

Статика и кинематика / Статика
.pdfz
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
m |
|
|
|
|
|
|
F |
' |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
||||
|
|
|
N |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
m |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
F2' |
|
|
|
|
y |
||||||||||||
|
|
|
|
|
|
|
|
O |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
F |
' |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
N |
|
|
|
|
|
||||||||||
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
N |
|
|
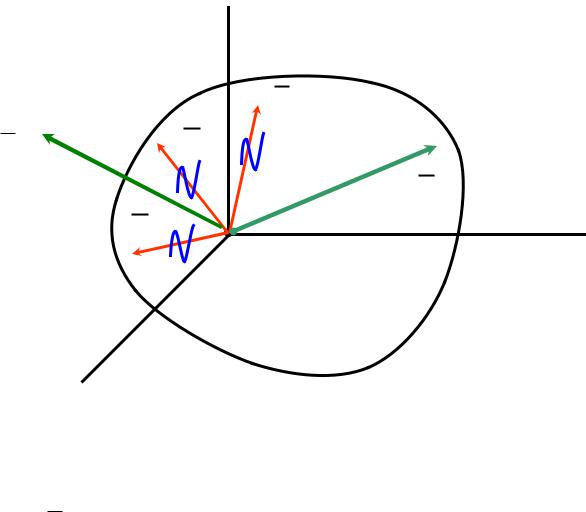
R = F1 + F2 +... + FN |
|
= Fk |
|||||||||||||||||||||||||
k =1
Сила R , равная геометрической сумме всех сил данной системы, называется главным вектором.
z
m1
MO m2
|
R |
mN |
y |
O |
x
|
|
N |
|
|
|
N |
|
|
M |
O = |
|
o (Fk ) = (rk Fk ) |
|||||
m |
||||||||
|
|
k =1 |
|
|
|
k =1 |
||
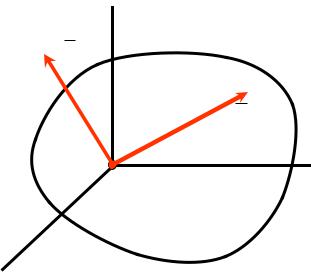
Величина MO , равная геометрической сумме моментов всех сил системы относительно центра приведения, называется главным моментом относительно этого центра.
z
MO
R
O
y
x
Произвольная пространственная система сил, действующих на абсолютно твердое тело, в общем случае эквивалентна одной силе, равной главному вектору этой системы и приложенной в произвольно выбранном центре приведения О, и главному моменту относительно этого центра приведения.
1.15.Формулы для определения главного вектора
иглавного момента
(F1, F2 , ... FN ) (R, MO )
N
R = Fk
k =1
N
M O = rk Fk
k =1
|
|
|
N |
|
|
|
|
|
R |
= Fk |
|
||
|
|
|
k =1 |
|
||
N |
|
|
N |
N |
||
Rx = Fkx , |
Ry = Fky , |
Rz = Fkz |
||||
k =1 |
|
|
k =1 |
k =1 |
||
N |
N |
N |
R = ( Fkx )2 + ( Fky )2 +( Fkz )2 |
||
k =1 |
k =1 |
k =1 |
|
|
) = |
Rx |
|
|
|
|
|
Ry |
|
|
, |
|
) = |
Rz |
|||
|
|
, |
|
|
|
, |
|
) = |
cos( |
R |
k |
|||||||
cos( |
R |
i |
cos( |
R |
j |
|||||||||||||
R |
R |
R |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
N
M O = rk Fk
k =1
N |
N |
N |
||||||
|
|
|
|
|
|
|
|
|
M x = mx (F |
k ) |
M y = my (F |
k ) |
M z = mz (Fk ) |
||||
k =1 |
k =1 |
k =1 |
||||||
N |
|
N |
N |
|
|
|
k ))2 + ( my (F |
k ))2 + ( mz (F |
k ))2 |
MO = ( mx (F |
||||
k =1 |
|
k =1 |
k =1 |
|
|
|
O , |
|
) = |
M x |
|
|
|
|
, |
|
|
M y |
|
|
O , |
|
) = |
M z |
|
cos(M |
i |
|
|
|
|
|
) = |
cos(M |
k |
|||||||||||
cos(M |
O |
j |
||||||||||||||||||
M |
|
M |
||||||||||||||||||
M |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
1.16. Изменение главного момента при изменении центра приведения
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(F1, F2 , ... FN ) |
|
(R, MO ) |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
A2 |
|
|
F2 |
|
|
|
|||||||||||||||||||||||
|
|
|
MO |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
F |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
Ak |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
N |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R = Fk |
||||||||||||||
|
|
|
A |
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
1 |
|
|
|
|
rk |
|
Fk |
|
|
|
|
|
|
|
|
|
|
|
|
k =1 |
