

Статика и кинематика / Статика
.docxСТАТИКА
Основные понятия и определения статики
Абсолютно твердое тело – тело которое не деформируется
Материальная точка – тело, размерами которого можно пренебречь, но имеющее массу
Сила – мера мех воздействия
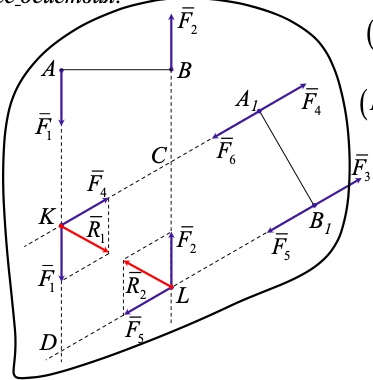
Распределенная сила – та, которая распределена по поверхности / объему [1.2, 1.3, 1.4, 1.5]
![]()
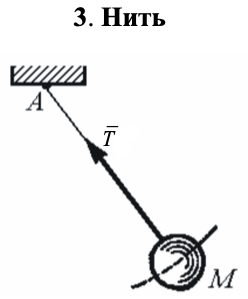
Сосредоточенная сила – приложена к одной точке [1.1]

Система сил – множество реакций и активных сил. Под их действием тело находится в покое / движении:
уравновешенная = 0 (эквивалентной) – тело не изм. своего движения / покоя
равнодействующая - система сил, которую можно заменить одной
плоской - расположена в одной плоскости
пространственной - НЕ --“--
Связь – тела взаимодействия с рассматриваемым телом. – то, что ограничивает свободу перемещения
Реакция - Сила, которая действует со стороны связи на рассматриваемое тело. – сила, с которой связь действует на тело. Это нужно чтобы отделить тело от тело взаимодействия, заменив все связи реакциями. Они возникают в отчет на активные силы
Активные силы – известные, заданные
Равновесие - состояние покоя / прямолинейного движения
Статика - раздел механики, изучающий условия равновесия тел
Аксиомы статики. Связи и их реакции. Аксиомы связей
Первая – на свободное тело две силы будут действовать эквивалентно, только если они равны (по модулю) и направлены вдоль одной прямой в противоположные стороны

Вторая – действие системы сил не измениться, если + или – эквивалентную систему
Следствие: действие силы не измениться при переносе силы вдоль линии действия

Третья – всякому действию есть равное противодействие
Четвертая – 2 силы приложенные к одной точке тела имеют равнодействующую в виде диагонали параллелограмма
Пятая – всякое тело можно рассматривать, как свободное, если заменить связи реакциями

