

Статика и кинематика / Статика
.pdfВторой инвариант
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
MO = MO +O1O R |
||||||||||||||||||
|
|
|
R |
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
MO M |
O* |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
MO1 |
R = MO R + (O1O R ) R |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
O |
|
|
|
M |
O*1 |
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M |
O1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
O1 |
M O R = M O R |
|||||||
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
||
Скалярное произведение главного момента произвольной пространственной системы сил на главный вектор той же системы не зависит от выбора центра приведения и является вторым инвариантом.
I2 = MO R
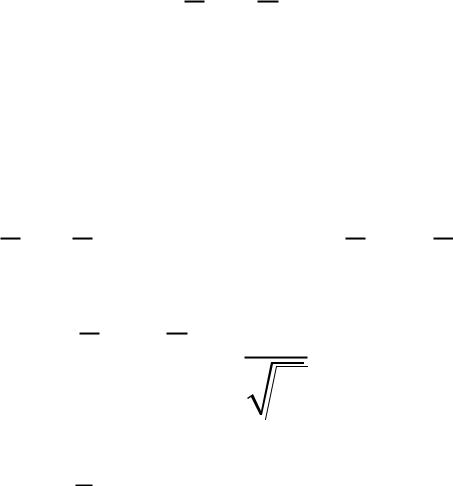
I2 = MO R
I2 = Mx Rx +My Ry +Mz Rz
I2 = MO R = MO R cos(MO , ^R)
MO cos(MO , ^R)= I2
 I1
I1
R 0
Таким образом, при проекция главного момента на направление главного вектора не зависит от выбора центра приведения.
Лекция 5
1.Приведение произвольной системы сил к динамическому винту.
2.Частные случаи приведения произвольной пространственной системы сил к равнодействующей или паре сил.
3.Теорема Вариньона.
4.Условия равновесия произвольной пространственной системы сил.

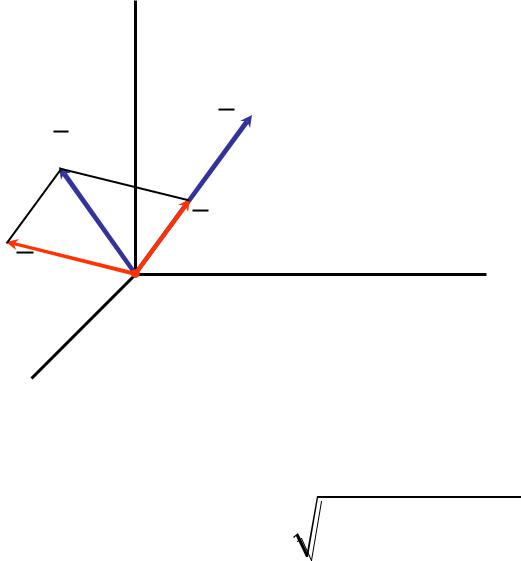
1.18 Приведение произвольной пространственной системы сил к динамическому винту
Совокупность силы, равной главному вектору, и пары сил с моментом, равным главному моменту, коллинеарным главному вектору, называется динамическим винтом или
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
динамой. ( |
R |
|
|
|
|
|
|
|
|
|
|
|
– главный момент) |
|
||||||||||||||||||||
|
– главный вектор, M |
O |
