

1-2 Моделирование / Matlab. Практический подход. Самоучитель
.pdfГлава 4. Элементы матричной алгебры
вительного в этом ничего нет, поскольку для любой квадратной матрицы ˆ
A
( |
|
) |
|
( |
|
) |
|
|
ˆ |
2 |
+ |
|
ˆ |
2 |
ˆ |
имеет место тождество sin(A) |
|
cos(A) |
|
= E. |
|||
На заметку
Операции SinM(A)^2 и CosM(A)^2 имеют смысл, поскольку SinM(A) и CosM(A) – квадратные матрицы, и к ним, как к обычным матрицам, применим оператор ^ возведения в целочисленную степень.
Результат вычислений показан в документе на рис. 4.25.
Рис. 4.25. Вычисление матричного синуса и косинуса
Справедливости ради следует отметить, что приведенный способ вычисления матричного синуса и косинуса далеко не единственный. Существуют и более простые пути. Например, можно воспользоваться формулой Эйлера для экспоненты в комплексной степени: exp(ix) = cos(x) + i sin(x), где i - мнимая единица, для которой по определению i2 = −1 . Таким образом, cos(x) = Re(exp(ix)) и sin(x) = Im(exp(ix)) . Здесь через Re(z)
и Im(z) обозначены соответственно действительная и мнимая части комплексного числа z . Мы могли бы, например, определить матричный синус
181

Самоучитель Matlab
как ˆ = ˆ , а матричный косинус как ˆ = ˆ . sin(A) Im(exp(iA)) cos(A) Re(exp(iA))
Примеры таких вычислений приведены ниже:
>>real(expm(A*i)) ans =
0.1750 -0.5752 -0.4314 -0.6878
>>imag(expm(A*i)) ans =
0.6878 -0.5752 -0.4314 -0.1750
Несложно заметить, что данный способ вычисления синуса и косинуса от матричного аргумента дает такой же результат (в пределах точности вычислений), что и с использованием ряда Тейлора.
На заметку
В вычислениях использовалась встроенная функция expm() для расчета матричной экспоненты. Она справляется с задачей, даже если аргумент комплексный. Действительная часть вычисляется с помощью функции real(), а мнимая – с помощью функции imag().
Окно с результатами вычислений показано на рис. 4.26.
Рис. 4.26. Альтернативный способ вычисления матричного синуса и косинуса
Как пример использования блочных матриц рассмотрим такую задачу. Предположим, есть три вектора в декартовом трехмерном пространстве
= ( , , ), индекс k = 1,2, 3 . Предполагаем также, что эти векторы ak ak1 ak2 ak 3
линейно-независимы и образуют базис. Задача состоит в том, чтобы разло-
жить по этому базису некоторый известный вектор b = (b1,b2,b3).
182

Глава 4. Элементы матричной алгебры
Выражение "разложить по базису" означает, что необходимо представить |
||||
|
|
|
|
|
вектор b |
в виде линейной комбинации векторов a1 |
, a2 |
и a3 |
. Другими сло- |
вами, необходимо найти такие числа x1 , x2 и x3 , чтобы имело место равен- |
||||||||||||||||||||||
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ство b = ∑xkak |
= x1a1 + x2a2 + x |
3a3 . Параметры x1 , x2 и x3 |
называются |
|||||||||||||||||||
|
|
|
|
k =1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
координатами вектора b в базисе из векторов a1 , a2 |
и a3 . Если компоненты |
|||||||||||||||||||||
x |
|
, x |
|
и x |
|
"спрятать" в вектор x |
= (x ,x |
|
,x |
|
), то для этого вектора долж- |
|||||||||||
|
1 |
|
2 |
|
3 |
|
|
|
|
|
ˆ |
1 |
2 |
|
3 |
|
|
|
|
ˆ |
|
|
но выполняться соотношение x A |
= b , где матрица A формируется век- |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
ˆ |
|
|
|
