.5. Вал вращается вокруг неподвижной горизонтальной оси по закону
 ( / 16 )sin(0,75 t ) , где - угол поворота вала в радианах. Найти скорость и ускорение точки М вала, отстоящей от оси вращения вала на рас-
( / 16 )sin(0,75 t ) , где - угол поворота вала в радианах. Найти скорость и ускорение точки М вала, отстоящей от оси вращения вала на рас-
стояние r  0,8 м, в момент времени, когда угловая скорость вала достигнет максимального абсолютного значения.
0,8 м, в момент времени, когда угловая скорость вала достигнет максимального абсолютного значения.
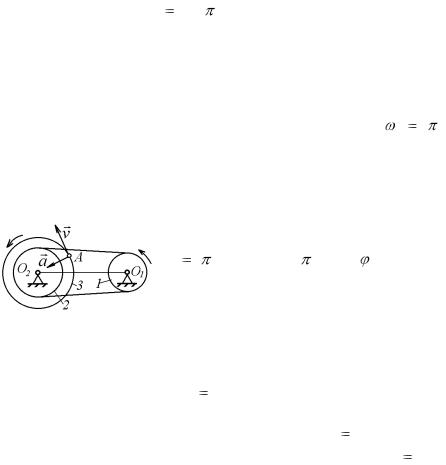
|
2.6. Шкив 1 (рис. 2.5) радиуса |
Рис. 2.5. |
O1B r1 вращается равномерно, делая |
|
n оборотов в минуту. Шкив 1 соединен |
бесконечным ремнем со шкивом 2 радиуса O2C r2 . Определить скорость и ускорение точки А шкива 3 радиуса O2 A R , жестко соединенного со шкивом 2.
127