Шестая – если тело находится под действием сил, то ничего не поменяется если оно отвердеет
Равновесие - состояние тела или системы тел, в котором оно не движется в данной системе отсчета
Теорема о 3-х уравновешенных силах
Если под действием 3-х сил тело находится в равновесии, и линии действия 2-х сил пересекаются, то все силы лежат в одной плоскости и их линии действия и пересекаются в одной точке
Система = одной силе (равнодействующей), которая приложена в точке пересечения и = геометрической сумме
Для равновесия системы сходящихся сил достаточно, чтобы равнодействующая = 0
Для равновесия пространственной системы достаточно, чтобы алгебраические суммы проекции всех сил = 0
Момент силы относительно точки
На плоскости
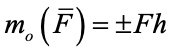
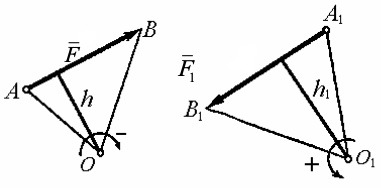
На плоскости: Момент = модулю силы * на кратчайшее расстояние до этой силы
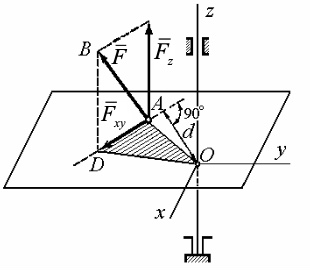
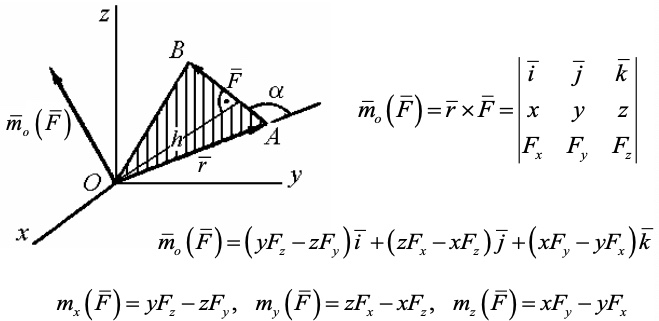
В пространстве: Момент = радиус-вектора точки приложения силы * вектор силы
Момент равнодействующей пространственной системы сходящихся сил = геометрической сумме моментов сил относительно этой точки
Момент силы относительно оси – момент проекции силы на плоскость, перпендикулярную к этой оси, относительно точки пересечения этой плоскости с осью. Момент оси = 0, если сила параллельна оси или пересекает её.
Аналитические выражения моментов силы относительно декартовых координат
Момент можно вычислить зная проекции и координату точки приложения
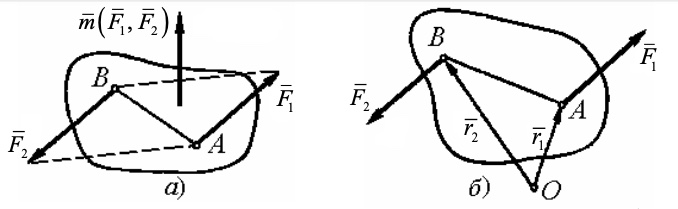
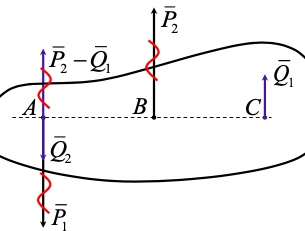
Сложение 2-х параллельных и антипараллельных сил
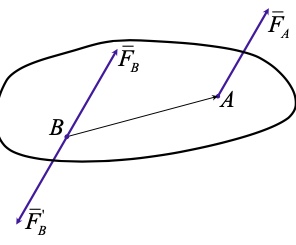
Пара сил – система 2-х антипараллельных и не лежащих на одной прямой сил
Момент пары = одна сила пары * плечо пары – это вектор перпендикулярный плоскости направленный в ту сторону откуда поворот тела будет виден против часовой стрелки.


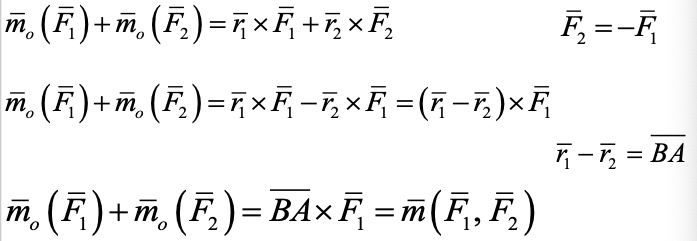
Сумма моментов пары относительно любого центра =
Теоремы об эквивалентности и сложении пар
Действие пары не изменит своего действия на тело, если его переместить в другое положение тела
Действие пары не изменит своего действия на тело, если его переместить в другую параллельную плоскость

Действие пары не измениться, если любым способом видоизменить модули и плечо, сохраняя их произведение (т.е. момент)
Система пар, эквивалентна одной паре, вектор-момент которой = геометрической сумме слагаемых