|
|
|
|
|||
торами a |
, a |
и a |
|
: первая строка матрицы A |
- это вектор a , вторая строка |
|||||||||||||||||
|
|
|
|
1 |
ˆ |
2 |
|
3 |
|
|
|
|
|
|
|
|
|
ˆ |
1 |
|
|
|
матрицы A |
- вектор a2 , а третья строка матрицы A |
- вектор a3 . Другими |
||||||||||||||||||||
|
|
|
|
|
ˆ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
словами, A - это блочная матрица. |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
, то чтобы его найти, необходимо в выражении |
||||||||||||
Что касается вектора x |
||||||||||||||||||||||
|
|
ˆ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ˆ−1 |
, обрат- |
x |
A |
= b правую и левую части умножить справа на матрицу A |
||||||||||||||||||||
|
|
|
|
|
|
|
ˆ |
|
|
|
|
|
|
|
|
ˆ−1 |
. Именно этим соотно- |
|||||
ную к матрице A. В результате получим x |
= b |
A |
|
|||||||||||||||||||
шением и воспользуемся для вычисления координат вектора в новом базисе. Рассмотрим приведенный ниже командный код (жирным шрифтом выделен ввод пользователя):
>>a1=[1 3 1];
>>a2=[-2 1 0];
>>a3=[0 -1 2];
>>b=[1 3 -2];
>>A=[a1;a2;a3]
A =
1 |
3 |
1 |
-2 |
1 |
0 |
0 |
-1 |
2 |
>> x=b/A x =
0.6250 -0.1875 -1.3125 >> x*A
ans =
13 -2
Сначала мы создаем три вектора для нового базиса (значения записываются в переменные a1, a2 и a3), а также вектор (переменная b), который необходимо разложить по базису. Командой A=[a1;a2;a3] на основе векторов нового базиса создается блочная матрица. С помощью этой матрицы, воспользовавшись командой x=b/A, вычисляем вектор координат вектора b в базисе векторов a1, a2 и a3. Проверить, корректно ли вычислен результат, можно, воспользовавшись командой x*A. В результате должны получить вектор b, что, собственно, и происходит (рис. 4.27).
183

Самоучитель Matlab
Рис. 4.27. Вычисление координат вектора в новом базисе
На заметку
Для умножения вектора b справа на обратную матрицу к A мы использовали оператор /. Хотя реальный алгоритм вычисления результата в этом случае на самом деле несколько сложнее, в принципе, можно полагать, что команда b/A вычисляется так: вектор b справа умножается на матрицу, которая обратна к матрице A.
Классической стала задача о вычислении угла между двумя векторами в пространстве. В Matlab эта задача решается исключительно просто. Рас-
смотрим один из возможных способов решения. Базируется он на том об- |
||||||||
|
|
|
|
|
|
|
|
|
щеизвестном факте, что скалярное a |
b произведение двух векторов a |
и b |
||||||
равно произведению модулей этих векторов на косинус угла |
ϕ между ними, |
|||||||
|
|
|
|
|
|
|
|
|
|
a |
b |
|
|||||
то есть a |
b |
=| a || b | cos(ϕ) . Отсюда легко найти cos(ϕ) = |
|
|
. Зная |
|||
|
|
|
|
|
| a || b | |
|
||
косинус угла, можно вычислить сам угол с помощью функции арккосинуса.
На заметку
В Matlab для вычисления арккосинуса имеется функция acos(). Однако здесь есть один специфический момент. Дело в том, что если известен косинус угла,
184
Глава 4. Элементы матричной алгебры
то сам угол восстанавливается неоднозначно. Арккосинус дет значение в пределах от 0 до p. Поэтому важно четко представлять, что же именно мы вычисляем. В данном случае вычисляется абсолютное значение угла между векторами – в плоскости векторов меньший из двух смежных углов между линиями, вдоль которых направлены векторы.