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
O |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
N |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
AN |
|
|
M |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
O1 |
|
|
M O |
= rk |
Fk |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
O1 |
|
|
|
|
|
|
|
|
|
|
|
k =1 |
|
|
|
|
|
|
|
|
||||||||
|
|
|
FN |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
N |
|
|
|
|
|
|
|
|
|
|
|
|
M O1 |
= k Fk |
|
|
|
|
|
N |
||||||||
|
|
|
|
|
|
|
= ( |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
O1O |
||||
|
|
|
k =1 |
|
|
MO1 |
+ rk ) Fk |
||||||||
|
|
|
|
|
|
|
|
|
|
|
k =1 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
k |
= O1O + rk |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
N |
|
|
|
|
|
|
|
|
N |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
MO1 |
|
= rk Fk + O1O Fk |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
k =1 |
|
|
|
|
|
|
|
|
k =1 |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
O1 ( |
|
O ) |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
MO |
= MO +O1O R |
|
|
|
|
|
|
|
|
O1O |
R |
R |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
m |
||||||||||||||||||||||||||
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ |
|
O ( |
|
O ) |
||||||||||||||||
|
|
|
|
|
|
|
|
|
MO = MO |
R |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
m |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
1 |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
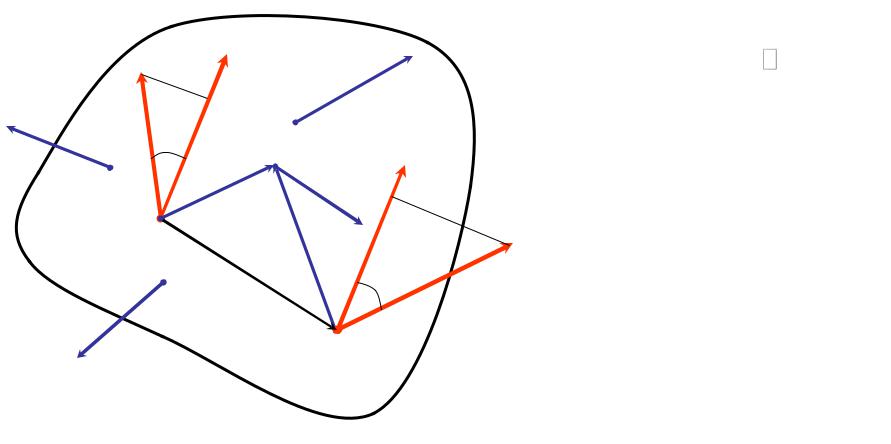
Главный момент системы сил относительно нового центра приведения О1 равен сумме главного момента относительно старого центра приведения О и момента главного вектора относительно нового центра в предположении, что он приложен в старом центре О.
Следствие 1. Если главный вектор данной системы сил равен нулю, то главный момент не зависит от выбора центра приведения.
Следствие 2. Если главный вектор равен нулю и существует точка, относительно которой главный момент равен нулю, то главный момент будет равен нулю относительно любого другого центра приведения.
Следствие 3. Главный момент данной системы сил одинаков для всех точек прямой, параллельной главному вектору.
1.17. Инварианты произвольной пространственной
|
|
|
|
|
|
|
|
|
|
|
|
|
системы сил |
|
|
|
|
|
||||
|
|
|
R |
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M |
|
|
|
|
|
|
|
|
|
|
|
|
N |
|
|
|
|
N |
||||
|
|
O M |
O* |
|
|
|
|
|
R |
= Fk |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
M |
O = rk Fk |
||||||||||||||
R |
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
k =1 |
|
|
k =1 |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
O |
|
|
|
M O* |
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M |
O1 |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
O1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
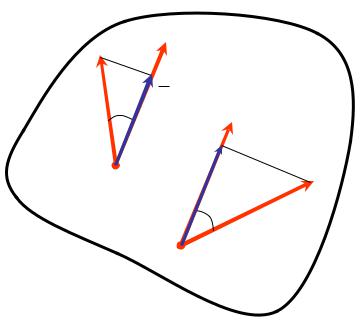
Первый инвариант
Величина и направление главного вектора по определению не зависят от выбора центра приведения.
I1 = Rx2 + Ry2 + Rz2