Момент результирующей пары по величине и направлению определяется диагональю параллелограмма, построенного на векторах-момента слагаемых пар (= геометрической сумме)
Для равновесия достаточно алгебраической суммы на каждую координатную ось.
Лемма о параллельном переносе силы
Всякая сила эквивалентна той же силе, приложенной в другой точке + пара сил + момент данной силы относительно новой точки
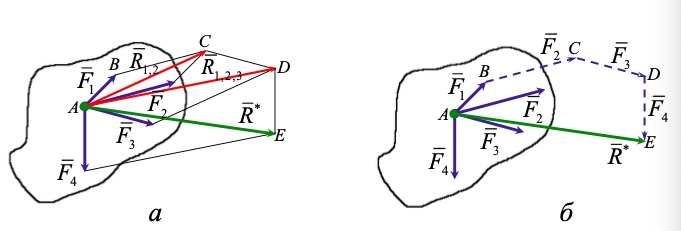
Приведение произвольной пространственной системы сил к главному вектору
Изменение главного момента при изменении центра приведения
Алгоритм решения задач на правило моментов (задач по статике):
Вариант 1
1. Сделать чертеж и выделить тело, равновесие которого надо рассмотреть в данной задаче.
2. Изобразить на чертеже активные силы.
3. Выбрать наиболее удобную систему координат. Отбросить связи и заменить их силами реакций.
4. Рассмотреть равновесие данного несвободного твердого тела как свободного, находящегося под действием активных сил и сил реакций. Для получившейся системы сил записать соответствующие условия равновесия.
5. Составить условие равновесия и решить получившуюся систему уравнений относительно искомых в задаче величин.
Вариант 2
Выбрать тело исследование равновесия которого позволит определить требуемой величины. Начертить расчётную схему – упрощенный рисунок, на которой вынесены лишь необходимые для решения линейные размеры углы, а несущественные детали опущены
Изобразить на схеме активные силы, данные в условии задачи
Если тело не свободна, отбросить наложенные на него механические связи, заменив их действий реакциями в соответствии с видами связи. После такой замены тело становится свободным
Проверить выполнение необходимого условия статической определённости задачи: число неизменных, появившихся в расчётной схеме, не должно превышать число уравнений равновесия для рассматриваемой системы силы
Если задача статически определимой то используя условия равновесия системы сил составить систему уравнений равновесия и решить её
Вариант 3
Нарисовать рисунок. Следует помнить, что сила тяжести, действующая на тело изображается один раз. Если же в задаче идет речь об изломанной палочке, то удобнее рисовать отдельно силы тяжести, действующие на каждую часть палочки, считая массы частей пропорциональными их длинам. В отличие от динамики, где силы изображаются из одной точки, в статике важно точно указать точку приложения силы.
Выбрать ось вращения в точке приложения самой ненужной в задаче силы или сил (той силы, которую определять не надо и не хочется из-за природного чувства лени). При этом плечо (и, следовательно, момент) этой силы обратится в нуль независимо от ее величины, и в дальнейших вычислениях эту силу можно не учитывать совсем.
Записать правило моментов относительно данной оси, на забывая про правило знаков.
При необходимости записать также условие согласно которому равнодействующая сила равна нолю.
Выразить искомую силу.
Приведение системы сил к простейшему виду
Вычисляем компоненты главного вектора, составляя проекции всех сил на оси координат
![]()
Находим модуль главного вектора

Вычисляем компоненты главного момента системы относительно начала координат

Находим модуль главного момента

Определяем скалярный инвариант системы (система имеет не меняющиеся при смене центра величины: главные вектор и скалярное произведение гл вектора на гл момент

Если I = 0, то система приводится к равнодействующей
Находим минимальный гл момент
![]()
Проверяем
неравенство![]() .
.
Если R = 0, то задача решена – система приводится к паре (или уравновешена, если и M0 = 0)
Вычисляем шаг винта

если р < 0, то гл вектор и гл момент направлены в винтовой оси и разн стороны
если р = 0, система приводится к равнодействующей
Если p > 0, то гл вектор и гл момент направлены в одну сторону
Записываем уравнение центральной винтовой оси

Находим координаты точки А пересечения центральной оси с плоскостью xy. Если прямая параллельная плоскости xy, то такой точки не существует. Решая ур п. [8] при z = 0, получаем y = ya, z = za . Аналогично находим пересечени с плоскостями xz, yz (если они существуют).
Проверяем решение приводя систему к любой точке центральной винтовой оси.
Решение задач
