


ДО ЗМІСТУ ПІДРУЧНИКА
V.ОСНОВИ ДИНАМІКИ І СТІЙКОСТІ СПОРУД
14.Основні положення динаміки споруд
15.Коливання систем з одним ступнем вільності
16.Системи з кількома ступнями вільності
17.Коливання систем із нескінченно великим числом ступнів вільності
18.Метод скінченних елементів у задачах динаміки
19.Стійкість споруд
Динаміка споруд це розділ будівельної механіки, присвячений методам розрахунку споруд на дію динамічного навантаження. Динамічними називають навантаження, які змінюють свою величину, розташування або напрям в порівняно невеликий відрізок часу. Внаслідок дії таких навантажень маси елементів споруди, а також маса розташованого на споруді обладнання дістають прискорення. Це приводить до того, що на споруду з боку мас системи діють додаткові сили сили інерції, що істотно впливає на напружено-деформований стан споруди.
Розрахунок споруд з урахуванням сил інерції називається динамічним розрахунком. Його мета визначення закону руху мас системи в часі, на підставі якого можна дати оцінку міцності і жорсткості системи.
При динамічному впливі внаслідок наявності в системі пружних та інерційних сил збуджується коливальний рух. Зумовлені цим рухом поля напружень, деформацій і переміщень змінюються з часом. Таким чином, у динамічний розрахунок на відміну від статичного вводиться ще один суттєвий параметр час.
Усі будівельні споруди та їх елементи повинні відповідати не тільки умовам міцності, а й умовам стійкості. Це означає, що виведена якимись причинами з початкового стану рівноваги система повертається до нього після усунення цих причин. Метою розрахунку споруд на стійкість першого роду є визначення критичних величин навантаження, за яких система втрачає стійкість, тобто переходить до нового, якісно відмінного від первісного, деформованого стану.
ДО ЗМІСТУ ПІДРУЧНИКА
14. Основні положення динаміки споруд
З м і с т г л а в и
14.1.Динамічні навантаження
14.2.Методи динаміки споруд
14.3. Динамічні ступні вільності
14.4. Види коливальних процесів
14.5. Мета динамічного розрахунку
Динаміка споруд − це розділ будівельної механіки, присвячений методам розрахунку споруд на дію динамічного навантаження. Динамічними називають навантаження, які змінюють свою величину, розташування або напрям протягом порівняно невеликого відрізку часу. Внаслідок дії таких навантажень маси елементів споруди, а також маса розташованого на споруді обладнання дістають прискорення. Це призводить до того, що на споруду з боку мас системи діють додаткові сили − сили інерції, що істотно впливає на напружено-деформований стан споруди. Якщо інерційні сили, порівняно з навантаженнями, надто малі і ними можна знехтувати, зовнішні впливи вважають статичними
Розрахунок споруд з урахуванням сил інерції називається динамічним розрахунком. Його мета − визначення закону руху мас системи в часі, на підставі якого можна дати оцінку міцності і жорсткості системи.
При динамічному впливі внаслідок наявності в системі пружних та інерційних сил збуджується коливальний рух. Зумовлені цим рухом поля напружень, деформацій і переміщень змінюються з часом. Таким чином, у динамічний розрахунок на відміну від статичного вводиться ще один суттєвий параметр − час.

14.Основні положення динаміки споруд |
2 |
14.1.Динамічні навантаження
Динамічні впливи поділяються на два класи: силові, при яких на елементи споруди діє зовнішнє навантаження, що змінюється у часі, і кінематичні, коли здійснюються вимушені зміщення окремих елементів споруди. Динамічні впливи мають різноманітну природу, проте їх можна розподілити на деякі характерні види.
Нерухоме періодичне навантаження характеризується тим, що багаторазово повторюється через певні проміжки часу T, які називаються періодами (рис.14.1,а). Якщо періодичне навантаження змінюється за законом синуса (рис.14.1,б) або косинуса (рис.14.1,в), таке наван-
таження називають вібраційним або гармонічним.
Рис.14.1
Вібраційні навантаження виникають під час роботи промислового обладнання як наслідок неврівноваженості елементів, що обертаються. Дійсно, при обертанні маси m з постійною кутовою
швидкістю θ і з радіусом ρ виникає відцентрова сила P0 = mθ2ρ . Вертикальна і горизонтальна
складові цієї сили, які зображені на рис.14.1,г, відповідно дорівнюють:
Px = P0 cos θt, Py = P0 sin θt .
Вібраційне навантаження має дві властивості, які роблять його особливо небезпечним:
1)ефект дії вібраційного навантаження відчувається не тільки в місці прикладання, а й у віддалених від навантаження місцях;
2)немає прямої залежності між величиною навантаження і ефектом, який воно зумовлює.
Короткочасне навантаження (імпульси) характеризується швидким наростанням інтенсив-
ності від нуля до максимального значення та подальшим швидким зменшенням до нуля, тобто майже миттєвою дією (рис.14.1,д). Таке навантаження генерується при вибухах.
Узагальненням цієї моделі навантаження є послідовність імпульсів. Цей вплив може мати періодичний характер, коли імпульси виникають через рівні проміжки часу і мають однакову фор-
му.
14.Основні положення динаміки споруд |
3 |
Ударне навантаження супроводжується різкою зміною швидкості тіла, на яке діє навантаження, за короткий проміжок часу.
Рухоме навантаження характерне зміною розташування на споруді. Воно зумовлюється транспортними засобами, які переміщуються по мостових конструкціях.
Сейсмічне навантаження − це хаотичний рух ґрунту при землетрусі.
14.2.Методи динаміки споруд
За допомогою методів динаміки виводяться рівняння руху споруд. Розрізняють три методи виведення цих рівнянь: статичний, кінематичний і енергетичний.
Статичний метод ґрунтується на принципі Даламбера, згідно з яким до рухомої системи можна застосувати рівняння рівноваги, якщо до числа діючих навантажень додати сили інерції.
Тоді рівняння статики для плоскої системи можуть бути записані у вигляді
∑Fx − m |
d 2 x |
∑Fy − m |
d 2 y |
∑M z − I z |
d 2ϑ |
|
||||
|
= 0; |
|
= 0; |
|
= 0. |
(14.1) |
||||
dt2 |
dt2 |
dt 2 |
||||||||
Наведені рівняння називають |
рівняннями динамічної |
рівноваги. В них позначено: |
||||||||
∑Fx , ∑Fy − проекції |
зовнішніх сил на відповідні осі, |
∑M z − момент зовнішніх сил |
||||||||
стосовно координатної осі |
z; m − маса тіла. Момент інерції мас визначається співвідношенням |
|||||||||
I z = ∫ r 2dm , де r − плечі елементів мас dm стосовно осі z. |
|
|
|
|
|
|||||
Кінематичний метод ґрунтується на принципі можливих переміщень, відповідно до якого повна робота всіх сил на нескінченно малих переміщеннях системи, що перебуває у стані рівноваги під дією зовнішніх навантажень і сил інерції, дорівнює нулю.
Енергетичний метод базується на законі збереження енергії, згідно з яким сума кінетичної і потенціальної енергії в процесі коливань не змінюється:
|
K + U = const, |
|
|
|
(14.2) |
|
де К − кінетична, а U − потенціальна енергія. |
|
|
|
|
||
При поступальних переміщеннях кінетична енергія може бути записана у вигляді |
|
|||||
K = ∑ |
mivi2 |
+ ∑∫m(x)dx |
v2 (x) |
, |
(14.3) |
|
|
|
|||||
2 |
|
2 |
|
|
||
де vi , v( x ) − швидкість руху зосереджених маси mi |
і розподілених мас m( x ) |
системи. В |
||||
даному співвідношенні перша сума належить до зосереджених, а друга − до розподілених мас системи.
14.Основні положення динаміки споруд |
4 |
Потенціальна енергія системи може бути виражена через роботу зовнішніх сил:
A = |
1 |
∑Pi i cos(Pi , |
i ) + |
1 |
∑∫dP cos(dP, ) |
(14.4) |
|
|
|||||
2 |
|
2 |
|
|
||
або через роботу внутрішніх сил, яка в разі плоских систем матиме вигляд
|
1 |
M 2dx |
|
∑ ∫ |
N 2dx |
|
∑∫ |
|
Q2dx |
|
||
U = |
2 |
∑∫ |
EI |
+ |
EA |
+ |
η |
GA |
|
|||
|
|
|
|
|
|
|
. |
(14.5) |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
14.3. Динамічні ступні вільності
При виконанні динамічних розрахунків реальні споруди замінюються розрахунковими схемами. З точки зору теорії коливань розрахункові схеми, з якими оперує динаміка споруд,
являють собою механічний осцилятор або механічну коливальну систему.
Із коливальною системою пов’язана сукупність зосереджених або розподілених мас, рухливість яких під час коливань зумовлена деформаціями конструкцій. До основних параметрів, від яких залежить динамічна поведінка коливальної системи, можуть бути віднесені величини мас, які визначають інерційні властивості системи, і жорсткість елементів, яка характеризує пружні влас-
тивості системи.
Однією з найголовніших характеристик коливальних систем є число динамічних ступнів вільності, тобто мінімальна кількість незалежних геометричних параметрів (узагальнених координат), які визначають положення всіх мас системи при її деформаціях.
Положення будь-якої зосередженої маси на площині визначається трьома можливими переміщеннями: двома поступальними і одним кутовим. Отже, така маса має три ступні вільності.
Якщо цю масу умовно представити зосередженою у точці (точкова маса), то її положення на площині буде визначено лише двома поступальними переміщеннями. Тому можна вважати, що точкова маса на площині має два ступня вільності. Відповідно, в просторі зосереджена маса має шість ступнів вільності (три поступальних і три кутових переміщення), а точкова − три ступні вільності (три поступальні переміщення).
Розподілена маса може розглядатись як нескінченно велика кількість нескінченно малих мас і,
отже, має нескінченно велику кількість ступнів вільності.
В окремих випадках можливість переміщень деяких мас може бути обмежена в’язями системи,
внаслідок чого кількість ступнів вільності зменшується. Число ступнів вільності зменшується і в тому разі, якщо деякі переміщення мас мають вельми незначну величину, якою в процесі розрахунку можна знехтувати. Так, можна нехтувати власною розподіленою масою пружних

