

Статика и кинематика / Статика
.pdf1.5. Условия равновесия системы сходящихся сил
Для равновесия системы сходящихся сил необходимо и достаточно, чтобы равнодействующая этой системы сил равнялась нулю.
N
R* = Fk = 0
k =1
Силовой многоугольник, построенный на векторах слагаемых сил данной системы, замкнут (геометрическое условие равновесия).
Для равновесия пространственной системы сходящихся сил необходимо и достаточно, чтобы алгебраические суммы проекций всех сил на каждую из трех выбранных любым образом координатных осей равнялись нулю.
N |
N |
N |
Fkx = 0, |
Fky = 0, |
Fkz = 0. |
k =1 |
k =1 |
k =1 |
Для равновесия плоской системы сходящихся сил:
N |
N |
Fkx = 0, |
Fky = 0. |
k =1 |
k =1 |
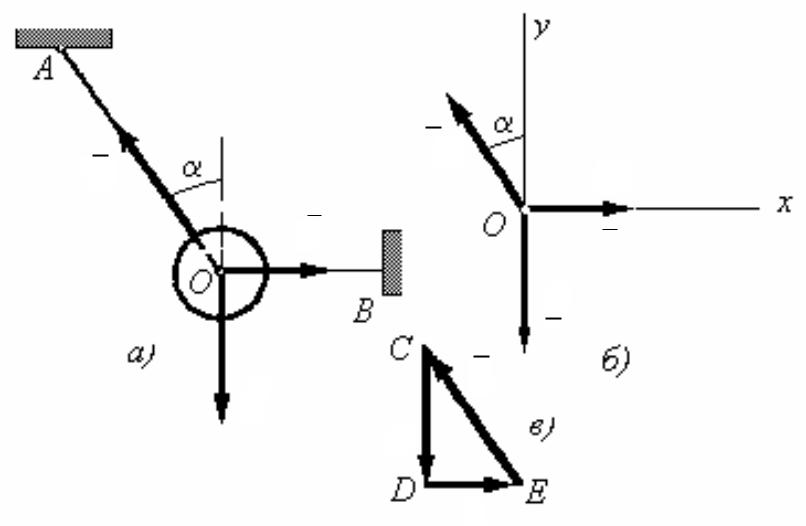
Пример:
T1
T1
T2
P
T1
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P |
|
|
|
|
|
||
|
P |
|
P |
|||||||
|
|
|
|
|
||||||
T = |
|
, T = Ptg |
|
|
|
|
|
|||
|
|
|
|
|
|
|
||||
1 |
cos |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
T2 |
||||
|
|
|
|
|
|
|
|
|||
N
Fkx = T2 −T1 sin = 0
k =1
N
Fky = T1 cos − P = 0
k =1
T2
Лекция 2
1.Момент силы относительно точки.
2.Момент силы относительно оси.
3.Зависимость между моментом силы относительно оси и моментом силы относительно любой точки,
лежащей на этой оси.
4.Аналитические выражения моментов силы относительно координатных осей. Пример.

1.6. Момент силы относительно точки
На плоскости
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
mo (F |
) = Fh |
||||
F |
|
|
|
|
|
|||||||
|
|
|
|
|
||||||||
|
|
F1 |
||||||||||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
o (F |
) |
= 2пл OAB |
|||
|
|
m |
||||||||||
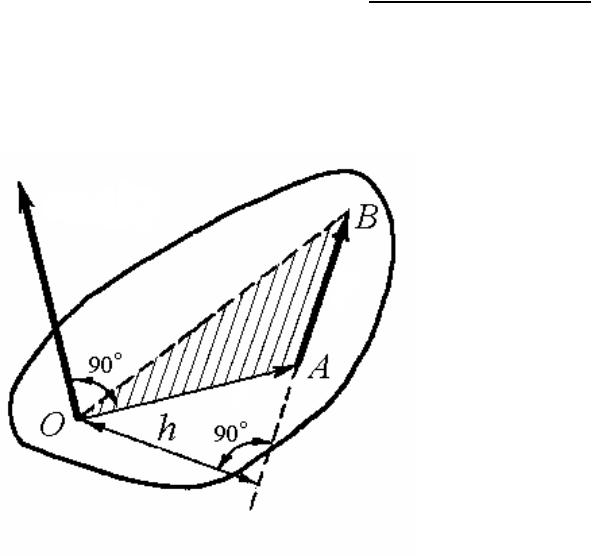
Моментом силы относительно точки называется алгебраическая
величина, равная произведению модуля силы на кратчайшее расстояние от точки до линии действия силы.
В пространстве:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
o (F |
) |
|
|
|
|
|
|
|
|
|
|
|
|
|
m |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
o |
(F |
) = r F |
|
||||
|
|
|
|
|
|
|
m |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F |
момент |
силы |
относительно |
||||||||
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
некоторого |
|
|
|
центра |
равен |
||||
|
|
|
|
|
|
|
векторному произведению радиус- |
|||||||||
|
|
|
|
r |
|
|
вектора точки |
приложения |
силы |
|||||||
|
|
|
|
|
|
|
||||||||||
на вектор силы.
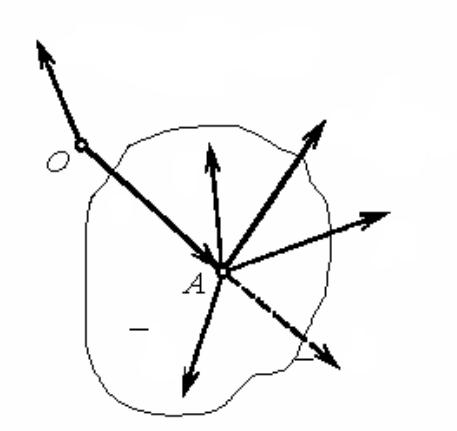
Пространственная система сходящихся сил:
|
|
|
|
|
|
N |
N |
N |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
O (Fk ) = r Fk = r Fk |
|||||||||||||||||||||||||||||||||
m |
||||||||||||||||||||||||||||||||||
|
|
|
|
|
k =1 |
k =1 |
k =1 |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
N |
|
|
||
|
|
o ( |
|
* ) |
|
|
|
|
|
|
Равнодействующая |
|
R |
* = Fk |
||||||||||||||||||||
|
|
R |
|
|||||||||||||||||||||||||||||||
m |
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k =1 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
N |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
R |
* = Fk |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k =1 |
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
F1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
r |
|
|
|
|
|
|
|
|
|
|
|
|
N |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
o (R* ) = |
|
o (Fk ) |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m |
m |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
F2 |
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k =1 |
||||||||
FN
Fk

