

Статика и кинематика / Статика
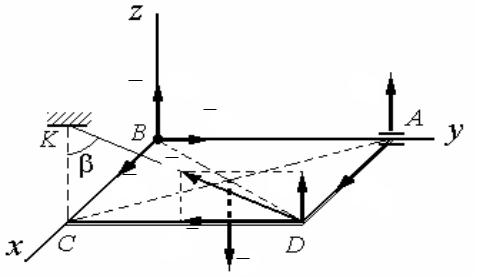
.pdfПример 1.5. Однородная прямоугольная полка АВСD весом Р укреплена в точке А цилиндрическим, а в точке В сферическим шарнирами и удерживается горизонтально нитью DК, лежащей в вертикальной плоскости, проходящей через DC и образующей с вертикалью угол . Найти реакции шарниров и нити.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Z A |
||
|
Z B |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
YB |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Tz |
X A |
||||||||
|
|
|
|
|
|||||||||||
X B |
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||
Ty
P
Обозначив АВ = a, AD = b, составим следующие шесть условий равновесия:
Z B
YB
T
X B
Ty
P
|
|
|
|
|
|
|
|
|
|
|
N |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Fkx = 0, X A + X B = 0. |
|||||
|
|
|
|
Z A |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
k =1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
N |
|
|
|
|
|
Tz X A |
|
|
|
|
|
Fky = 0, YB −Tsin = 0. |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
k =1 |
|
|
|
|
|
|
|
N |
|
|
|
|
|
|
|
|
|
|
|
|||
|
Fkz |
|
= 0. − P + Z A + ZB + Tcos = 0. |
|||||||||||||
|
k =1 |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
N |
|
|
|
|
|
|
|
|
|
a |
|
|||
|
mx |
|
|
|
|
|
Z Aa +Tcos a − P |
= 0. |
||||||||
|
(Fk ) = 0, |
|||||||||||||||
|
|
|||||||||||||||
|
k =1 |
|
|
|
|
|
|
2 |
|
|||||||
|
|
N |
|
|
|
|
|
|
|
b |
|
|
|
|||
|
my |
|
|
|
|
|
−Tcos b + P |
= 0. |
||||||||
|
(Fk ) = 0, |
|||||||||||||||
|
|
|||||||||||||||
|
k =1 |
|
|
|
|
|
|
2 |
|
|
|
|||||
|
|
N |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
− X Aa −Tsin b = 0. |
||||||||||||
|
mz (Fk ) = 0. |
|||||||||||||||
k =1
Решая полученную таким образом систему шести уравнений с шестью неизвестными, найдем искомые реакции:
X |
|
= −X |
|
= −P |
b |
tg , Y = |
P |
tg , Z |
|
= 0, Z |
|
= − |
P |
. |
A |
B |
|
|
A |
B |
|
||||||||
|
|
|
2a |
B |
2 |
|
|
2 |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
||||
Лекция 7
1.Центр параллельных сил.
2.Центр тяжести системы материальных точек.
3.Центр тяжести неоднородного тела.
4.Определение координат центра тяжести однородных тел
(центр тяжести объема, площади, линии).
5.Примеры определения координат центра тяжести однородных тел простейшей формы.
6.Трение скольжения и качения.
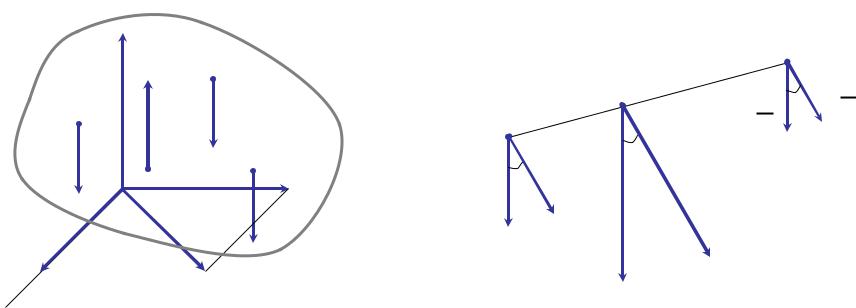
1.25 Центр параллельных сил
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
Ak |
|
|
|
|
|
|
|
|
|
|
|
|
C1 |
|
|
|
|
|
|
|||||||||||
|
|
F2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Fk |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
A2 |
AN |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
F1 |
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
' |
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F1 |
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
FN |
|
M y |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
F |
|
|
|
|
|
|
' |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
||||||||||||||||
M x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
MO |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F1 |
|
|
F2 |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
N |
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
R |
= Fk 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
A C |
1 |
A C |
1 |
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k =1 |
|
|
|
|
|
|
|
|
|
|
2 |
|
|
1 |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
которую проходит линия |
|
|||||||||||||||||||||||
Точка С, через |
|
|||||||||||||||||||||||||||||||||||||||
A2
F2 F2 '
действия
равнодействующей системы параллельных сил, такая, что при любых поворотах этих сил около фиксированных их точек приложения в одну и ту же сторону и на один и тот же угол, называется центром параллельных сил.
|
z |
|
* |
Fk |
|
|
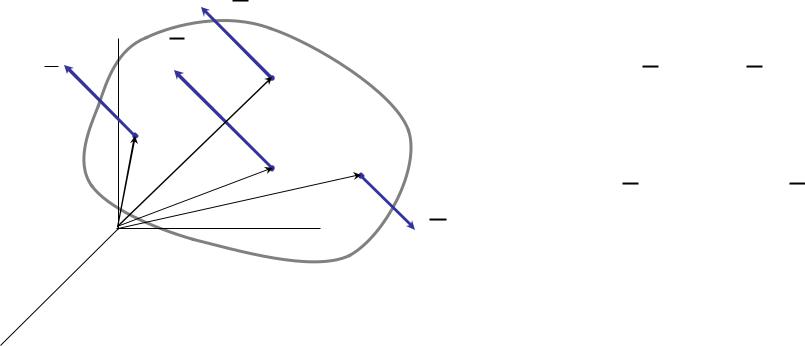
Равнодействующая |
|
|
R |
|
|
|
|
N |
||
|
|
|
|
Ak |
|
|
||
F1 |
A |
|
|
|
|
|
R* = Fk |
|
|
rk |
rC |
C |
AN |
|
k =1 |
||
|
r1 |
|
N |
|||||
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
rN y |
|
rC R* = (rk Fk ) |
|
|
|
|
|
|
|
|
FN |
k =1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
N |
N |
x |
|
|
|
|
|
|
rC Fk e = (rk Fk e ) |
|
|
|
|
|
|
|
k =1 |
k =1 |
|
|
|
|
|
|
|
|
||
|
N |
N |
|
|
rC Fk − rk Fk |
e = 0 |
|||
|
k =1 |
k =1 |
|
|
|
|
|
N |
|
|
|
rk Fk |
Радиус-вектор центра параллельных сил |
rC |
= |
k =1 |
N |
|||
|
|
|
Fk |
|
|
|
k =1 |
Формулы для координат центра системы параллельных сил:
|
N |
|
N |
|
N |
|
|
xk Fk |
|
yk Fk |
|
zk Fk |
|
x = |
k =1 |
, y = |
k =1 |
, z = |
k =1 |
. |
N |
N |
|
||||
C |
C |
C |
N |
|||
|
Fk |
|
Fk |
|
Fk |
|
|
k =1 |
|
k =1 |
|
k =1 |
|