14.Основні положення динаміки споруд |
5 |
елементів, якщо її величина є набагато меншою величини мас, які на них розташовані. В такому разі елемент називають невагомим, або безмасовим.
При визначенні числа ступнів вільності динамічної системи зручно кожну зосереджену масу умовно закріплювати кінематичними в’язями так, щоб маса при обраних передумовах розрахунку виявилась нерухомою. Мінімальне число кінематичних в’язей, які необхідно ввести в системи для повного закріплення всіх її мас, характеризує число динамічних ступнів вільності коливальної си-
стеми.
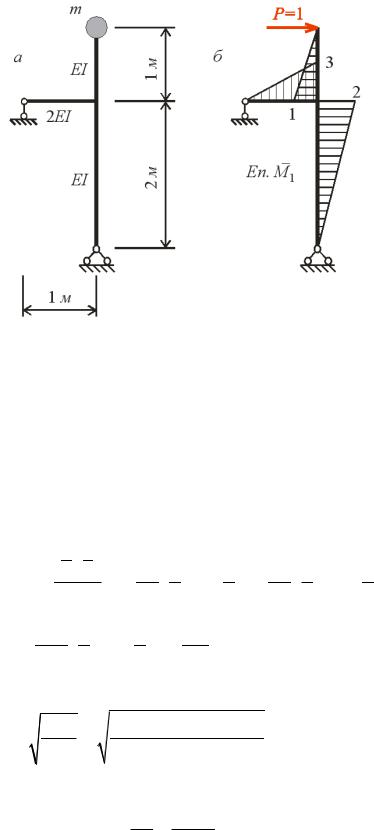
Розглянемо плоску невагому раму, на якій розташовані три зосереджені маси (рис.14.2,а).
Рис.14.2
Кожна зосереджена маса має три ступні вільності. Втім переміщенню маси m3 в напрямі осі y
перешкоджає ідеальна опорна в’язь. Отже, система. що розглядається має вісім ступнів вільності.
Якщо в процесі розрахунку виявляється за можливе знехтувати поздовжніми деформаціями стержнів, то горизонтальні переміщення всіх трьох мас будуть однакові. Таким чином, кількість незалежних геометричних параметрів. які визначають положення всіх мас при деформації елементів рами, дорівнює п’яти. Справді, для повного закріплення всіх мас достатньо ввести два додаткових опорних стержні, які закріплюють всі маси від поступальних переміщень, і три рухомих затиснення, які закріплюють зосереджені маси від повороту (рис.14.2, б).
Якщо можна знехтувати поворотами зосереджених мас, то на розрахунковій схемі ці маси зображуються як точкові (рис.14.2,в). Така рама при урахуванні поздовжніх деформацій стержнів матиме п’ять ступнів вільності (маси m1 i m2 мають по два можливих поступальних переміщення, а маса m3 − тільки горизонтальне переміщення). Якщо вважати стержні рами такими, що не видовжуються і не скорочуються, тобто в разі прийняття передумови про не-
14.Основні положення динаміки споруд |
6 |
стисливість стержнів число ступнів вільності дорівнюватиме двом. Справді, в даному разі для закріплення всіх трьох мас системи достатньо ввести два додаткових опорних стержні (рис.14.2,г).
Якщо в процесі розрахунку виникає необхідність врахувати розподілену масу якогось стержня,
наприклад, ригеля, то дана коливальна система матиме нескінченну кількість ступнів вільності.
14.4. Види коливальних процесів
Залежно від причин, що збуджують коливальний процес, розрізняють такі види коливань:
∙вільні коливання,
∙змушені коливання,
∙автоколивання,
∙параметричні коливання.
Вільні коливання здійснюють системи, які в початковий момент часу виводяться зі стану рівноваги, після чого причини збудження усуваються і система продовжує рух за відсутності зовнішніх дій. Коливання відбуваються за рахунок запасу енергії, яку одержала система при початковому збудженні.
Змушені коливання характеризуються тим, що система перебуває під постійною дією зовнішніх динамічних навантажень. Енергія, яка необхідна для підтримки процесу коливань,
здобувається за рахунок роботи зовнішніх дій.
Параметричні коливання також виникають при зовнішніх діях, проте вони полягають не в дії динамічних навантажень, а зумовлюються змушеною зміною параметрів самої системи − мас або
жорсткостей.
Автоколивання виникають при відсутності зовнішніх дій за рахунок внутрішнього джерела енергії і мають періодичний характер.
Усі реальні коливальні системи мають внутрішнє тертя, внаслідок чого енергія, що підтримує коливальний процес, поступово розсіюється. Відбувається так звана дисипація енергії.
Аналогічний вплив чинить опір середовища, в якому здійснюються коливання. Тому для підтримки процесу коливань необхідно мати постійний приплив енергії, без чого вони затухнуть.
Проте в багатьох випадках затухання має незначну величину, що припускає розв’язання задач без урахування дисипації енергії. Відповідно розрізняють коливання з урахуванням і без урахування сил опору. Для вільних коливань застосовують поняття затухаючих і незатухаючих коливань.
Розрізняють лінійні і нелінійні коливання. Перші з них характерні для так званих лінійних коливальних систем, які описуються лінійними диференціальними рівняннями. Такі коливання називають також малими, або пружними, оскільки лінійна деформівність зберігається лише при
14.Основні положення динаміки споруд |
7 |
малих пружних переміщеннях системи. Для лінійних коливань є справедливим принцип неза-
лежності дії сил (принцип суперпозиції): загальний ефект дії кількох динамічних навантажень можна представити як суму дій кожного з них.
Нарешті можна класифікувати коливання залежно від характеру деформацій, які виникають у системі. З цієї точки зору можна виділити коливання поздовжні, поперечні, крутильні, згинно-
крутні тощо.
14.5. Мета динамічного розрахунку
Основна мета динамічного розрахунку конструкції − забезпечити несучу здатність і допустимі амплітуди коливань. Відповідно до цього в завдання динамічного розрахунку конструкції входить визначення динамічних зусиль та переміщень, зумовлених динамічними деформаціями її елементів. Безпосередньому розв'язанню цього завдання звичайно передує аналіз частот і форм вільних коливань споруди. Згідно з таким аналізом можна достатньо надійно прогнозувати роз-
виток динамічних процесів при різноманітних зовнішніх впливах, а також сформувати ефективні розрахункові динамічні моделі споруди, за допомогою яких виконуються розрахунки для оцінювання величини амплітуд внутрішніх зусиль і переміщень. Рівень допустимих внутрішніх зу-
силь визначається умовами динамічної міцності, а допустимі розмахи коливань конструкції зада-
ються умовами нормальної експлуатації. Тут поряд з можливим порушенням нормального ходу виробничого процесу внаслідок великих амплітуд коливань споруди враховується також шкідливий впив на людей високих рівнів вібрації.
Як правило, виконуючи динамічний розрахунок, безпосередньо визначають характер зміни переміщень споруди, який відповідає розглядуваному режиму коливань. А потім, знаючи перемі-
щення, знаходять внутрішні зусилля в елементах конструкції.
Вважається, що завдання динамічного розрахунку виконано, якщо в результаті аналізу встановлено, що для розглядуваних видів зовнішніх дій забезпечено несучу здатність конструкції,
а розрахункові значення амплітуд коливань не перевищують допустимих. Якщо ж хоча б одна з цих умов не задовольняється, постає проблема знаходження ефективного способу зниження рівня вібрації. В сучасній інженерній практиці існує багато підходів, за допомогою яких можна істотно знизити інтенсивність коливань. Слід зазначити, що такі завдання виникають не тільки на стадії проектування споруди, а й у процесі експлуатації, якщо виявляється, що в існуючій споруді за певних умов розвиваються небезпечні динамічні процеси.




15.Коливання систем з одним ступнем вільності |
4 |
C1 |
asin |
tg |
|
|
|
arctg |
C1 |
arctg |
y0 , |
|||||||
C |
2 |
acos |
|
|
|
|
|
|
|
|
C |
2 |
|
|
v |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
v |
2 |
|
|
2 |
2 |
|
sin |
2 |
cos |
2 |
|
|
|
|
2 |
||||
C1 |
C2 a |
|
|
|
a y0 |
|
0 |
. |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Підставивши вираз (15.11) у формулу (15.7), маємо:
y asin cos t acos sin t,
звідки можемо остаточно записати: |
|
y a sin t . |
(15.12) |
Із розв’язку (15.12) випливає, що вільні коливання без урахування сил опору відбуваються за законом синуса і, отже, є простими гармонічними коливаннями. Графік залежності (15.12) побудовано на рис.15.2.
Рис.15.2
У точках екстремумів, коли sin t 1, функція прогинів y має амплітудні значення a.
Отже, константа a це амплітуда коливань. Величина asin характеризує початкове переміщення маси, а кут початкову фазу коливань.
Оскільки синус є періодичною функцією з періодом 2 , можна записати:
y asin t asin t 2 .
Звідси випливає:
y asin t 2 asin t T .
Отже, період T виражається співвідношенням, с:

15.Коливання систем з одним ступнем вільності |
5 |
|
T |
2 . |
(15.13) |
|
|
|
Величина, c 1 , |
|
|
|
2 |
(15.14) |
|
T |
|
характеризує кількість повних циклів коливань за 2 секунд і називається коловою або
циклічною частотою коливань. У техніці часто використовують величину, що показує кількість повних циклів коливань за одну секунду і називається технічною частотою:
f |
1 |
|
|
. |
(15.15) |
||
|
T |
|
|
2 |
|
||
звідки |
|
|
|
|
|
|
|
T |
|
1 |
. |
|
(15.16) |
||
|
|||||||
|
|
|
|
f |
|
||
Циклічна частота може бути знайдена із співвідношення (15.4): |
|
||||||
|
|
|
|
|
|
||
|
|
|
1 . |
(15.17) |
|||
|
|
|
m 11 |
|
|||
За другим законом Ньютона m Q g , де Q вага маси, g 9,81м
g , де Q вага маси, g 9,81м сек2 прискорення земного тяжіння. Тоді формула (15.17) може набрати вигляду:
сек2 прискорення земного тяжіння. Тоді формула (15.17) може набрати вигляду:
|
g |
|
. |
(15.18) |
|
Q |
11 |
|
|
Оскільки величина Q 11 дорівнює переміщенню yст маси від статичного прикладання її ваги
Q , формулу (15.17) інколи записують інакше:
|
|
|
|
|
g . |
(15.19) |
|
|
y |
|
|
|
ст |
|
|
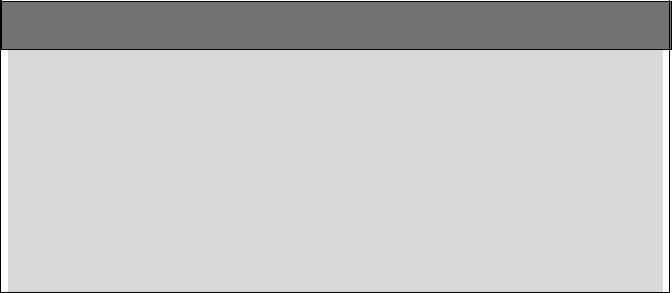
Приклад 15.1. Обчислити період і частоту вільних коливань системи, що зображена на рис.15.3,а. Вага маси Q=1 кН, жорсткість на згин EI 104 кНм2 .
о иванн и тем о ним т пнем ві но ті |
6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ис.15.3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
исте а, |
о ро |
л даєт с , |
ає один ступін |
віл ності |
|
аса m оже пере |
і |
уватис |
у |
ори- |
|||||||||||||||||||||
онтал но |
у напр |
і. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
а рис. |
. |
, |
по удовано епюру |
|
инал ни |
|
о ентів |
|
|
1 від ді |
одинично |
сили, |
ка при- |
||||||||||||||||||
|
M |
||||||||||||||||||||||||||||||
кладена до ра и в |
ісці ро ташуванн |
|
аси і |
|
спр |
|
ована |
|
ори онтал но, |
то то в напр |
і |
||||||||||||||||||||
ожливо о пере |
і |
енн . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Пере і |
енн |
о числює |
о а фор |
улою |
|
ора |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
l M1M1 ds |
1 1 1 1 2 1 |
|
|
|
1 1 2 2 2 2 |
|
|
|
|||||||||||||||||
|
|
|
|
11 |
|
|
EI |
|
|
|
|
EI |
2 |
|
|
3 |
|
|
|
EI |
2 |
|
3 |
|
|
|
|
||||
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
1 |
1 |
3 1 |
2 |
3 |
4,5 |
3 |
4,5 10 |
4 |
/ |
. |
|
|
|
|
||||||||||||
|
|
|
|
|
2EI |
2 |
3 |
|
EI |
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
олова частота віл ни |
коливан |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
g |
|
|
|
|
|
9,81 |
|
/ |
|
|
|
|
147,6 |
|
1 . |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
Q |
|
|
1 |
|
|
|
4,5 10 4 |
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
11 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
е нічна частота |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
f |
2 |
|
147,6 |
|
23,5 |
|
1 . |
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
6,28 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Період коливан |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
T |
1 |
|
|
|
1 |
|
4,255 10 |
2 . |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
f |
|
|
23,5 |
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
15.Коливання систем з одним ступнем вільності |
7 |
T1f 231,5 4,255 10 2 с.
15.3.Вільні коливання при урахуванні сил опору
Рівняння руху вільних коливань з урахуванням сил опору дістанемо, поклавши в рівнянні
(15.5) величину динамічного навантаження P(t) 0. Отже, маємо
S |
|
|
y 2 y m |
0 . |
(15.20) |
Сила S характеризує опір коливанням, який може бути зумовлений внутрішнім тертям в елементах системи, тертям у шарнірах, а також опором зовнішнього середовища. Інколи при проектуванні споруд застосовуються спеціальні прилади (демпфери, гасники коливань), які створюють штучний опір коливанням. При розрахунку будівельних конструкцій найбільший вплив на процес коливань чинить внутрішнє тертя, яке вважається пропорціональним швидкості руху мас, що переміщуються. Тобто вважатимемо, що
S ky , |
(15.21) |
|
|
де k деякий коефіцієнт пропорційності.
Позначимо для зручності подальших викладок |
k 2 , де коефіцієнт затухання коливань. |
||||||
|
|
|
|
|
|
m |
|
Тоді рівняння (15.20) можна переписати в остаточному вигляді: |
|
||||||
|
|
|
y 2 y 2 y 0 . |
(15.22) |
|||
Для розв’язання цього диференціального рівняння запишемо характеристичне рівняння |
|||||||
|
|
|
r2 2 r 2 0. |
(15.23) |
|||
|
|
|
|
|
|
|
|
Від значення дискримінанту |
1 |
|
|
2 2 , |
що входить до розв’язку |
характеристичного |
|
|
|
|
|
|
|
|
|
рівняння |
|
|
|
|
|
|
|
r 
 2 2 ,
2 2 ,
залежить остаточний вигляд розв’язку диференціального рівняння (15.22). Тобто розв’язок залежить від співвідношення величин коефіцієнта затухання коливань і колової частоти .