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M |
O |
= M |
* + M |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
M * |
R; |
M1 R |
|
||||||||||||||||||
|
|
|
MO |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
M |
* |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
M* = const - |
|
|
|
проекция |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
M 1 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
O |
|
|
y главного |
|
момента |
на |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
x |
|
|
направление |
|
|
|
|
главного |
|||||||||||||||||||||||
|
|
|
|
|
вектора |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
z
|
MO |
R |
|
|
|
|
|
M * |
M 1 |
O |
y |
|
x
|
|
|
|
|
|
|
|
Rx M x |
+ Ry M y + Rz |
M z |
M * = M |
cosα = |
R MO |
= |
|||||||
|
|
|
|
|||||||
O |
|
|
|
R |
|
|
Rx2 + Ry2 + Rz2 |
|||
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
MO |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
M |
* |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
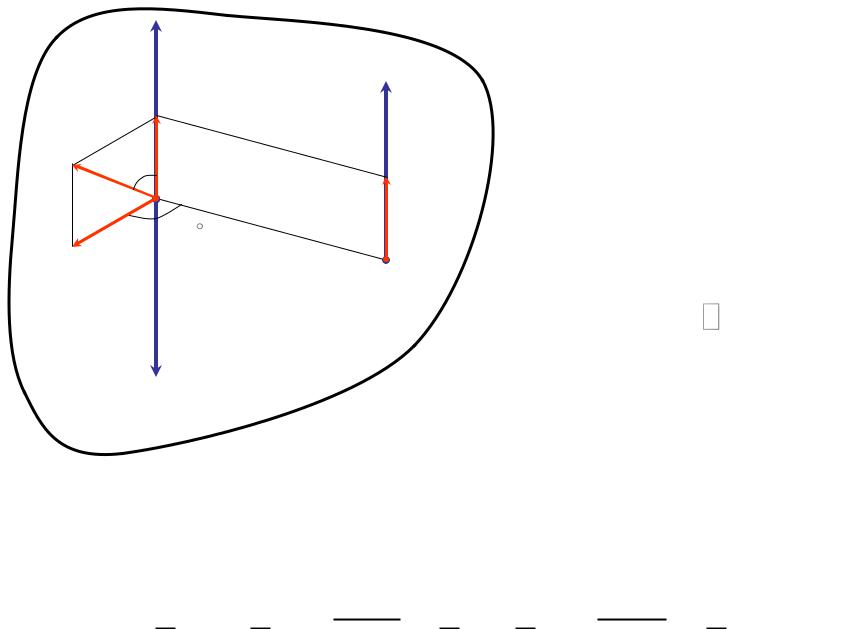
M1 = M (R1 , − R1 ) |
||||||||||||||||||||||||||||||
|
|
|
|
|
O |
|
|
|
|
|
* |
||||||||||||||||||||||||||||
|
|
|
|
|
|
M |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
90 |
|
|
|
|
|
|
|
|
|
|
|
R1 = −R1 = R |
||||||||||||||||||||||
|
|
M 1 |
|
|
|
|
|
|
M1 |
O* |
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d = |
|
|
|
|
|
(M , R ) (M * , R ) |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
−R1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
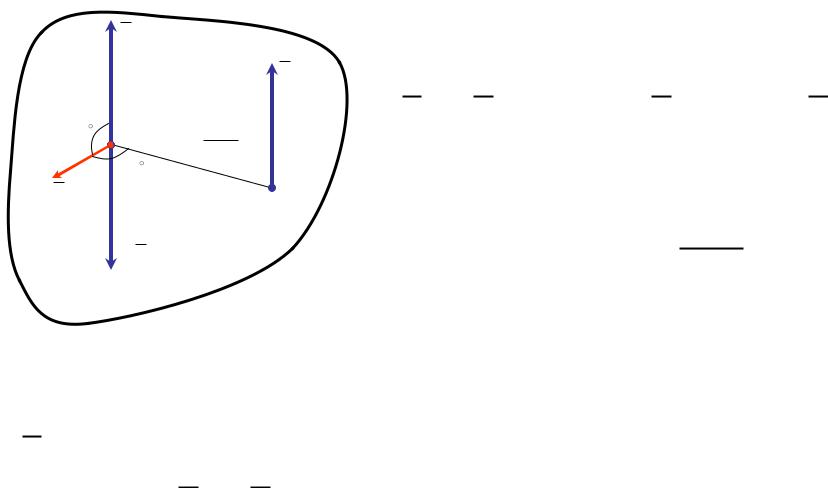
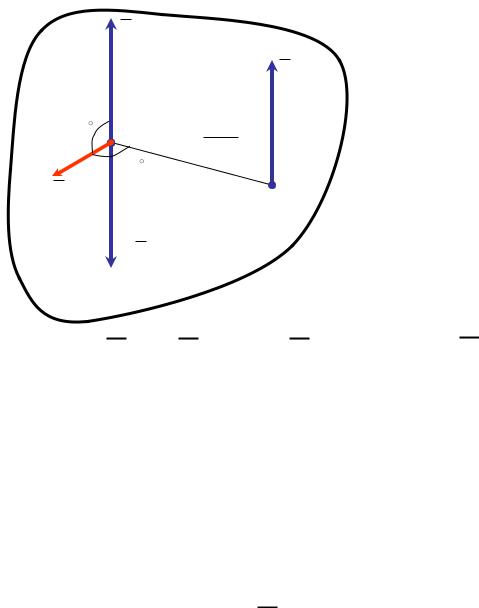
Геометрическое место центров приведения, относительно которых главный момент коллинеарен главному вектору, называется центральной осью данной системы сил.