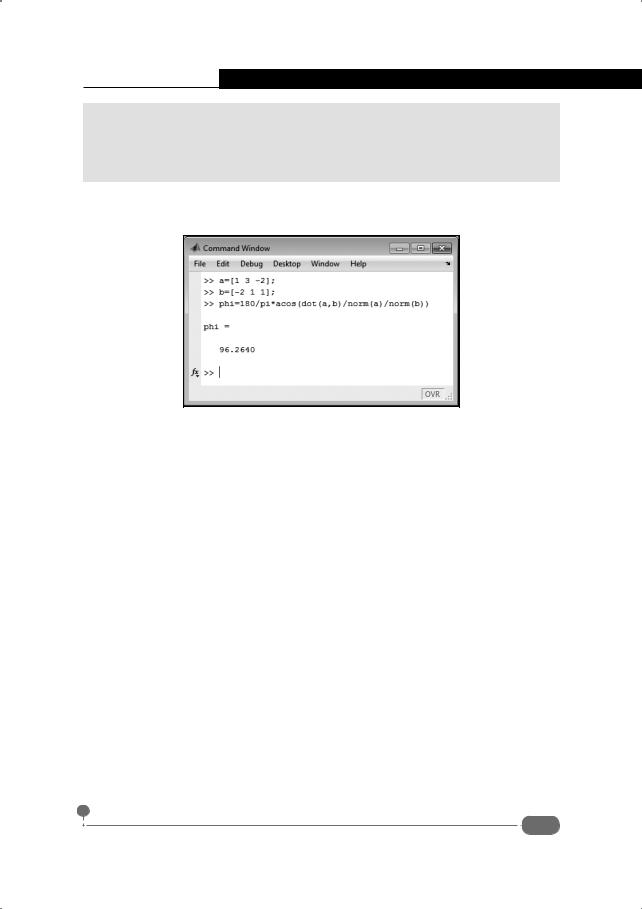
Пример вычисления угла между векторами представлен в документе на рис. 4.28.
Рис. 4.28. Вычисление угла между векторами
Собственно, для вычисления угла между векторами a и b, помимо команд инициализации векторов, используется всего одна команда phi=180/ pi*acos(dot(a,b)/norm(a)/norm(b)). Угол вычисляется в градусах, поэтому результат, возвращаемый арккосинусом, умножается на 180 и делится на π. Скалярное произведение векторов вычисляем с помощью функции dot(), а модуль вектора вычисляется функцией norm().
Похожая в известном смысле задача – вычисление площади и периметра пространственного треугольника. Задача формулируется так. Заданы три точки в пространстве. Они образуют треугольник. Необходимо найти площадь этого треугольника и его периметр.
Решать задачу будем следующим образом. Обозначим через A, B |
и C |
|||||||
|
|
|
|
|
|
|
|
|
точки, которые заданы. На их основе вычисляем три вектора AB |
, AC |
|||||||
|
|
|
|
|
|
|||
и BC . Периметр P может быть вычислен как сумма модулей этих векто- |
||||||||
|
|
|
|
|
|
|
|
|
ров, то есть |
P =| AB | + | AC | + | BC |. Площадь треугольника равна |
|||||||
|
1 |
|
|
|
|
|
||
S = |
|
|
|
| AB || AC | sin(ϕ), где через ϕ обозначен между векторами AB и |
||||
|
|
|
||||||
2 |
|
|
|
|
|
|||
AC . С другой стороны, если вычислить векторное произведение AB ×AC ,
то результатом будет вектор, и его модуль равен | AB || AC | sin(ϕ), то есть в два раза больше площади треугольника.
185
Самоучитель Matlab
На заметку
Если заданы начальная и конечная точка вектора, то координаты вектора можно рассчитать путем вычитания из координат конечной точки соответствующих координат начальной точки.
Ниже приведен командный код, с помощью которого вычисляется площадь и периметр треугольника (жирным шрифтом выделен ввод пользователя).
>>A=[1 2 1];
>>B=[-2 3 -1];
>>C=[1 -1 2];
>>AB=B-A
AB =
-3 1 -2 >> AC=C-A
AC =
0 -3 1 >> BC=C-B
BC =
3 -4 3
>>P=norm(AB)+norm(AC)+norm(BC)
P = 12.7349
>>S=norm(cross(AB,AC))/2
S=
5.3619
Командами A=[1 2 1], B=[-2 3 -1] и C=[1 -1 2] создаются точки – вершины треугольника. Затем с помощью команд AB=B-A, AC=C-A и BC=C-B вычисляются векторы, которые нам нужны для вычисления периметра и площади треугольника. Периметр вычисляем командой
P=norm(AB)+norm(AC)+norm(BC). Площадь вычисляем командой
S=norm(cross(AB,AC))/2, в которой для вычисления векторного произведения использована встроенная функция cross(). Результат вычислений показан на рис. 4.29.