N
mo (R* ) = mo (Fk )
k =1
Момент равнодействующей пространственной системы сходящихся сил относительно произвольной точки равен геометрический сумме моментов сил данной системы относительно той же точки.
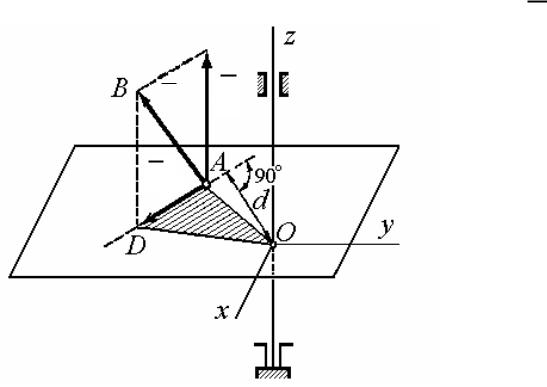
1.7 Момент силы относительно оси
F
Fxy
mz (F ) = Fxy d = 2пл OAD
Fz
Момент силы относительно оси равен нулю, если сила параллельна оси или пересекает ее.
Моментом силы относительно оси называется алгебраическая величина момента проекции этой силы на плоскость, перпендикулярную к данной оси, относительно
точки пересечения этой плоскости с осью.
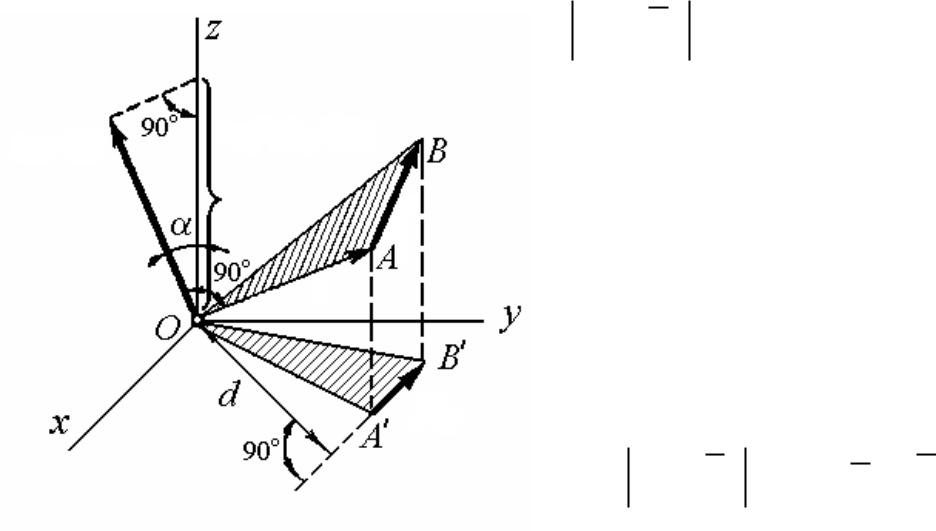
1.8 Зависимость между моментом силы относительно оси и моментом силы относительно любой точки, лежащей на этой оси
mo (F ) = 2пл OAB
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
прz |
|
o (F |
) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
m |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
mz (F ) |
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= 2пл OA B |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
o (F |
) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
F |
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
пл OA B |
=пл OA B cos |
|||||||||||
|
|
|
|
|
|
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
) |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
mz (F |
= |
mo (F |
) |
cos , |
|||||||
|
|
|
|
|
|
|
|
|
|
Fxy |
||||||||||||||||
или mz (F ) = прz mo (F )