15.Коливання систем з одним ступнем вільності |
9 |
більший, ніж період незатухаючих коливань (15.13). Розглянемо співвідношення двох будь-яких сусідніх амплітуд:
a i |
|
ae t |
e T1 . |
(15.28) |
||
a |
i 1 |
ae |
t T1 |
|||
|
|
|
|
|
||
Звідси випливає, що відношення будь–яких сусідніх амплітуд є константою, тобто величини амплітуд зменшуються за законом геометричної прогресії. В практичних розрахунках розглядають натуральний логарифм цього співвідношення, який називається логарифмічним декрементом,
ln ai |
T . |
(15.29) |
ai 1 |
1 |
|
|
|
Якщо опір є великим (ε>ω), то розв’язок диференціального рівняння (15.22) може бути представлений у вигляді
y ae tsh 1t . |
(15.30) |
Рух, що описується рівнянням (15.30), не буде коливальним. Система, яка виведена зі стану рівноваги, повертається до вихідного положення (рис.15.5). Такий рух називається аперіодичним.
Рис.15.5
У разі, якщо (так зване критичне затухання), розв’язок диференціального рівняння руху (15.22) набуває вигляду:
y e t C1 C2 t . |
(15.31) |
Такий рух також є аперіодичним.
15.4. Змушені коливання в разі відсутності сил опору
Якщо на систему в разі відсутності сил опору діє динамічне навантаження P(t), то маємо неоднорідне диференціальне рівняння руху:

15.Коливання систем з одним ступнем вільності |
10 |
2 |
P t |
|
|
y y |
m |
. |
(15.32) |
Розв’язок неоднорідного рівняння є сумою загального розв’язку y0 відповідного однорідного
рівняння (15.6) |
і частинного розв’язку y , вигляд якого залежить від вигляду правої частини |
||
рівняння: |
|
|
|
|
y y0 y . |
|
(15.33) |
Величина y0 |
у розв’язку (15.33) характеризує вільні, а |
y |
змушені коливання. Розв’язок |
однорідного рівняння було одержано в п.15.2: |
|
|
|
|
y0 asin t . |
|
(15.34) |
15.4.1. Дія вібраційного навантаження
Вібраційне навантаження являє собою узагальнену силу, яка змінюється за гармонічним
законом |
|
P(t ) P0sinθt , |
(15.35) |
де P0 амплітудна величина динамічного навантаження, колова (циклічна) частота зміни навантаження, яка звичайно пов’язується з кількістю n обертів двигуна за хвилину:
|
n . |
(15.36) |
|
30 |
|
У разі дії вібраційного навантаження (15.35) диференціальне рівняння (15.32) перепишеться в такий спосіб:
y 2 y |
P0 sin t |
(15.37) |
|
m |
|
Шукатимемо частинний розв’язок у вигляді: |
|
y C1sinθt C2cosθt . |
(15.38) |
Друга похідна частинного розв’язку набере вигляду: |
|
y C1 2sin t C2 2cos t . |
(15.39) |
Підставимо вирази (15.38) і (15.39) у рівняння (15.37) і виконаємо зведення подібних членів:


15.Коливання систем з одним ступнем вільності |
12 |
||||
P0 P |
|
|
|
(15.44) |
|
m 2 |
0 |
11 |
|
|
|
|
|
|
|
|
|
дорівнює переміщенню ycт від дії статично прикладеної сили P0 . |
|
||||
Отже, можна записати: |
|
|
|
|
|
|
A yст . |
(15.45) |
|||
Безрозмірний коефіцієнт |
|
|
|
|
|
|
|
1 |
2 , |
(15.46) |
|
|
2 |
||||
|
1 |
|
|
|
|
який показує в скільки разів амплітуда прогину при динамічному прикладенні навантаження перевищує прогин при статичному прикладенні, називається динамічним коефіцієнтом. Залежності, аналогічні (15.45), можуть бути записані і для будь-яких статичних і кінематичних факторів: опорних реакцій, згинальних моментів, поздовжніх і поперечних сил, деформацій, напружень тощо. Тобто у загальному вигляді
Sдин Sст , |
(15.47) |
де Sдин,Sст величини фактора S відповідно при динамічному і статичному навантаженні.
Таким чином, в системі з одним ступнем вільності для визначення зусиль або переміщень від динамічного навантаження достатньо обчислити відповідні величини при статичному прикладанні навантаження і помножити результати на динамічний коефіцієнт.
Величина динамічного коефіцієнта повністю визначає напружено-деформований стан динамічної системи і залежить від співвідношення частот змушених і вільних коливань. На рис.15.7,а побудовано графік залежності динамічного коефіцієнта за абсолютним значенням.
Коли / наближається до одиниці, коефіцієнт швидко зростає, а коли вільна і змушена
частоти коливань збігаються (  1), обертається на нескінченність. Таке явище називається
1), обертається на нескінченність. Таке явище називається
резонансом. Коли настає резонанс, усі параметри, що характеризують напружено-деформований стан системи (переміщення, напруження тощо), набувають нескінченно великих значень. Це призводить до руйнування конструкції. Втім розвиток нескінченно великих параметрів чиниться не миттєво, а впродовж певного відрізка часу (рис.15.7,б).

15.Коливання систем з одним ступнем вільності |
13 |
Рис.15.7
Приклад 15.2. Побудувати епюру згинальних моментів у рамі (рис.15.8,а), що знаходиться під дією горизонтальної динамічної сили P P0sin t , P0 4 кН, 125,6 сек-1. Вага маси
Q=1 кН, EI=104 кНм2.
Рис.15.8
З розрахунку рами на вільні коливання (див.приклад 15.1) маємо колову частоту =147,6 сек-1.
За формулою (15.46) обчислимо динамічний коефіцієнт:
1 3,625. 1 125,62 147,62
Епюра згинальних моментів Mст від статичного прикладення амплітудного значення сили
P0 4 кН побудована на рис. 15.8,б. Епюра згинальних моментів від динамічної сили побудована на рис.15.8,в у відповідності з формулою (15.47):
Mдин Mст 3,625Mст.

15.Коливання систем з одним ступнем вільності |
14 |
15.4.3. Дія раптово прикладеної сили
Нехай сила P раптово прикладається до системи і залишається |
надалі незмінною, тобто |
|||
P t P . Тоді рівняння руху (15.32) набере вигляду: |
|
|
||
|
|
P |
|
|
y 2 y m . |
|
(15.48) |
||
Загальний розв’язок шукатимемо у формі |
|
|
|
|
y C cos t C |
2 |
sin t P . |
(15.49) |
|
1 |
|
m 2 |
|
|
|
|
|
|
|
Два перших доданки характеризують вільні, а третій змушені коливання. Тобто цей третій
доданок становить частинний розв’язок задачі. Константи інтегрування C1 i C2 можуть бути визначені на підставі початкових умов руху: в момент часу t 0 переміщення маси і швидкість її
руху дорівнюють нулю, тобто y0 0 |
i v0 |
y0 0. |
На основі рівняння (15.49) ці умови |
||
запишуться в такий спосіб: |
|
|
|
|
|
y C P m 2 0 |
|
C P m 2 |
, |
||
0 |
1 |
|
|
1 |
|
y0 C2 0 |
|
C2 0. |
|
|
|
Беручи до уваги позначення (15.4) можемо записати як |
|
|
|||
|
C1 P 11 |
yст, |
|
(15.50) |
|
де yст переміщення маси від статичного прикладання сили P.
Підставивши знайдені величини констант у рівняння (15.49) одержимо: |
|
y yст 1 cos t . |
(15.51) |
У графічній формі цей розв’язок представлено на рис.15.9. Отже, маса коливається навколо статичного положення рівноваги yст з амплітудою A yст. Максимальне відхилення становить ymax = 2yст, а динамічний коефіцієнт ymax yст 2 .
yст 2 .

15.Коливання систем з одним ступнем вільності |
15 |
Рис.15.9
15.5. Змушені гармонічні коливання при урахуванні сил опору
Розглянемо дію на систему гармонічної сили P P0sin t . У даному випадку диференціальне
рівняння руху (15.5) з урахуванням позначення |
k |
2 і співвідношення (15.22) перепишеться у |
||
|
m |
|
|
|
вигляді |
|
|
|
|
y 2 y 2 y |
P0 sin t . |
(15.52) |
||
|
|
|
m |
|
Як завжди, розв’язок неоднорідного диференціального рівняння (15.52) складається із
загального розв’язку однорідного диференціального рівняння |
y0 і частинного розв’язку y , який |
|
характеризує змушені коливання: |
|
|
y y0 |
y . |
(15.53) |
Отже, переміщення маси є накладанням двох коливальних процесів, один із яких описується
розв’язком задачі про вільні коливання (15.26): |
|
y0 ae tsin 1t , |
(15.54) |
а другий, що характеризує змушені коливання, будемо розшукувати у формі: |
|
y C1sin t C2cos t . |
(15.55) |
Запишемо першу і другу похідні частинного розв’язку (15.55): |
|

15.Коливання систем з одним ступнем вільності |
17 |
Справді, можна впевнитись, що, по-перше, величини (15.61) є меншими за одиницю і, подруге, виконується таке співвідношення:
2 |
2 |
|
2 2 2 2 2 |
1. |
sin |
cos |
2 |
||
|
|
|
|
Отже, довільні константи інтегрування з урахуванням позначень (15.61) набудуть вигляду
C |
|
P0 |
cos , |
C |
|
|
P0 |
sin , |
(15.63) |
|
1 |
m |
|
|
|
2 |
|
m |
|
|
|
Зрештою маємо розв’язок рівняння (15.55) у формі |
|
|
|
|
|
|||||
y |
P0 |
|
sin t cos cos t sin , |
(15.64) |
||||||
|
|
m |
|
|
|
|
|
|
|
|
або остаточно:
y |
P0 |
sin t . |
(15.65) |
|
m |
|
|
Із рівняння (15.65) можна дійти висновку: змушені коливання при дії вібраційного навантаження є періодичними, відбуваються з такою ж частотою, що й навантаження, і мають амплітуду
A |
P0 . |
(15.66) |
|
m |
|
На рис.15.10 зображено складові коливального процесу. По-перше, це графік вільних коливань з урахуванням опору (15.54). Йдеться про вільні коливання (рис.15.10,а), які досить швидко затухають.