Обращаем внимание, что точки представляются в виде списков из трех элементов. Это позволяет достаточно просто на основании известных точек вычислить соответствующие им векторы.
Еще одной классической является задача о решении системы линейных ал-
гебраических уравнений. В общем случае задача формулируется так. Не-
n
обходимо решить систему уравнений ∑aijxj = bi (индекс i = 1,2,...,n )
j =1
относительно неизвестных x1 , x2 , ..., xn при условии, что параметры aij
186

Глава 4. Элементы матричной алгебры
Рис. 4.29. Вычисление периметра и площади треугольника
и bi (индексы i, j = 1,2,...,n ) заданы. Именно этой задачей и займемся. Всякие экзотические случаи, наподобие системы без решений, исследовать не будем. Предполагаем, что у системы уравнений решение есть, и оно единственно.
Исходную систему уравнений удобно представить в матричном виде, вве-
|
|
|
ˆ |
|
|
|
(индексы i, j = 1,2,...,n ), |
|
дя в рассмотрение матрицу A с элементами a |
|
|
||||||
|
|
|
|
и |
ij |
|
соответственно (индекс |
|
векторы-столбцы b |
и x с элементами b |
x |
i |
|||||
|
|
|
i |
|
|
|
|
|
i = 1,2,...,n ). В этих обозначениях система уравнений может быть записа- |
||||||||
ˆ |
|
|
|
|
|
|
|
−1 |
|
|
|
|
|
|
|
ˆ |
|
на в виде Ax |
= b . Решение находится элементарно: x = A b . Таким обра- |
|||||||
зом, для решения системы уравнений достаточно знать матрицу коэффици-
ˆ
ентов A и вектор правых частей уравнений b . Данный подход реализован в коде, представленном ниже:
187

Самоучитель Matlab
>> A=[1 2 3;-1 1 2;1 -2 5]
A =
1 2 3 -1 1 2 1 -2 5
>>b=[10;1;4]
b =
10
1
4
>>x=A\b
x =
3
2
1
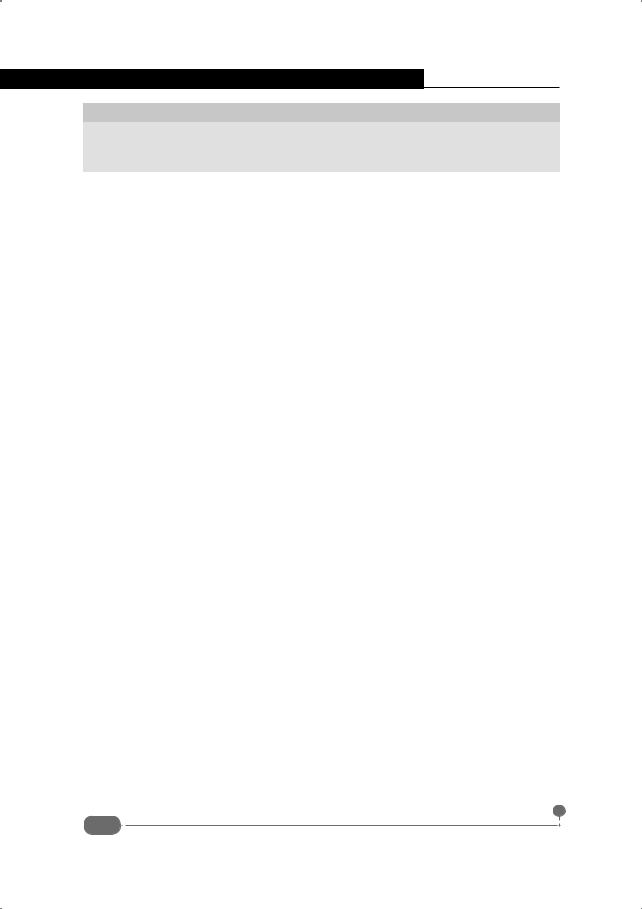
Матрица коэффициентов задается командой A=[1 2 3;-1 1 2;1 -2 5]. Вектор коэффициентов правых частей задается командой b=[10;1;4]. Таким образом, решается следующая система уравнений:
|
x1 |
+ 2x2 |
+ 3x3 = 10 |
|||||
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
+ x |
|
+ 2x |
|
= |
1 |
−x |
1 |
2 |
3 |
|||||
|
|
|
|
|
|
|||
|
x |
|
−2x |
|
+ 5x |
|
= |
4 |
|
1 |
2 |
3 |
|||||
|
|
|
|
|
|
|||
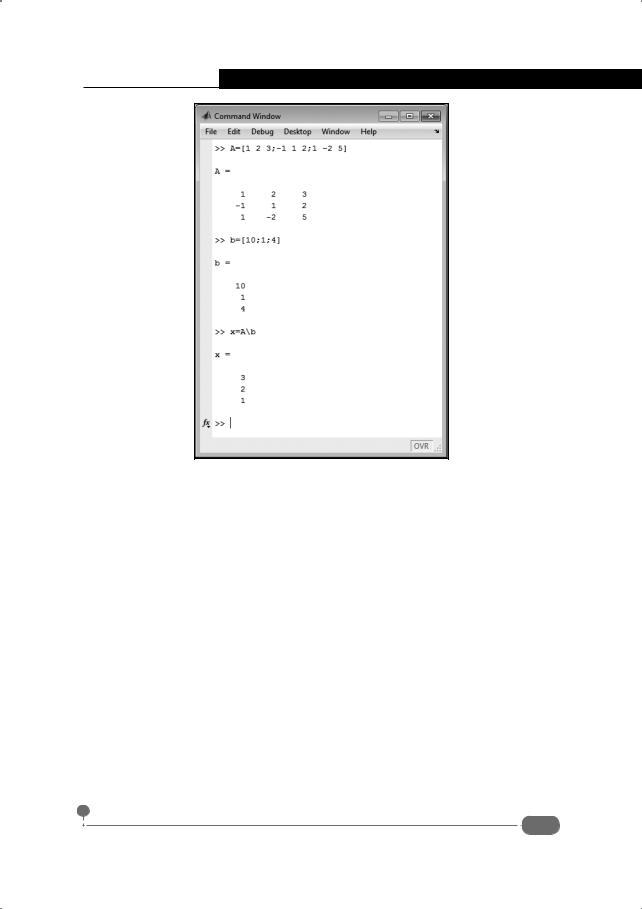
Система имеет единственное решение x1 = 3 , x2 = 2 и x3 = 1. Именно его попытаемся найти. Для этого используем команду x=A\b, в результате чего