M* = MO +O*O R = MO −OO* R
R |
M* = pR |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R1 |
|
|
p = |
R M |
O |
= |
I |
2 |
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
MO M |
* |
|
|
|
|
|
|
|
|
|
|
|
|
R2 |
|
|
|
|
I1 |
|
|||||||||||||||||||
|
|
|
|
O |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
M |
* |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
90 |
|
|
|
|
|
|
|
|
|
|
M |
O −OO* R = pR |
|||||||||||||||||||||||||
|
|
M 1 |
d = |
M1 |
O* |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
M |
O (M x , M y , M z ), R (Rx , Ry , Rz ), |
|||||||||||||||||||||||
|
|
|
|
−R1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
OO* (x, y, z ) |
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
Mx −( yRz − zRy ) = My −( zRx − xRz ) = Mz −( xRy − yRx ) = p |
||
Rx |
Ry |
Rz |
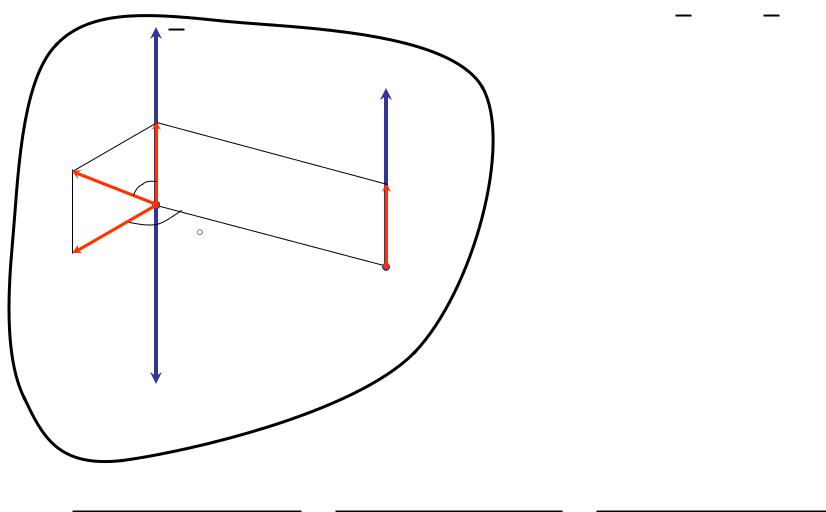
Всякая система сил, действующая на твердое тело, для которой второй инвариант не равен нулю, приводится к динаме.
1.19 Частные случаи приведения произвольной пространственной системы сил
Приведение к равнодействующей
R
R1
90 |
O |
d = |
MO |
|
R |
||
|
90 |
|
|
MO |
|
|
O* |
−R1
Чтобы система
MO R = 0, но R 0 и MO 0
OO* = MO
R
сил имела равнодействующую,
необходимо и достаточно:
1) R 0;
2) MO R = 0 для любого центра приведения.
R
R1
90 |
O |
d = |
MO |
|
R |
||
|
90 |
|
|
MO |
|
|
O* |
−R1
Приведение к паре сил
Если MO R = 0 , R = 0, но MO 0 , то главный момент не зависит от выбора центра приведения. Система сил приводится к паре с моментом MO .
Система сил эквивалентна нулю
Если при приведении произвольной системы сил оказалось, что R = 0иMO = 0, то рассматриваемая система эквивалентна нулю, т.е. уравновешена.

Возможные случаев приведения произвольной пространственной системы сил
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1. M O R 0 |
R 0 |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
R 0 |
||||||
2. M O R = 0 |
|
||||||||||||||||||
|
|
|
|||||||||||||||||
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
R 0 |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
||||||||||||
3. M O R = 0 |
R = 0 |
||||||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||
4. M O R = 0 |
R = 0 |
||||||||||||||||||
M O 0 Общий случай, динамический винт.
M O 0 Равнодействующая.
M O = 0 Равнодействующая в центре приведения.
M O 0 Пара сил.
M O = 0 Система сил эквивалентна нулю.