15.Коливання систем з одним ступнем вільності |
18 |
Рис.15.10
По-друге, це графік змушених коливань, що описуються рівнянням (15.65). І, по-третє, це графік сумарного руху (рис.15.10,в), який є сумою двох попередніх графіків. На останньому графіку можна виділити дві зони:
1.Зона, де вплив вільних коливань є відчутним. Це так звані неусталені, або нестаціонарні, коливання.
2.Зона, де вільні коливання повністю або майже повністю затухли. Це суто змушені коливання,
які називають усталеними, або стаціонарними, коливаннями.
Розглянемо докладніше амплітуду змушених коливань (15.66). З урахуванням позначення (15.60) можемо записати:
A |
P0 |
|
1 |
|
. |
m |
2 2 2 |
|
|||
|
|
4 2 2 |
|||
Якщо винести частоту вільних коливань з-під знака радикала, то матимемо
A |
P0 |
|
|
1 |
|
. |
(15.67) |
|
2 |
|
|
||||
m |
1 2 2 2 |
|
|||||
|
|
4 2 2 4 |
|
||||

15.Коливання систем з одним ступнем вільності |
19 |
Звернемо увагу на те, що перший співмножник становить переміщення від статичної дії навантаження:
P0 2 P0 11 yст
m
і позначимо:
|
|
1 |
|
. |
(15.69) |
|
|
|
|||
1 2 2 |
2 |
|
|||
|
4 2 2 4 |
|
|||
Тоді амплітуду переміщень змушених коливань (15.67) можна представити у формі: |
|
||||
|
A yст . |
(15.70) |
|||
Отже, це динамічний коефіцієнт для вібраційного навантаження при урахуванні сил опору.
Для переважної більшості будівельних конструкцій можна вважати що . В такому разі з урахуванням позначень (15.27) і (15.29) динамічному коефіцієнту (15.69) можна надати вигляду
= |
|
1 |
|
1 2 |
2 2 2 2 . |
(15.71) |
На рис.15.11 зображено графіки залежності динамічного коефіцієнту від співвідношення
частот θ ω при різних значеннях логарифмічного декремента γ.
ω при різних значеннях логарифмічного декремента γ.
Із графіка видно, що урахування |
сил |
опору 0 зменшує значення динамічного |
коефіцієнта. В межах, коли θ ω 0,7 |
або |
θ ω 1,3 врахування сил опору мало впливає на |
динамічний коефіцієнт. У разі, коли частоти вільних і змушених коливань збігаються, тобто у випадку резонансу, при наявності сил опору динамічний коефіцієнт має скінченне значення.
Справді, із формули (15.71) випливає, що в разі, коли , динамічний коефіцієнт
|
. |
(15.72) |
|
|
|

15.Коливання систем з одним ступнем вільності |
20 |
Рис.15.11

О П А
16. истеми з кількома ступнями вільності
Зміст глави
. . |
івн нн |
ру у |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
16.2. Віл ні коливанн |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
. |
. |
. |
івн нн |
ру у та |
ній ро в |
ок |
|
|
|
|
|
|
|
|
||||||||
|
. |
. |
. Властивості |
оловни |
фор |
коливан |
|
|
|
|
|
|
|
||||||||||
|
. |
. |
. Приклад ро ра унку ра |
и на віл ні коливанн |
|
|
|
|
|
||||||||||||||
|
. |
. . Використанн си етрі |
|
|
|
|
|
|
|
|
|
|
|
||||||||||
. . |
ушені коливанн |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
. |
. |
. |
|
ушені коливанн |
при ар |
онічно |
у навантаженні |
|
|
|
|
|||||||||||
|
. |
. |
. Приклад ро ра унку ра |
и на |
ушені коливанн |
|
|
|
|
|
|||||||||||||
|
. |
. |
. |
о кладанн |
навантаженн |
а оловни и фор а |
и коливан |
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
исте |
а |
и |
|
n ступн |
и віл ності в дина |
іці споруд на ивают |
такі систе и, |
положенн |
ас |
|||||||||||||
ки |
в |
уд - |
кий |
о |
ент часу ви начаєт с |
n пара |
етра и. Приклада |
и таки |
систе |
ожут |
ути |
||||||||||||
фер |
а, |
алка чи плоска ра |
а, |
к |
о |
аси окре и |
ні |
частин а о еле ентів у овно вважают с |
|||||||||||||||
осереджени |
и в окре |
и |
точка , |
а о |
к |
о на ни |
ро ташовано кіл ка велики |
ас, порівн но |
|||||||||||||||
ки |
и |
ожна |
не тувати власною ва ою еле |
ентів конструкцій, і дл повно о |
акріпленн всі |
||||||||||||||||||
ас на систе |
у нео |
ідно накласти n кіне |
атични |
в |
ей. |
о то до систе |
кіл ко а ступн |
и |
|||||||||||||||
віл ності |
ожна віднести нева о |
і систе |
и, |
на |
ки |
ро ташовані |
осереджені |
аси. |
к о дл |
||||||||||||||
ро ра унку систе |
|
одни |
ступне |
|
віл ності потрі но |
уло складати одне |
диференціал не |
||||||||||||||||
рівн нн |
ру у |
див. |
л. |
, |
то дл систе |
і |
а ат |
а ступн |
и віл ності доведет с |
складати і ро - |
|||||||||||||
в |
увати систе |
у диференціал ни |
рівн н |
ру у. |
|
|
|
|
|
|
|
|
|||||||||||

и теми |
і |
ома |
т пн ми ві |
но ті |
|
2 |
|
16.1. |
івняння руху |
|
|
|
|
|
|
о |
л не о нева о у |
алку, на кій ро ташовано n точкови |
ас |
рис. . ,а . Вважати е о, о |
|||
на алку діє у а ал нене дина |
ічне навантаженн |
P(t). ила |
и де |
пфіруванн не тує о. |
|||
|
|
|
|
|
|
|
|
|
ис. . |
|
|
|
|
|
|
|
|
|
исте |
а, |
о ро |
л даєт с , |
ає n ступнів віл ності. |
правді, положенн всі |
ас при |
уд - |
ки |
||||||||||
ожливи |
пере |
і |
енн |
ви начаєт с |
n не алежни |
и |
ео етрични и пара етра и, а са е |
|||||||||||
поступал ни |
и |
пере і |
енн |
и |
ас |
y1, y2, , yn. |
і |
дл |
усуненн |
нео |
ідно |
|
ввести n |
|||||
додаткови |
опорни |
стержнів. |
|
|
|
|
|
|
|
|
|
|
|
|||||
л |
складанн |
рівн н |
ру у |
астосує о принцип |
ала |
ера у поєднанні |
етодо |
сил. |
ідно |
|||||||||
принципо |
ала |
ера |
овнішні сили, |
кі діют на систе |
у, пружні сили та сили інерці |
вл ют |
||||||||||||
со ою |
рівноважену систе у сил. |
|
|
|
|
|
|
|
|
|
|
|||||||
о |
л не |
о |
о |
ент часу, |
коли всі аси ру ают с |
вни |
рис. |
. , . При ц о |
у на |
алку діют |
||||||||
сили інерці |
F1, F2, , Fn , кі виражают с співвідношенн |
и |
|
|
|
|
|
|
||||||||||
F1 |
m1 y1; |
|
F2 |
m2 y2 |
; |
|
(16.1) |
|
|
||
Fn |
mn yn. |
|
и теми |
|
і |
ома |
т пн ми ві |
но ті |
|
|
|
|
|
|
|
|
3 |
||||||||
л |
виведенн |
рівн н |
ру у створи о допо |
іжні стани |
алки, |
авантажуючи |
почер ово |
|||||||||||||||
статично прикладени и одинични и |
сила и |
інерці |
і одинични |
овнішні |
навантаженн |
|||||||||||||||||
рис. . |
, ,в, ,д . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
а підставі принципу не алежності ді |
сил |
|
оже |
о |
аписати повні пере і |
енн |
ас |
к су у |
||||||||||||||
пере і |
ен |
від ді |
кожно сили окре о |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
y1 |
11F1 |
12F2 |
|
|
|
1nF1 |
|
1 pP(t); |
|
|
|
||||||
|
|
|
|
|
y2 |
21F1 |
22F2 |
|
|
|
2nF2 |
|
2 pP(t); |
|
|
(16.2) |
||||||
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
yn |
n1F1 |
n2F2 |
|
|
|
nnFn |
|
npP(t). |
|
|
|
||||||
Підставивши до співвідношен |
. |
вира и дл |
сил інерці |
16.1 |
і перенісши вантажні |
|||||||||||||||||
пере і |
енн |
в праву частину одержує о систе |
у |
вичайни |
диференціал ни |
рівн н |
дру о о |
|||||||||||||||
пор дку, кі ви начают ру |
систе |
и |
n ступн |
и віл ності |
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
11m1 y1 |
12m2 y2 ... |
1nmn yn |
|
y1 |
1P P t ;, |
|
|
|
|
||||||||
|
|
|
|
|
21m1 y1 |
22m2 y2 ... |
2nmn yn |
y2 |
|
2P P t ;, |
|
|
|
|||||||||
|
|
|
|
|
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
|
|
(16.3) |
||||||||||||||
|
|
|
|
|
n1m1 y1 |
|
n2m2 y2 ... |
|
nnmn yn |
yn |
|
nP P t . |
|
|
|
|
||||||
л |
то о |
о |
цілко |
ви начити коливал ний |
процес, |
систе |
у рівн н |
. |
нео ідно |
|||||||||||||
доповнити початкови |
и у |
ова |
и, |
о |
адают пере і |
енн |
та швидкості |
ас при t = 0: |
|
|
||||||||||||
|
|
|
|
|
|
|
yi (0) |
yi0, |
|
|
|
|
|
|
|
|
|
|
|
(16.4) |
||
|
|
|
|
|
|
|
yi (0) |
yi0 (i |
|
1,...,n) |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
По начи |
о сукупніст пере |
і |
ен |
ас і |
овнішні |
дина |
ічни |
сил у ви л ді векторів |
|
|||||||||||||
|
|
|
|
|
|
|
yT |
y1 y2 yn |
, |
|
|
|
|
|
|
|
|
(16.5) |
||||
|
|
|
|
|
|
|
yT |
y1 |
y2 yn |
, |
|
|
|
|
|
|
|
|
(16.6) |
|||
|
|
|
|
|
|
|
|
T |
|
t |
|
|
t |
|
|
|
t |
|
|
|
|
(16.7) |
|
|
|
|
|
|
|
|
t |
1P |
|
2P |
nP |
|
|
|
|
||||||
Пере і |
енн |
|
і навантаженн |
ожна в |
ати співвідношенн |
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
t |
pP t , |
|
|
|
|
|
|
|
|
|
|
|
(16.8) |
|
тут TP |
1P |
2P |
nP |
– пере і |
енн |
ас від одинично |
овнішн о сили (рис. |
. ,ж). |
||||||||||||||

