

Статика и кинематика / Кинематика
.pdfЛевитский Д.Н. Харин О.Н. Кузнечиков А.С.
ЛЕКЦИИ ПО ТЕОРЕТИЧЕСКОЙ МЕХАНИКЕ
(Лекционная часть электронного учебно-методического комплекса по курсу теоретической механики)
КИНЕМАТИКА
Москва 2006 (редакция 2017 года)
1
Лекция 8
1.Предмет и задачи кинематики.
2.Способы задания движения точки.
3.Скорость точки при векторном способе задания движения.
4.Определение скорости точки при координатном способе задания движения.
5.Скорость точки при естественном способе задания движения.
2.1. Предмет и задачи кинематики
Кинематика изучает механическое движение тел без учета причин, вызывающих изменение этого движения.
Свойства пространства считаются не зависящими от движущейся в ней материи.
Время не связанно с движущейся материей.
Пространство и время - формы существования материи и являются объективной реальностью.
Относительность движения. Система отсчета.
Условно «неподвижная» система отсчета.
Основные задачи кинематики:
-изучение законов движения материальных точек или тел относительно выбранной системы координат; - определение кинематических характеристик их движения.
Под перемещением точки будем понимать ее переход из одного положения в пространстве в другое произвольным способом, но за определенный промежуток времени.
Зависимость между положениями движущейся точки в пространстве от времени называется законом ее движения
Кривая, описываемая точкой при ее движении, называется траекторией движения точки.
2.2. Способы задания движения точки
Движение точки в пространстве определяется тремя основными способами: векторным, координатным и естественным.
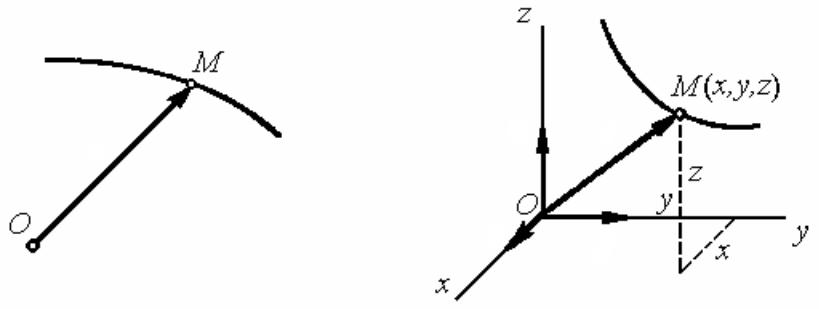
Векторный способ задания движения точки
r |
|
kr =r r (t) |
|
i |
j |
|
|
|

Координатный способ задания движения точки
x = x(t), |
y = y(t), |
z = z(t) |
r = x(t)i + y(t) j +z(t)k
x = x(t)
= (t), = (t)