1.26 Центр тяжести системы материальных точек
Центр С системы параллельных сил тяжести, приложенных к точкам материальной системы, называется центром тяжести рассматриваемой системы материальных точек.
рk (k = 1, 2,… N) -
N
xk pk
xC = k =1N
pk
k =1
вес каждой точки системы.
|
N |
|
N |
|
|
|
yk pk |
|
zk pk |
|
|
, y = |
k =1 |
, z = |
k =1 |
. |
|
N |
N |
||||
C |
C |
|
|||
|
pk |
|
pk |
|
|
|
k =1 |
|
k =1 |
|
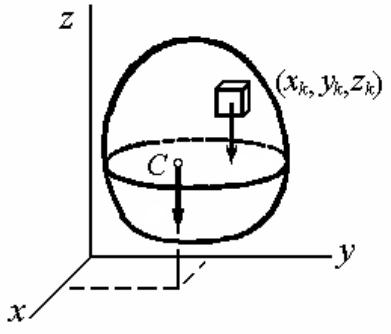
1.27 Центр тяжести неоднородного тела
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
N |
|
|
|
|
|
|
|
|
|
|
N |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
xk pk |
|
|
|
yk pk |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
k =1 |
|
|
|
, |
|
|
|
y |
k =1 |
|
, |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
P |
|
|
|
|
|
|
C |
|
|
P |
|
|
|
|
|
|
|
C |
P |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
N |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
zk pk |
|
|
|
||||
|
|
P |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
|
|
k =1 |
|
|
. |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
C |
|
|
|
|
|
|
P |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
N |
|
|
|
|
|
|
|
|
N |
|
|
|
|
|
|
|
|
|
|
N |
|
|
|
||||
|
lim xk pk |
|
|
lim yk pk |
|
|
|
|
|
|
|
lim zk pk |
|
|
|||||||||||||||
x = |
N → k =1 |
|
|
|
, |
y = |
N → k =1 |
|
|
, z = |
N → k =1 |
|
. |
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
C |
|
P |
|
|
|
|
C |
|
|
P |
|
|
|
|
C |
|
|
P |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
P |
|
|
|
|
|
|
|
P |
|
|
|
|
|
|
|
P |
|
|
|
|
|
|
|
|||
|
x = |
1 |
|
|
xdp, |
y = |
1 |
|
ydp, |
z |
= |
1 |
|
|
zdp. |
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
C |
|
|
|
|
|
|
|
|
C |
|
|
|
|
|
C |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
( V ) |
|
|
|
|
|
|
( V ) |
|
|
|
|
|
|
|
|
( V ) |
|
|
|
||||

1.28. Определение координат центра тяжести однородных тел
Центр тяжести объема
dp= dV, P= V.
xC =V1 ( V ) xdV , yC =V1 ( V ) ydV , zC =V1 ( V ) zdV .