и теми |
і |
ома т пн ми ві |
но ті |
|
|
|
4 |
|||||
к |
о ввести |
атрицю |
ас – діа онал ну |
атрицю, на діа оналі ко |
ро ташовані величини |
|||||||
точкови |
ас |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m1 |
0 |
... |
|
0 |
|
|
|
|
|
|
M |
|
. |
m2 |
... |
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
, |
(16.9) |
|
|
|
|
|
|
|
... |
... |
... |
... |
|
||
|
|
|
|
|
|
. |
|
|
|
mn |
|
|
то систе |
у диференціал ни |
рівн н |
16.3 ожна |
аписати в |
атричній фор і |
|||||||
|
|
|
|
|
BMy(t) y(t) |
p P |
t . |
(16.10) |
||||
ут, к і раніше, чере B по начено |
атрицю податливості |
|
|
|
||||||||
|
|
|
|
|
|
11 |
12 |
... |
1n |
|
|
|
|
|
|
|
|
B |
21 |
22 |
... |
2n |
|
, |
(16.11) |
|
|
|
|
|
... ... ... ... |
|
||||||
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
n1 |
n2 |
... |
nn |
|
|
|
коефіцієнти ко |
ожут |
ути о числені а допо о ою фор |
ули аксвела- |
ора див.підро д. . ). |
||||||||
|
|
|
|
|
|
|
ис. . |
|
|
|
|
|
|
випадку, |
коли всі овнішні сили прикладені лише до точкови |
|
ас |
рис. . |
і складают |
||||||||
вектор овнішні |
дина |
ічни |
сил |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
PtT |
P1 t |
P2 t |
Pn |
t , |
|
|
|
(16.12) |
вантажні пере і |
енн |
ожут |
|
|
ути виражені чере |
атрицю податливості |
|
|
|||||
|
|
|
|
|
1P |
t |
11 |
12 ... |
1n |
P1 |
t |
|
|
|
|
|
|
2P |
t |
21 |
22 ... |
2n |
P2 |
t |
|
||
|
|
|
|
t |
|
... ... ... ... |
|
BPt |
(16.13) |
||||
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
nP |
t |
n1 |
n2 ... |
nn |
Pn |
t |
|
|

и теми |
і |
|
ома |
|
|
т пн ми ві |
но ті |
|
|
|
|
|
|
|
8 |
||||||||||||
а анало ією |
коливанн |
|
и систе |
и |
одни |
|
ступне |
віл ності |
уде о ро шукувати ро в ок |
||||||||||||||||||
систе и диференціал ни |
|
|
рівн н |
16.16 , припускаючи, |
о коливанн |
|
всі |
ас від увати ут с |
|||||||||||||||||||
однаковою частотою |
і фа ою |
|
: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
y |
a sin |
|
t |
, |
y |
a |
2 sin |
t |
; |
|
|
||||||||||||
|
|
|
|
|
|
1 |
|
1 |
|
|
|
|
|
|
|
1 |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
y |
2 |
a |
sin |
|
t |
, |
y |
2 |
a |
2 sin |
t |
; |
|
|
|||||||||
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
(16.17) |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
, |
|
|
|
|
|
|
. |
|
|
||||||
|
|
|
y |
n |
a |
sin |
|
t |
y |
n |
a |
2 sin |
t |
|
|
||||||||||||
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|||
Підстави о співвідношенн |
|
|
.17 |
у рівн нн |
|
. |
|
|
і скороти |
о на sin |
t |
: |
|||||||||||||||
|
|
m a |
|
2 |
|
|
m a |
2 |
... |
|
|
m a |
2 |
a |
|
0, |
|
|
|||||||||
|
|
11 1 1 |
|
12 2 2 |
|
|
|
1n n n |
|
1 |
|
|
|
|
|||||||||||||
|
|
|
|
|
|
m a |
|
2 |
|
|
m a |
2 |
|
... |
|
m a |
2 a |
|
0, |
|
|
||||||
|
|
|
21 1 1 |
|
|
22 2 2 |
|
|
|
|
2n n n |
|
2 |
|
|
|
(16.18) |
||||||||||
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
m a |
|
2 |
|
n |
m a |
2 |
|
... |
|
m a |
2 |
a |
|
0. |
|
|
|||||
|
|
|
n1 1 1 |
|
|
2 2 2 |
|
|
|
|
|
nn n n |
|
n |
|
|
|
|
|||||||||
Поділивши рівн нн на |
2 |
і по начивши |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
, |
|
|
|
|
|
|
|
|
|
(16.19) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
рештою одержи |
о |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
11m1 |
|
a1 |
12m2a2 |
|
... 1nmnan |
0, |
|
|
|
|
|||||||||||||
|
|
|
21m1a1 |
|
22m2 |
a2 |
|
... |
|
2nmnan 0, |
|
|
|
(16.20) |
|||||||||||||
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
n1m1a1 |
n2m2a2 ... |
|
nnmn |
an |
0. |
|
|
|
|
|||||||||||||||
исте а лінійни |
ал е ра чни |
рівн н . |
|
|
ає тривіал ний ро в |
ок |
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
a1 |
a2 |
|
an |
|
0, |
|
|
|
|
|
|
(16.21) |
|||||
о відповідає відсутності коливан . о в |
ок, коли принай |
ні одна а плітуда від |
інна від нул , є |
||||||||||||||||||||||||
ожливи лише |
а у |
ови дорівнюванн нулю ви начника систе |
и рівн н . |
|
|||||||||||||||||||||||
|
|
|
|
|
m1 11 |
|
|
|
m2 12 |
|
|
|
|
|
mn 1n |
|
|
|
|
||||||||
|
|
D |
|
|
m1 21 |
|
|
|
m2 22 |
|
|
|
|
m2 2n |
|
|
0. |
(16.22) |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
m1 n1 |
|
|
|
m2 n2 |
|
|
|
|
mn nn |
|
|
|
||||||||||

|
и теми |
|
і |
|
ома |
|
т пн ми ві |
но ті |
|
|
|
|
|
|
|
|
|
|
9 |
||||||||||||||||
|
івн нн |
(16.22) |
на иваєт с |
частотни |
|
а о |
арактеристични |
. Воно |
є у овою на вності |
||||||||||||||||||||||||||
|
коливан і |
оже ро |
л датис |
|
к нелінійне ал е ра чне рівн нн |
стосовно числа . |
правді, к |
о |
|||||||||||||||||||||||||||
|
ро крити ви начник, одержи |
о |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
n |
|
b1 n |
1 |
|
|
b2 n |
2 |
bn |
1 |
bn |
|
0. |
|
|
|
(16.23) |
|||||||||
|
івн нн |
|
|
.23 |
ає n коренів |
|
i |
|
|
|
i=1,2, ,n |
, причо |
у, оскіл ки в |
адача |
удівел но |
||||||||||||||||||||
|
е аніки |
атриці B та M авжди си |
етричні, |
всі корені |
удут |
дійсни |
и додатни и числа и. |
а |
|||||||||||||||||||||||||||
|
підставі рівн нн |
16.19 |
кожно |
у кореню відповідає певна частота віл ни коливан |
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
i |
1,2, ,n . |
|
|
|
|
|
|
|
(16.24) |
||||
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
i |
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
Ви од чи |
фі ично о |
істу величина |
|
повинна |
ути додатною, то |
у |
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
i |
1,2, ,n . |
|
|
|
|
|
|
|
(16.25) |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Отже, систе а, |
о |
ає |
n |
ступнів |
дина |
ічно |
віл ності, |
оже |
коливатис |
n |
частота |
и. |
||||||||||||||||||||||
|
укупніст |
усі |
частот |
i |
i |
|
1,2, ,n |
утворює спектр частот. |
о ташує |
о частоти в пор дку |
|||||||||||||||||||||||||
|
іл шенн |
|
1 |
2 |
|
|
3 |
|
|
|
n . |
|
|
|
ай |
|
|
енша частота |
1 |
на иваєт с частотою основного |
|||||||||||||||
|
тону коливан , а решта частот |
обертонами. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
ожній частоті, то то кожно у кореню |
|
|
i |
|
i=1,2, ,n |
, відповідає сукупніст |
|
а плітуд |
||||||||||||||||||||||||||
|
a1,a2 , ,an . Проте дорівнюванн |
|
нулю ви начника |
16.22 |
є свідченн |
лінійно |
|
алежності |
|||||||||||||||||||||||||||
|
систе |
и ал е ра чни |
рівн н |
|
16.20 , то то принай |
ні одне |
рівн н |
є лінійною ко |
інацією |
||||||||||||||||||||||||||
|
інши . |
к |
о відкинути це рівн нн , одержи |
|
о n - |
рівн нн |
n невідо |
и и. Отже, |
ожна найти |
||||||||||||||||||||||||||
|
лише співвідношенн |
іж невідо |
и |
и а |
плітуда |
и, але не |
ні а солютні величини. |
вичайно при |
|||||||||||||||||||||||||||
|
виконанні |
практични |
ро ра унків |
одну |
і |
|
|
а |
плітуд |
прий ают |
|
а |
одиницю. |
оді |
стовпец |
||||||||||||||||||||
|
рівн н |
(16.20 , |
кий |
істит |
цю а |
плітуду, |
ро |
л даєт с |
к стовпец |
|
віл ни членів. |
|
n р дків |
||||||||||||||||||||||
|
систе |
и рівн н |
ви ирают |
n-1) |
|
уд - |
ки |
р дків, |
кі ро |
л дают |
|
к нову систе |
у рівн н , |
о |
|||||||||||||||||||||
|
вже ає праву частину. Отже, |
а |
плітуди власни |
коливан ви начают с |
точністю до |
|
ножника. |
||||||||||||||||||||||||||||
|
о в |
ок ціє |
ново систе и рівн н |
|
ви начає всі інші а |
плітуди. |
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
арактеристичне рівн нн |
устрічаєт с |
в а ат о |
|
адача |
науки і те ніки. окре |
а, в астроно і воно |
|
|
|
|||||||||||||||||||||||||
|
астосовуєт с |
дл ви наченн |
|
урен |
|
ру у планет і на иваєт с |
вікови |
рівн нн . |
|
|
|
|
|
||||||||||||||||||||||