иполучаем нужное решение (рис. 4.30).
На заметку
Вместо вычисления обратной матрицы к матрице A и умножения ее (слева) на вектор b мы использовали оператор \.
Важная задача, которая встречается достаточно часто, связана с диагонализацией матриц. Вначале краткая предыстория о том, откуда такая задача
вообще может возникнуть. Допустим, мы вместо одного векторного базиса
вводим другой. Единичные орты исходного базиса обозначим как a1 , a2 и a3 .
На заметку
Далее, если явно не указано, подразумевается, что речь идет о векторахстолбцах, а все матрицы квадратные размера 3×3 (хотя изложенное далее без особых проблем применимо и к более общему случаю квадратных матриц произвольного размера).
Они |
|
единичные и ортогональные, то есть скалярное произведение |
||
|
|
|
= δ |
(индексы i, j = 1,2, 3 ). Здесь штрих обозначает транспониро- |
a′ a |
j |
|||
i |
|
ij |
||
188
Глава 4. Элементы матричной алгебры
Рис. 4.30. Решение системы линейных уравнений
|
|
|
= j |
|
|
|
|
|
|
|
|
1,i |
|
|
|
|
|
|
|
||
вание, а через δ |
|
|
|
|
обозначен символ Кронекера. Орты в новом |
|||||
= |
0,i ≠ j |
|||||||||
ij |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
базисе обозначим как b |
, b |
и b |
. Они также ортогональные и единичные, |
|||||||
|
|
1 |
2 |
|
3 |
|
|
= δ |
(индексы i, j = 1,2, 3 ). Никто |
|
то есть имеет место соотношение b |
′ b |
j |
||||||||
|
|
|
|
|
|
i |
|
ij |
|
|
и ничто не запрещают нам записать новые орты через старые орты. Это бу-
|
3 |
|
|
дет выглядеть так: bi |
= ∑sijaj (индекс i = 1,2, 3 ). Элементы sij с индекса- |
||
|
j =1 |
ˆ |
, которая называется матрицей пере- |
|
|
||
ми i, j = 1,2, 3 формируют матрицу S |
|||
хода. У этой матрицы есть ряд интересных свойств. Так, несложно показать, что для матрицы перехода Sˆ′ = Sˆ−1 - то есть транспонированная матрица
равна обратной. Определитель матрицы ˆ (по модулю) равен единице. Для
S
преобразования базиса достаточно задать матрицу перехода ˆ. Все необ-
S
ходимые преобразования вычисляются на основе этой матрицы. Так, если
в старом базисе задан некоторый вектор x , то в новом базисе получим век-
= ˆ
тор y Sx. Это следует непосредственно из способа определения матрицы перехода.