z M(x, y, z)
|
|
|
|
|
• |
|
|
|
|
|
r |
z |
|
|
|
|
|
|
||
k |
|
|
|
|||
|
|
|
y |
|||
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
j |
||
|
|
|
|
|
|
|
x
x
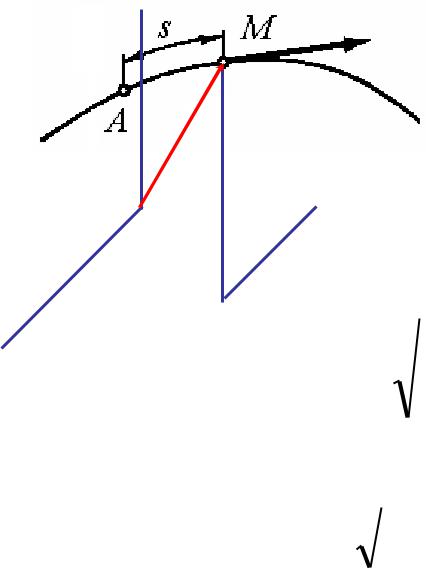
Естественный способ задания движения точки
z |
|
|
v |
||
|
r |
|
|
|
|
s = s(t) |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
||
|
z |
|
|
|
|
|
|
|
|
|
|
|
y |
|
2 |
|
2 |
|
2 |
|
|
2 |
|
|
(ds ) = (dx) |
+ (dy) |
+ (dz) |
||||||||
|
|
|
|
|
|
||||||
|
y |
|
|
|
|||||||
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
x |
|
|
(d x)2 |
+ (d y)2 + (d z)2 d t |
|
||||||
s = |
|
||||||||||
|
|
||||||||||
|
|
|
0 |
d t |
d t |
d t |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
s = |
x |
|
+ y |
+ z |
dt |
|
|
2 |
2 |
2 |
|
0
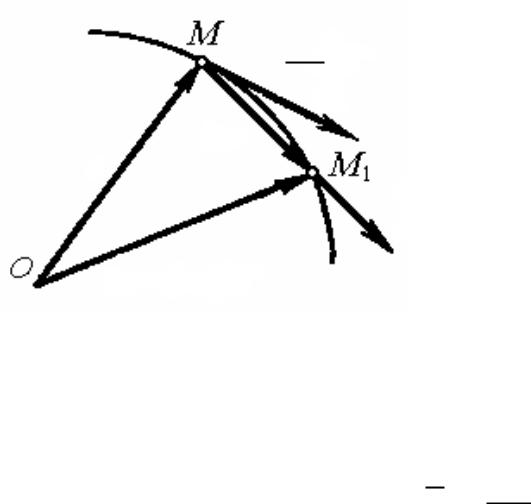
2.3. Скорость точки при векторном способе задания движения
dr
dt
r
r
r =r + r
1
Скорость точки
t1= t+ t |
|
|
r =r + r |
||||||
|
|
|
|
1 |
|
||||
t = t1 – t |
|
|
|
|
|
||||
M1M = r1 − r = r |
|||||||||
|
|
|
|
||||||
r |
|
|
|
|
|
|
|||
t |
r |
|
|
|
|
r |
|||
|
|
|
|
|
|
|
|||
v |
ср |
= |
v = lim |
t |
|||||
|
|
|
t |
|
|
|
t →0 |
||
в данный |
момент |
|
времени, есть |
||||||
векторная величина, равная первой производной от радиус-вектора точки по времени
v = ddtr
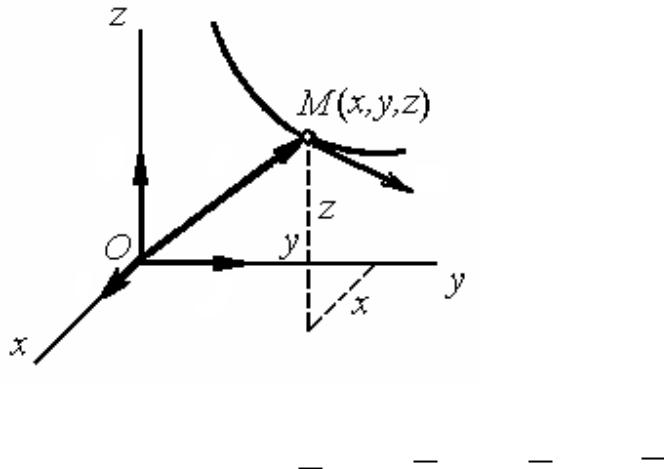
2.4. Определение скорости точки при координатном способе задания движения
x = x(t), y = y(t), z = z(t)
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
v |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
r = x(t)i + y(t) j +z(t)k |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
j |
|
|
|
dx |
|
|
dy |
|
|
|
|
|
dz |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
v |
= |
|
|
|
i + |
|
|
j + |
|
k |
||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
dt |
|
|
|
|
|
dt |
||||
v = vx i +v y j +vz k