и теми |
і ома т пн ми ві но ті |
12 |
|
|
|
|
|
|
|
ис. . |
|
|
|
|
|
||
Проаналі ує |
о відношенн |
ци |
|
дво |
пере |
і ен |
і |
важаючи на те, |
о а плітуди пере |
і ен |
||||
ас є константа |
и, отри ає о |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
yji |
aji sin |
it |
i |
aji =const . |
|
|
|
(16.29) |
||||
|
|
y |
ki |
a |
ki |
sin |
i |
t |
|
a |
|
|
|
|
|
|
|
|
|
|
i |
ki |
|
|
|
|
|||
Властивість 2 властивість ортогональності головних форм коливань") |
су |
а до утків |
||||||||||||
ас систе и на відповідні а плітуди дво |
|
оловни |
фор |
коливан дорівнює нулю. |
|
|
|
|||||||
о л не о а |
плітуди дво |
оловни |
|
фор |
коливан |
оловну фор |
у i рис. . |
,а |
та |
оловну |
||||
фор у k рис. . |
, , причо у |
i |
|
k . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ис. . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Пере і енн |
|
аси |
уд - |
ко |
|
аси |
m j |
в |
|
|
оловни |
|
фор |
а |
|
|
i |
і k |
|
арактери уєт с |
|||||||||||||
співвідношенн |
и |
yji |
aji sin |
|
it |
i |
і |
yjk |
ajk |
sin |
|
kt |
|
|
k |
відповідно. Під час ру у аси |
|||||||||||||||||
m j |
виникают сили інерці . В |
оловній фор |
і і |
частотою |
i |
сила інерці |
|
|
|
|
|||||||||||||||||||||||
|
|
|
F |
ji |
m |
j |
y |
ji |
m |
a |
ji |
2 sin |
i |
t |
|
|
|
B |
ji |
sin |
i |
t |
|
|
, |
|
(16.30) |
||||||
|
|
|
|
|
|
j |
|
|
i |
|
|
|
i |
|
|
|
|
|
|
|
i |
|
|
|
|
||||||||
а в |
оловній фор |
і і |
частотою |
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F |
jk |
m |
j |
y |
jk |
m |
j |
a |
jk |
2 sin |
|
k |
t |
|
k |
|
B |
jk |
sin |
|
|
k |
t |
|
k |
. |
(16.31) |
|||
|
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
и теми |
і |
ома |
|
т пн ми ві но ті |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
13 |
||||||||||||||||||
ут Bji , Bjk |
– а |
плітудні величини сил інерці , |
|
кі |
у |
овлені ру о |
|
|
|
аси m j відповідно в |
||||||||||||||||||||||||||||
оловни фор а |
коливан |
i |
та k: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
B |
ji |
|
m |
j |
a |
ji |
2 , |
|
|
|
B |
jk |
|
m |
a |
jk |
2 . |
|
|
|
|
|
|
|
|
|
|
|
(16.32) |
||||
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
|
|
|
j |
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Приклавши а плітудні сили інерці |
|
до |
алки |
оже |
|
о, |
ідно до принципу ала |
ера, вважати, |
||||||||||||||||||||||||||||||
о вона пере уває у стані рівнова и. Отже, |
|
|
ає |
о два |
рівноважени |
|
|
стани |
оловну фор у |
|||||||||||||||||||||||||||||
коливан i та оловну фор |
у коливан |
|
|
|
k. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
апише о ро оту сил стану i на пере |
|
і |
енн |
|
стану k: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
A |
|
|
n |
B |
|
a |
|
|
|
|
|
n |
m |
|
a |
|
2a |
|
|
2 |
n |
m |
a |
|
|
a |
|
|
. |
|
|
|
||||
|
|
ik |
|
|
ji |
jk |
|
|
|
j |
ji |
jk |
|
ji |
jk |
|
|
(16.33) |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
i |
|
j |
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
j 1 |
|
|
|
|
|
|
|
j |
1 |
|
|
|
|
|
|
|
|
|
j |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
о ота сил стану k на пере |
і енн |
|
|
|
стану i: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
n |
|
|
|
|
2 a |
|
|
2 |
n |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
A |
ki |
|
|
B |
jk |
a |
ji |
|
|
|
m |
j |
a |
jk |
ji |
|
|
m |
j |
a |
jk |
a |
ji |
. |
|
(16.34) |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
k |
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
j 1 |
|
|
|
|
|
|
|
j |
1 |
|
|
|
|
|
|
|
|
|
j |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
а підставі теоре и про в ає ніст ро іт див.п. . . оже о аписати
|
|
|
|
|
|
|
Aik |
|
Aki , |
|
|
|
|
а о |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Aik |
Aki |
0. |
|
|
(16.35) |
|
Перепише |
о |
.3 |
|
ура уванн |
рівн н |
.33) та (16.34): |
|
|
|||||
|
|
|
|
|
n |
|
|
|
n |
|
|
|
|
|
|
|
|
2 |
mjajiajk |
|
2 |
mjajk aji |
0. |
(16.36) |
|||
|
|
|
|
i |
|
k |
|||||||
|
|
|
|
|
j 1 |
|
|
|
j |
1 |
|
|
|
Оскіл ки |
від |
переставленн |
спів |
|
ножників |
до уток |
не |
інюєт с , |
величини су у |
||||
співвідношенні (16.3 |
дорівнюют |
одна одній. |
о |
у |
оже о |
аписати |
|
||||||
|
|
|
|
|
|
2 |
2 |
n |
mjajk aji |
0. |
|
|
|
|
|
|
|
|
|
|
|
(16.37) |
|||||
|
|
|
|
|
|
i |
k |
|
|
||||
|
|
|
|
|
|
|
|
j 1 |
|
|
|
|
|
В вши до ува и, |
о |
i |
k , до оди |
о висновку, |
о |
|
|
|
|||||
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m ja jk a ji |
0. |
|
|
(16.38) |
|||
|
|
|
|
|
j |
1 |
|
|
|
|
|
|
|

и теми |
і |
ома |
т пн ми ві но ті |
14 |
відси випливає, |
о не існує дво оловни фор коливан , всі відповідні а |
плітуди ки |
||
ают однакові |
наки. |
|
|
|
16.2.3. Приклад розрахунку рами на вільні коливання |
|
|||
о ра увати ра у |
рис. . ,а |
на віл ні коливанн а таки ви ідни дани l=3 |
, h=3 , m1=m, |
|
m2=2m. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ис. . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ожливі пере |
і |
енн |
ас y1, y2 , y3 |
о ражені на рис. |
. , |
. Проте на підставі |
не туванн |
||||||||||||||||||||||||||
по довжні и дефор аці |
и стержнів ра |
и |
ожна вважати, |
о |
y3 |
y1. Отже, ра а |
ає два |
|||||||||||||||||||||||||||
ступн |
віл ності |
не алежні пере |
і |
енн |
y1 |
i y2 . |
аса, |
о |
пере |
і |
уєт с |
в |
напр |
і |
y1, |
|||||||||||||||||||
становит m1 m2 3m , |
а в напр |
і y2 |
становит m1 |
m . |
апише |
о систе |
у ал е ра чни |
|||||||||||||||||||||||||||
рівн н |
16.20 |
дл дано о випадку |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
3m |
|
|
a |
|
m |
|
a |
2 |
|
0; |
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
11 |
|
|
1 |
|
12 |
|
|
|
|
|
|
|
|
|
|
|
(16.39) |
|||||
|
|
|
|
|
|
|
|
|
|
|
3m 21a1 |
|
m 22 |
|
a2 |
0, |
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
де a1, a2 |
а |
плітуди відповідно |
пере |
і |
ен |
y1 |
і y2 , |
|
кі виражают с |
співвідношенн |
и |
|||||||||||||||||||||||
y |
a sin |
t |
|
|
i |
y |
2 |
a sin |
|
|
|
t |
, |
|
1 |
2 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
1 |
1 |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Епюри |
инал ни |
|
о |
ентів |
|
|
|
i |
|
2 від одинични |
сил |
|
|
|
1 i |
|
|
1, |
кі діют |
у |
||||||||||||||
|
|
M |
1 |
M |
P1 |
P2 |
||||||||||||||||||||||||||||
напр |
|
а |
ожливи |
пере |
і ен , |
по удовано відповідно на рис. |
|
. ,в і рис. . |
, . |
О числює о |
||||||||||||||||||||||||
пере |
і |
енн |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|

и теми і ома т пн ми ві но ті 15
|
M1M1 dx |
1 1 |
3 3 2 |
3 |
1 1 |
3 6 2 |
3 21 ; |
||
11 |
EI |
3EI |
2 |
3 |
|
EI |
2 |
3 |
EI |
|
|
||||||||
|
M1M2 dx |
1 1 |
3 3 2 |
3 |
1 1 |
3 6 2 |
6 39 ; |
||
12 |
EI |
3EI |
2 |
3 |
|
EI |
2 |
3 |
EI |
|
|
||||||||
|
22 |
M2M2 dx |
|
1 1 |
3 3 2 |
3 |
1 1 |
3 3 2 |
3 |
|||
|
|
EI |
|
|
3EI 2 |
3 |
|
3EI 2 |
3 |
|
||
|
|
|
|
|
|
|
||||||
|
1 |
1 |
6 |
6 |
2 |
6 |
78 . |
|
|
|
|
|
|
EI |
2 |
|
|
3 |
|
EI |
|
|
|
|
|
Отже, атриц податливості ає ви л д
B21 EI 39
EI 39 EI .
EI .
39 EI 78
EI 78 EI
EI
Підставивши пере і енн у рівн нн 16.39 і скоротивши на m EI одержи о
EI одержи о
63 a1 |
39a2 |
0; |
117a1 |
78 a2 |
(16.40) |
0, |
де по начено
EI |
EI |
. |
(16.41) |
m |
m 2 |
|
|
Прирівнює о до нул ви начник систе |
и рівн н |
. |
|
D |
63 |
39 |
0 , |
117 |
78 |
||
відки одержи о
63 78 117 39 0.
окривши дужки, дістане о квадратне рівн нн
2 141 351 0,
корені ко о становл т |
1 138,465 i 2 2,535. астоти віл ни коливан о числи о а |
допо о ою співвідношенн |
16.41): |

и теми |
і |
ома т пн ми ві но ті |
|
|
|
17 |
|||
ауважи о, |
о підстановка власни чисел |
до |
іншо о |
рівн нн |
при веде до ти |
са и |
|||
ре ул татів. |
|
|
|
|
|
|
|
|
|
нарешті перевіри |
о властивіст |
орто онал ності |
16.38 першо і дру о фор |
коливан |
|
||||
2 |
|
|
|
|
|
|
|
|
|
mj a j1a j2 |
3ma11a21 |
ma12a22 |
3m 0,517 |
0,645 |
1 1 |
0,0004 |
0. |
||
j1
16.2.4.икористання симетрі
|
си |
етрични |
систе а |
ожут |
виникнути |
к си етричні, так і о ерненоси етричні |
оловні |
|||||||||||||||
фор и коливан . |
і фор |
и |
ожут |
ути проаналі овано не алежно, оскіл ки |
а ал на |
атриц |
||||||||||||||||
систе |
и |
рівн н |
ро кладаєт с |
на |
дві під атриці нижчо о пор дку, |
одна |
|
ки |
відповідає |
|||||||||||||
си етрични , а інша |
ос ерненоси етрични |
пере і |
енн |
ас. |
|
л |
аналі у коливал но о |
|||||||||||||||
процесу таки |
систе |
ручно користуватис |
спосо о |
а іни систе |
и |
|
половиною. При ц о |
у |
||||||||||||||
систе |
а |
поділ єт с |
навпіл |
віссю |
си етрі . |
В |
ісц |
перері ів |
на |
одержані |
нові |
систе |
и |
|||||||||
накладают с |
додаткові |
в |
і |
а о |
додаткові |
у |
ови |
о відповідают |
пере |
і |
енн |
точок, |
||||||||||
ро ташовани |
на |
осі |
си |
етрі . |
і |
у ови повинні відповідати дефор овано |
у |
стану при |
||||||||||||||
си етрични |
і о ерненоси |
етрични |
коливанн |
. Отже, |
а іст |
ро ра унку си |
етрично |
систе |
и |
|||||||||||||
двічі ро ра овуют |
половинну систе |
у спершу |
на си етричні, а поті |
|
на о ерненоси |
етричні |
||||||||||||||||
коливанн . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
ак, си етрична ра а |
рис. |
. ,а |
ає шіст |
ступнів віл ності. При ро ра унку на си |
етричні |
|||||||||||||||||
коливанн |
вона |
а інюєт с |
половиною |
ра |
и |
рис. |
. , |
і половиною, |
о |
о ражена |
на |
|||||||||||
рис. |
. ,в, при ро ра унку на о ерненоси етричні коливанн . |
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
ис. . |
|
|
|
|
|
|
При си етрични коливанн |
точки, |
о ро ташовані на осі си |
етрі , |
ожут |
пере |
і |
уватис |
|||
лише в довж ціє |
осі. Причо у перері и, |
кі на ній ро ташовані, не |
ожут |
повертатис |
і пере і- |
|||||
уватис |
у напр |
і, перпендикул рно у до осі си етрі . При о ерненоси |
етрични коливанн |
|||||||
перері и, |
кі ро ташовані на осі си етрі , |
ожут повертатис |
і пере і уватис |
перпендикул рно |
||||||
до осі, проте не |
ожут пере і |
уватис |
в довж не . о у, |
к о стержен ро рі аєт с |
віссю |
|||||

