

Статика и кинематика / Кинематика
.pdf
|
r |
|
|
|
r2 |
2 |
r1 |
r2 |
2 |
||||
1 |
|
1 |
|
|
|
|
|
|
|||||
|
|
|
|
ve |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|||||
|
v |
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
|
|
1 |
|
v |
|||
|
|
|
|
|
|
|
|
|
|
|
r |
||
|
|
|
|
|
|
|
|
|
|
|
|
||
ve
Точка Р (мгновенный центр скоростей) делит отрезок О1О2 внутренним или внешним образом на части, обратно пропорциональные модулям угловых скоростей.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
v |
|
= O P− O P =0 |
121 |
|||||
|
P |
1 1 2 2 |
|
|
||||

|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r1 = O1P + ; |
r2 = O2 P + ; |
||||||||
|
|
|
|
|
|
|
|
|||||
|
|
|
= 1 (O1P + ) |
+ 2 (O2 P + ). |
||||||||
v |
M |
|||||||||||
|
|
|
1 |
|
|
|
|
|
||||
vM = 1 O1P + 1 + 2 O2 P + 2 = = 1 + 2 = ( 1+ 2 ) .
vM = .= 1+ 2.
122
Совокупность двух вращений твердого тела вокруг параллельных осей, не образующих пару вращений, эквивалентна одному вращению вокруг мгновенной оси с угловой скоростью, равной векторной сумме угловых скоростей составляющих вращений.
Мгновенная ось делит расстояние между осями составляющих вращений (внутренним или внешним образом) на части, обратно пропорциональные модулям угловых скоростей, в зависимости от того, в одну или разные стороны направлены векторы этих скоростей.
123
Лекция 17
Различные случаи сложения
поступательного и вращательного
движений твердого тела. Винтовое движение.
124
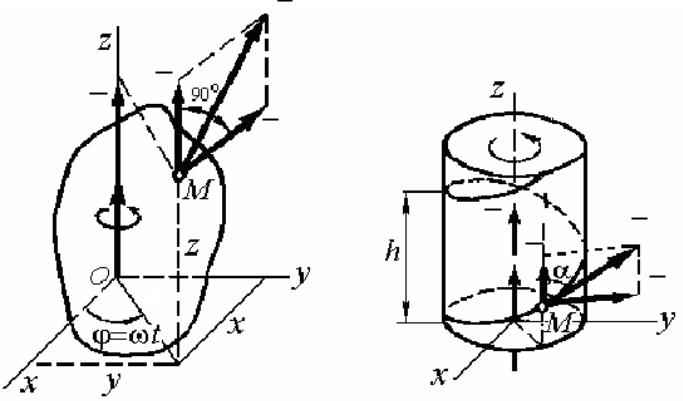
2.44. Сложение поступательного и вращательного движений твердого тела
1. Скорость поступательного движения скорости вращательного движения
vM
v
v
v1
v
r
параллельна угловой
v vM v1
|
|
|
|
|
|
|
|
|
|
v |
M =ve +vr =v + r |
125 |
|||||||

|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
v |
M |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
v |
M =ve +vr =v + r |
|||||||||||||
|
|
|
v |
|
|
|
|
|
|
|||||||||||||||||||||
v |
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
v1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
vr |
|
R |
||||
|
|
|
|
|
|
|
|
|
v |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
v |
M |
|
|
tg = |
= |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
v |
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ve |
|
v |
||||
|
|
r |
|
|
|
|
|
|
|
|
|
|
|
v1 |
|
|
|
|
|
|
||||||||||
h =vT , T = |
2 |
, |
|
|
|||
|
|
h = 2 v = 2 p
p = v
|
|
|
|
|
Если скорость и угловаяv скорость |
||||
переменны, то движение тела будет |
||||
мгновенно винтовым движением. |
|
|||
126

2. Скорость поступательного движения перпендикулярна угловой скорости вращательного движения
|
|
|
|
|
|
|
|
|
|
|
|
|
v |
= O1O3 |
|
||
|
|
|
|||
|
|
d = O O = |
v |
|
||
v |
|
|||||
1 |
3 |
|
||||
|
|
|||||
|
|
|
|
|||
−
Составное движение тела в случае, когда скорость поступательного движения перпендикулярна угловой скорости вращательного движения, эквивалентно вращению с той же угловой скоростью вокруг мгновенной оси, параллельной оси заданного вращения z и отстоящей от нее
на расстоянии |
d = |
v |
127 |
|
|
||
|
|
|

3. Скорость поступательного движения не перпендикулярна угловой скорости вращательного движения
|
|
|
d = O O = |
v2 |
|||
|
|
|
|
|
|||
|
|
|
|
|
|
||
|
|
|
|
|
1 |
3 |
|
|
|
|
|
|
|
|
|
|
|
v1 |
|
|
|
||
v |
|
|
|
||||
v1
v2
−
Совокупность поступательного и вращательного движений тела, в случае когда скорость v поступательного движения не перпендикулярна вектору угловой скорости эквивалентна мгновенно винтовому движению, кинематическому винту.

|
|
|
|
|
|
|
|
v1 |
|
||
|
|
||||
v |
|
||||
v1
v2
−
Кинематическим винтом называется совокупность движения тела с угловой скоростью вокруг мгновенной оси О3z3 и мгновенно поступательного движения вдоль той же оси со скоростью, равной проекции скорости v на направление вектора . Ось О3z3 называется мгновенной винтовой осью.
129