189

Самоучитель Matlab
На заметку
При преобразовании базиса модуль вектора не меняется. В старом бази- |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
се модуль вектора вычисляется как x |
′ x , а в новом базисе это y′ |
y , где |
|||||||||
|
|
|
|
|
ˆ |
|
|
|
|
|
|
по определению y |
= Sx. Поскольку в обоих случаях должны получить одно |
||||||||||
|
|
|
|
|
|
|
|
|
|
ˆ |
|
и то же значение, а также принимая во внимание, что y |
′ = x |
′S′, получаем |
|||||||||
|
|
|
ˆ ˆ |
|
|
|
|
|
|
ˆ |
|
y |
′ y |
= x |
′S′Sx = |
x |
′ x. Отсюда, собственно, и находим, что (через E обозна- |
||||||
|
|
|
|
|
ˆ ˆ |
ˆ |
ˆ |
ˆ−1 |
. |
|
|
чена единичная матрица) S′S |
= E и, следовательно, S′ = |
S |
|
|
|||||||
Если в старом базисе задана некоторая матрица ˆ, то в новом базисе эта
A
матрица вычисляется как ˆ = ˆˆ ˆ−1.
B SAS
На заметку
Данное правило можно получить исходя из того обстоятельства, что для лю- |
||||
ˆ |
|
|
′ |
ˆ |
бой матрицы A и вектора x |
|
|
||
выражение x Ax является скаляром и не зави- |
||||
сит от выбора векторного базиса. Поэтому должно выполняться соотношение |
||||||||
ˆ |
ˆ |
|
|
|
ˆ |
ˆ ˆ ˆ |
ˆ |
−1 |
x′Ax = y′By |
= x |
′S′BSx |
, что дает A = S′BS |
или B |
= SAS . |
|||
Очень часто задача состоит в том, чтобы выполнить преобразование базиса,
при котором некоторая матрица (например, ˆ) принимает наиболее про-
A
стой вид. А что может быть проще диагональной матрицы? Другими словами, задача может быть сформулирована, например, следующим образом.
Задана симметричная матрица ˆ. Необходимо найти матрицу перехода ˆ
A S
такую, чтобы матрица ˆ = ˆˆ ˆ−1 была диагональной.
B SAS
На заметку
К диагональному виду матрицу ˆ можно привести, если все ее собственные
A
числа различны. В противном случае удается свести матрицу к жорданову виду, когда матрица "почти диагональная". Более того, матрица перехода будет удо-
ˆ |
ˆ−1 |
ˆ |
влетворять условию S′ = S |
, только если матрица A симметрична. Другими |
|
|
|
ˆ |
словами, если речь идет не просто о матрице S , а именно о матрице перехо- |
||
ˆ |
|
ˆ |
да S , то свести к диагональному виду можно только симметричную матрицу A
сразными собственными числами.
ВMatlab есть несколько встроенных функций, с помощью которых может решаться описанная выше задача (или идейно близкая к ней). Здесь остановимся на уже известной функции вычисления собственных чисел eig() и функции выполнения жорданова преобразования jordan(). Функция eig() уже описывалась. Что касается функции jordan(), то ее аргументом указывается исходная, преобразуемая, матрица. В качестве результата возвращается две матрицы. Первая матрица – это матрица, с помощью которой выполняется преобразование (аналог матрицы перехода, но только аналог!). Вторая матрица - диагональная или "почти диагональная" (жор-
190