|
и теми |
і |
ома |
т пн ми ві |
но ті |
18 |
|
си етрі , |
то при вивченні си етрични коливан |
в ра і потре и нео ідно ввести в |
у ви л ді |
||||
ру о |
о о |
атисненн , |
ке припускає поступал ні пере і енн в довж осі си етрі , |
а при аналі і |
|||
о ерненоси етрични |
коливан |
шарнірно-ру о у опору, ка виключає поперечні поступал ні |
|||||
пере |
і енн . |
|
|
|
|
|
|
|
|
|
|
|
|
ис. . |
|
|
|
|
|
а а на рис. |
. ,а |
ає а ало |
шіст |
ступнів віл ності. При аналі і си |
етрични коливан |
вона |
|||||
а інюєт с |
половиною ра |
и рис. . |
, , причо у стійка на осі си етрі |
вважаєт с а солютно |
|||||||
жорсткою. |
о у така ра а |
ає |
два |
ступн віл ності. |
е а на рис. |
. ,в |
астосуєт с |
дл |
|||
ро ра унку |
на |
о ерненоси |
етричні коливанн . Причо у |
жорсткіст |
стійки |
на вісі си |
етрі |
||||
ерет с в половинно |
у ро |
ірі. |
|
|
|
|
|
|
|
||
16.3. Змушені коливання
ушени и |
коливанн |
и |
систе |
и на иваєт с |
ру , |
кий |
уджуєт с та підтри уєт с |
||||||
овнішні |
и вплива и. |
підро д. . |
а началос , |
о алежно від |
арактеру |
овнішн о о впливу в |
|||||||
споруді |
ожут |
уджуватис |
|
рі ні дина ічні процеси. л |
систе |
одни |
ступне |
віл ності це |
|||||
питанн |
докладно ро |
л далос |
у л. |
|
. Аналі дина ічни систе |
кіл ко |
а ступн |
и віл ності |
|||||
|
|
|
|
|
|
|
|
|
|||||
покаже, |
о при |
ереженні |
|
а ал ни |
|
аконо ірностей тут ви вл ют с |
нові осо ливості, кі |
||||||
у овлені на вністю в систе |
і кіл ко |
ре онансни |
он. |
|
|
|
|
||||||
16.3.1. мушені коливання при гармонічному навантаженні
о |
л не |
о коливанн |
дефор івно систе |
и |
і скінчени |
число |
ступнів віл ності під дією |
|||||||||
овнішн о о |
навантаженн , |
інтенсивніст |
ко о |
|
інюєт с |
а |
ар |
онійни |
аконо . |
Післ |
||||||
акінченн |
пере ідно о |
процесу |
систе |
а |
вийде |
на |
режи |
усталени |
коливан . |
алі |
||||||
ро л дати ет с |
ви наченн |
усил |
та пере і |
ен , |
о у |
овлені са |
е ци режи |
о . |
|
|||||||
л |
аналі у |
ушени |
коливан |
систе |
и |
кіл ко |
а ступн |
и віл ності ро |
л не о нева о у |
|||||||
алку |
рис. |
. ,а , на кій ро ташовано n точкови |
ас і прикладено ві раційну у а ал нену силу |
|||||||||||||
P(t) P0sin t .
 2
2 

и теми |
і |
ома |
т пн ми ві |
но ті |
|
|
|
|
|
|
|
|
|
21 |
|||||||||||
исте |
а рівн н |
16.47 |
до вол є ви начати дефор |
ований стан систе |
и. Проте, |
дл аналі у |
|||||||||||||||||||
внутрішні |
усил |
доціл но перетворити |
адану систе у рівн н |
до іншо о ви л ду. |
|
||||||||||||||||||||
Під час |
ушени |
коливан на |
алку діют |
сили інерці |
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
F |
|
m y |
|
m 2 A sin t |
B sin t; |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
1 |
|
|
1 |
1 |
|
1 |
1 |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F |
|
|
m y |
2 |
m 2 A sin t |
B sin t; |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
2 |
|
|
2 |
|
2 |
|
2 |
|
|
2 |
|
|
|
|
|
|
|
(16.50) |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
F |
|
|
m y |
n |
m 2 A sin t |
B sin t. |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
n |
|
|
n |
|
n |
|
n |
|
|
n |
|
|
|
|
|
|
|
||
співвідношенн |
|
. |
чере |
|
B1, B2, , Bn |
по начено а |
плітудні величини сил інерці : |
||||||||||||||||||
|
|
|
B 1 |
m1A 1 |
2 , |
|
|
B 2 |
m 2 A 2 |
2 , , |
B n |
m n A n |
2. |
|
|
(16.51) |
|||||||||
відси а плітуди пере |
і |
ен |
виражают с |
співвідношенн |
и: |
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
A1 |
|
B |
|
2 , |
|
|
A 2 |
B |
2 , , |
A n |
B |
|
|
|
|
|
|
|||
|
|
|
|
|
|
m 1 |
|
|
m |
2 |
m n |
2 . |
|
|
|
(16.52) |
|||||||||
|
|
|
|
|
|
|
1 |
|
|
|
|
|
2 |
|
|
|
|
|
n |
|
|
|
|
|
|
Післ підстановки 16.46 і |
. |
|
|
та де ки |
нескладни |
перетворен |
систе |
а ал е ра чни |
|||||||||||||||||
рівн н |
16.47 на ере ви л ду |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
11 |
1 |
B1 |
|
12B2 |
|
|
|
|
|
1nBn |
|
|
|
1 p P0 |
0; |
|
|
||||||
|
|
m 2 |
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
21B1 |
|
|
22 |
|
1 |
|
B2 |
|
|
|
2nBn |
|
|
2 p P0 |
0; |
|
(16.53) |
||||||
|
|
|
|
|
m |
2 |
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
n1B1 |
|
|
|
n2B2 |
|
|
nn |
|
1 |
|
Bn |
|
np P0 |
0. |
|
|
|||||||
|
|
|
|
|
|
|
m 2 |
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
аки |
чино |
, одержано |
систе |
|
у лінійни |
ал е ра чни |
рівн н , |
ро в |
ок |
ко |
ви начит |
||||||||||||||
а плітудні величини сил інерці |
B1, B2 , , Bn . |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
А |
плітудні величини дина |
ічни |
усил у систе і |
ожут |
|
ути ви начені на |
а і принципу |
||||||||||||||||||
не алежності дій |
а фор ула |
и накладанн |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||

|
и теми |
і |
ома |
т пн ми ві |
|
но ті |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
22 |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
M |
|
|
|
|
|
|
|
|
|
|
|
pP0; |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
MiBi |
M |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
i |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
Q |
|
|
|
|
Bi |
|
|
|
pP0; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(16.54) |
|||||||
|
|
|
|
|
|
|
|
|
|
|
Qi |
Q |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
i |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
N |
|
|
|
|
|
|
|
|
pP0, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
Ni Bi |
|
N |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
i |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
де |
|
i , |
|
|
|
|
усилл від ді |
одинични сил інерці , |
|
|
p , |
|
p , |
|
p |
|
усилл , у овлені дією |
||||||||||||||||||||||||
|
Qi , |
|
|
Q |
|
||||||||||||||||||||||||||||||||||||
M |
Ni |
M |
N |
|
|||||||||||||||||||||||||||||||||||||
овнішн о о навантаженн |
P0 |
1. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
ео |
ідно чітко усвідо |
лювати, о одержано лише а |
|
плітудні величини внутрішні |
|
усил . |
||||||||||||||||||||||||||||||||||
процесі |
ар |
онічни |
коливан вони |
інювати ут с |
|
а |
|
ар |
онічни |
аконо , |
то то в |
уд - кий |
|||||||||||||||||||||||||||||
о ент часу дійсні усилл |
ви начают с |
співвідношенн |
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
M |
M sin t; |
Q |
|
Q sin t; |
|
N |
|
N sin t |
|
|
|
|
|
||||||||||||||||||||
і, отже, в процесі коливан |
ожут |
інювати величини і |
|
наки. |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
А плітуди пере і |
ен |
ожут |
ути ви начені |
|
а допо о ою фор ул |
16.52 |
а о а фор |
улою |
|||||||||||||||||||||||||||||||||
аксвелла- |
ора |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
Ai |
i |
|
|
MiM |
dx. |
|
|
|
|
|
|
|
|
|
|
(16.55) |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
EI |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
о у, |
к |
о |
епюру |
а плітудни |
инал ни |
|
|
о |
ентів |
|
M |
по удовано |
правил но, |
ає |
|||||||||||||||||||||||||||
справджуватис |
співвідношенн |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
Bi |
|
|
|
|
|
|
MiM |
dx. |
|
|
|
|
|
|
|
|
|
|
|
(16.56) |
||||||||||
|
|
|
|
|
|
|
|
|
|
m 2 |
|
|
|
|
|
|
EI |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Перевірка співвідношенн |
. |
до вол є контролювати по удову а плітудно епюри |
о |
ентів. |
|||||||||||||||||||||||||||||||||||||
16.3.2. Приклад розрахунку рами на змушені коливання |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
По удувати дина |
ічні епюри внутрішні |
усил у ра |
|
і |
рис. .11,а |
а таки ви ідни |
дани |
||||||||||||||||||||||||||||||||||
l=3 , h=3 |
, m1=m, m2=2m, P(t ) |
P0sin t , |
|
P0 |
10 |
|
, |
|
|
0,8 |
1, |
де |
1 |
частота основно о |
|||||||||||||||||||||||||||
тону віл ни |
коливан . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||

и теми |
і ома т пн ми ві но ті |
23 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ис. |
|
.11 |
|
|
|
|
|
|
|
|
|
|
|
о ра унок дано |
ра и |
|
на віл ні |
коливанн |
|
виконано у прикладі |
див.п. |
. . . |
к |
вже |
||||||||||||||||||||||
а началос , ра |
а |
ає два ступн |
|
віл ності. |
|
ожливі пере і |
енн |
осереджени |
ас пока ані на |
|||||||||||||||||||||||
рис. |
.11, . При ви наченні кіл кості ступнів віл ності вра овано, |
о |
y3 |
y1 . Ви начи |
о сили |
|||||||||||||||||||||||||||
інерці |
в напр |
а |
|
ожливи |
|
|
пере |
і |
ен . |
|
напр |
і y1 пере і |
уют с |
дві |
аси, то |
у перша сила |
||||||||||||||||
інерці |
є су |
ою |
дво |
сил |
|
F11, |
|
ка |
|
|
у |
|
овлена |
пере |
і енн |
|
|
аси |
m1 |
m , і |
сили F12, |
о |
||||||||||
спричинена пере |
і |
енн |
|
аси m2 |
2m . Отже, |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
B |
1 |
B |
11 |
B |
12 |
mA 2 |
2mA 2 |
3mA 2 . |
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
1 |
|
|
1 |
|
|
|
|
|
|
|||||
ру а сила інерці пов |
ана лише |
|
коливанн |
|
и |
аси m1, |
о ро ташована на консолі. |
о |
у |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
B |
|
mA 2 . |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
е у |
овнішні |
сил і сил інерці |
о ражено на рис. |
.11,в. |
|
|
|
|
|
|
|
|
|
||||||||||||||||||
апише |
о систе |
у рівн н |
16.53 |
дл ра |
и, |
о ро |
|
л даєт с |
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
11 |
|
|
|
1 |
|
B1 + 12B2 + 1p P0 =0; |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
3m 2 |
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
21B1 + |
|
22 |
|
|
1 |
|
B2 + 2 p P0 =0. |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
m 2 |
|
|
|
|
|
|
||||||||||||||
Підставивши у рівн нн |
одиничні пере |
і |
|
енн , о числені у прикладі п. |
. . і |
важаючи на те |
||||||||||||||||||||||||||
те, о в дано |
у випадку епюра |
|
|
|
|
|
|
і, отже, |
|
|
, а |
|
|
|
|
, а також |
о |
|
|
|||||||||||||
M |
|
p |
M |
2 |
|
2 p |
22 |
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1p |
|
12 |
|
|
|
|
|
|
|
||||


и теми |
|
і |
|
ома |
т пн ми ві |
но ті |
|
|
|
|
|
|
|
|
|
25 |
||||||||||
сил, коли |
овнішнє |
навантаженн , |
|
о діє |
на |
|
аси систе |
и, |
ро кладаєт с |
на ни ку інши |
||||||||||||||||
навантажен , |
кіл кіст |
ки |
дорівнює числу ступнів віл ності. |
о то о ж ставл т с |
додаткові |
|||||||||||||||||||||
у ови. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
По-перше, су |
а сил, |
кі діют |
на |
уд - |
ку |
асу в усі навантаженн , |
ає дорівнювати аданій |
|||||||||||||||||||
силі. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
По-дру е, сили, |
о діют |
на |
аси в кожно |
у навантаженні |
|
ают |
ути пропорційні сила |
|||||||||||||||||||
інерці |
FkT |
|
F1k |
F2k Fnk |
одніє |
|
оловни |
фор |
коливан , де ко |
поненти |
а начено о |
|||||||||||||||
вектора ви начают с |
а фор |
ула |
и |
16.31 . При тако |
у авантаженні коливанн від увати ут с |
|||||||||||||||||||||
а відповідною оловною фор |
ою. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
ійсно, |
пере |
і |
енн |
точок |
прикладанн |
сил інерці |
|
T |
|
|
|
|
|
|
від ді |
|||||||||||
|
k |
|
1k |
2k |
1k |
|||||||||||||||||||||
а плітудни сил інерці |
16.32) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
F1k |
|
m1a1k |
2 |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
F2k |
|
m2a2k |
2 |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
k |
|
|
2 |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
Fk |
|
|
|
|
|
|
2 |
M Vk |
k |
|
|
|
|
(16.57) |
||||
|
|
|
|
|
|
|
|
|
|
|
Fnk |
|
mnank |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
||||
ожут |
ути ви начені чере |
атрицю податливості |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
k |
BF |
|
BMV |
2 . |
|
|
|
|
|
|
(16.58) |
||||
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
|
k |
k |
|
|
|
|
|
|
|
|
|
|
іншо о |
оку, |
|
рівн нн |
16.26 |
|
ура уванн |
16.19 |
і |
16.27 |
ожна |
аписати дл |
оловно |
||||||||||||||
фор и коливан |
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
BMVk |
|
2 |
Vk , |
|
|
|
|
|
|
|
|
(16.59) |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
відки |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
BMV |
2 |
|
V . |
|
|
|
|
|
|
|
|
(16.60) |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
k |
|
k |
|
|
|
|
|
|
|
|
|
|
Порівн вши |
|
. |
і . |
, до оди |
о висновку: |
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
Vk |
|
k , |
|
|
|
|
|
|
|
|
|
|
(16.61) |
||
о й нео |
ідно |
уло довести. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Отже, |
а |
іст |
одно о дійсно о навантаженн |
|
вл ют с |
кіл ка інши |
навантажен , |
овнішні |
||||||||||||||||||
сили в |
ки |
пропорційні сила |
інерці |
оловни фор |
коливан . |
л |
кожно о |
таки навантажен |
||||||||||||||||||
систе |
а, |
о в дійсності |
ає n ступнів віл ності, |
коливати |
ет с |
|
однією, спіл ною дл |
всі |
ас |
|||||||||||||||||
частотою, |
то то |
уде поводитис |
к систе |
а |
одни |
ступне |
віл ності і |
оже ро ра овуватис |
||||||||||||||||||
відповідни |
и |
спосо а |
и, окре |
а |
етодо |
дина |
ічни |
коефіцієнтів. |
інцеві ре ул тати |
дл |
||||||||||||||||

и теми |
і |
ома |
т пн ми ві |
но ті |
|
|
26 |
||
ви ідно с е и |
ожут |
ути отри ані додаванн |
ре ул татів ро ра унків на кожне окре |
е наван- |
|||||
таженн . аки |
чино |
, ро ра унок систе и |
n ступн и |
віл ності оже |
ути ведений до |
||||
ро ра унку n систе |
одни |
ступне |
віл ності. |
|
|
|
|
||
о л не |
о нева о |
у алку, на кій ро ташовано n точкови |
ас. |
|
|
||||
Припусти |
о, |
о на кожну |
асу mi |
діє овнішнє дина ічне навантаженн Pi |
t (рис. |
.12,а). |
|||
|
|
|
|
|
|
ис. |
.12 |
|
|
|
|
а |
іни о а |
плітудні величини |
адани сил су |
а и n складови : |
|
||||||
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
Pi |
|
Pik . |
|
|
(16.62) |
|
|
|
|
|
|
|
k |
1 |
|
|
|
|
А плітуди сил прий е о пропорційни и до відповідни |
ас mi і а плітуд |
пере і ен |
|||||||||
оловно фор и. |
оді дл |
уд – |
ко |
оловній фор |
і коливан |
k (k=1,2,…,j,…,n): |
|
||||
|
|
|
|
|
Pik |
miaik Hk , |
|
|
(16.63) |
||
де Hk |
де ка, поки о невідо |
а константа, |
ка |
алежит від фор |
и коливан . |
|
|||||
ура уванн |
. |
а плітудна величина |
адано сили |
оже |
ути аписана у фор |
і |
|||||
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
Pi |
|
miaik Hk . |
|
|
(16.64) |
|
|
|
|
|
|
|
k 1 |
|
|
|
|
|
и теми |
|
і |
|
ома |
т пн ми ві |
но ті |
|
|
|
|
|
|
|
|
|
|
|
27 |
||||||||||
о |
л не |
о |
|
ожливу |
ро оту |
|
а |
плітудни |
|
величин |
прикладени |
сил |
на |
а |
плітудни |
|||||||||||||
пере і |
енн |
|
уд - ко |
оловно фор |
и коливан j. |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
n |
|
|
n |
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Pa |
|
a |
|
m a H |
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
i |
ij |
|
ij |
|
i |
ik |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
1 |
|
|
i 1 |
|
k 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
aij miai1H1 miai2H2 miaij H j |
miainH1n |
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
i |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
n |
|
|
|
|
|
|
n |
|
|
|
Hn |
n |
|
|
|
|
|
||
|
|
H1 |
|
miai1aij |
|
H2 |
miai2aij |
|
H j |
miaijaij |
miainaij. |
(16.65) |
||||||||||||||||
|
|
|
i |
1 |
|
|
|
|
i 1 |
|
|
|
|
|
|
i 1 |
|
|
|
|
|
|
i 1 |
|
|
|
|
|
а підставі властивості орто онал ності |
оловни |
фор |
коливан |
16.38 |
до оди |
о висновку, |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
о всі доданки у співвідношенн |
|
. |
, окрі |
H j |
mi aij aij , дорівнюют |
|
нулю. Отже |
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Pa |
H |
j |
m a2 , |
|
|
|
|
|
|
|
|
|
(16.66) |
|||
|
|
|
|
|
|
|
|
|
|
|
|
i |
ij |
|
i |
ij |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i 1 |
|
|
i |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
відки |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
Pa |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i ij |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
H j |
i 1 |
|
. |
|
|
|
|
|
|
|
|
|
|
(16.67) |
||
|
|
|
|
|
|
|
|
|
|
|
|
n |
m a2 |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i ij |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ор ула |
|
|
. |
дає |
о у о числювати |
коефіцієнт |
H j |
дл |
уд - |
ко |
оловно |
фор |
и |
|||||||||||||||
коливан |
і |
а |
допо |
о ою |
співвідношенн |
16.63 |
на одити |
відповідні |
дл |
а начено |
фор |
и |
||||||||||||||||
ко поненти |
овнішн о о навантаженн |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
Pij |
miaij H j . |
|
|
|
|
|
|
|
|
|
|
(16.68) |
||||
о |
л не |
о |
процедуру ро кладанн |
на прикладі нева о |
о |
алки |
тр о |
а точкови |
и |
аса |
и |
|||||||||||||||||
(рис. |
.13,а . |
о |
ас m1 i m2 прикладено ненул ові ві раційні сили |
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
P1 |
t |
P1sin t, |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
P2 |
t |
P2sin t. |
|
|
|
|
|
|
|
|
|
|
|
|
||
Покладати |
е |
о, |
о |
на |
асу |
|
m3 |
діє сила |
нул ово |
величини |
P3(t) |
|
0 , |
то то |
а |
плітуда |
||||||||||||
адано сили P3= 0. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
исте |
а |
ає три ступн |
віл ності. |
пектр власни |
частот |
істит |
три величини |
|
|
|
|
|||||||||||||||||


и теми |
і |
ома |
т пн ми ві |
|
но ті |
|
|
|
|
|
|
|
29 |
||
навантаженн |
нео ідно по удувати епюри внутрішні |
|
усил |
наприклад епюри M1,M 2 ,M3 і |
|||||||||||
ви начити дина ічні коефіцієнти дл |
відповідни |
оловни |
фор коливан . |
|
ак, у ра і |
ді |
|||||||||
ві раційно о навантаженн |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
1 |
2 , |
|
|
1 |
|
2 , |
|
|
1 |
|
|
, |
|
|
1 |
1 |
2 |
1 |
|
|
3 |
1 |
|
|
2 |
|
|||
|
|
1 |
|
2 |
|
|
3 |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
післ чо о а |
плітудні величини усил |
ожут |
ути о числені а фор |
ула и накладанн . |
ак, |
||||||||||
инал ні о |
енти ви начат с |
співвідношенн |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
M M1 1 |
|
M2 |
2 |
M3 3. |
|
|
|
|
|
|
||