

W( j ) |
K |
|
|
|
|
K |
|
|
(1 jT ) |
|
K j KT |
|
||
1 T j |
|
|
(1 jT ) |
|
(1 jT ) |
1 2T2 |
||||||||
|
|
K |
j |
|
|
KT |
U( ) jV( ). |
(2.35) |
||||||
|
|
1 2T2 |
||||||||||||
1 2T2 |
|
|
|
|
|
|
|
|
||||||
2.6. Линейные непрерывные модели вход-состояние-выход
В этом подразделе рассматриваются непрерывные линейные модели, описывающие связи входов и выходов управляемого объекта (динамической системы) в виде системы дифференциальных уравне-
ний 1-го порядка (системы в нормальной форме Коши) с использова- |
|
нием промежуточных переменных – |
И |
переменных состояния. Эти |
|
уравнения получаются путём введения в исходное уравнение системы новых переменных xi(t) вместо (i–1) производных выходной величины y(t). Такой способ описания является ключевой особенностью
метода пространства состояний.
x (t) y(i 1) |
(t), |
i 1,2...n. |
(2.36) |
i |
|
Д |
|
|
|
|
|
Пространство состояний динамической системы – n-мерное |
|||
пространство, каждой точке которого однозначно соответствует оп- |
|
|
А |
б |
|
и |
|
ределённое состоян е рассматриваемой динамической системы в не-
которых обобщённыхСкоорд натах. Каждому процессу изменения со-
стояния системы (её дв жен ю в этих координатах) соответствует определённая траектория перемещения изображающей точки в пространстве.
Переменными состояния неуправляемой динамической системы (системы без входных воздействий) с выходом y называются независимые переменные xi(t) такие, что значение выходной переменной y(t) в произвольный момент времени t = t1 > t0 однозначно определяется числами xi0 = xi(t0).
Связь между входным воздействием управляемой динамической системы и ее выходной переменной неоднозначна, т. е. одному и тому же входному сигналу u(t) может соответствовать множество выходных сигналов y(t). Введение в рассмотрение переменных состояния xi позволяет устранить указанную неоднозначность – выход системы в произвольный момент времени t1 > t0 единственным образом опреде-
24

ляется начальными значениями переменных состояния xi0 и заданным на интервале времени [t0; t1] входным воздействием u = u[t0; t1].
В пространстве состояний многомерная динамическая система (рис. 2.3) в общем виде характеризуется:
вектором переменных состояния
x x1,x2 ... |
xn T , |
(2.37) |
вектором входных (управляющих) воздействий |
|
|
u u1,u2 ... |
um T , |
(2.38) |
вектором возмущающих воздействий |
|
|
|
|
|
|
f f1,f2 |
... |
fl T , |
(2.39) |
|||||||||
вектором выходных переменных |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
y y1, y2 |
... |
yk |
T . |
(2.40) |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
И |
|
|
||
|
|
|
|
|
|
|
|
|
Д |
|
|
|||||
|
|
|
|
|
|
|
f |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
||||||
|
u |
|
|
|
|
|
|
|
|
|
|
x |
|
|
y |
|
|
|
Динамическая |
||||||||||||||
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
А |
|
|
|
|
|
||||||
|
|
|
|
с стема |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
б |
|
|
|
|
|
|
|
|
|
|
||
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
||
РисС. 2.3. труктурная схема модели управляемой динамической системы с переменными состояния
Величины вектора x образуют минимальную совокупность координат, задание которых полностью определяет текущее состояние системы. Состояние системы может быть отождествлено с положением изображающей точки в n-мерном пространстве.
В общем случае линейная управляемая динамическая система с m входами, l возмущениями, k выходами и n переменными состояния описывается системой линейных дифференциальных уравнений состояния и выхода 1-го порядка в форме Коши:
25
x1 a11x1 a12x2 ... a1nxn b11u b12u ... b1mu q11 f ... q1l f ;x2 a21x1 a22x2 ... a2nxn b21u b22u ... b2mu q21 f ... q2l f ;
...
xn an1x1 an2x2 ... annxn bn1u bn2u ... bnmu qn1y1 c11x1 c12x2 ... c1nxn d11u d12u ... d1mu;
y2 c21x1 c22x2 ... c2nxn d21u d22u ... d2mu;
...
yk ck1x1 ck2x2 ... cknxn dk1u dk2u ... dkmu.
Систему уравнений (2.41) можно представить делью вход-состояние-выход линейной системы
f ... qnl f ;(2.41)
матричной мо-
|
|
x Ax Bu Qf; |
(2.42) |
|
|
y Cx Du, |
|
где А – матрица состояния размерности пхп, В – матрица управле-
ния размерности пхт, Q – матрица возмущения размерности nхl, С |
||
– |
|
А |
матрица выхода размерности кхп, D –Иматрица прямой связи |
||
размерности кхm. |
б |
|
|
Для построения структурной схемыД, соответствующей модели |
|
вход-состояние-выход, запишем уравнения (2.42) в операторной форме и выразим выходную величину y
Эквивалентнаяиструктурная pсхема матричной модели системы
y C |
Ax Bu Qf |
Du, |
(2.43) |
|
|||
С |
|
|
|
изображена на рис. 2.4, где x0 – начальные значения переменных состояния.
Если матрица Q или D является нулевой, это означает, что в системе нет возмущений или явной прямой связи.
Для невозмущенной системы без прямой связи с одним входом m = 1, одним выходом k =1 и n переменными состояния матрицы А, В, С, D, Q имеют вид
a11
A a21
an1
a12 |
... |
a1n |
|
||
a |
... |
a |
|
|
,B |
22 |
|
|
2n |
||
|
|
|
|
||
an2 |
... |
|
|
|
|
ann |
|
||||
b1 |
|
|
|
|
|
|
|
|
|
|
b |
|
,С c |
c |
|
c |
|
,D 0 |
,Q 0 |
.(2.44) |
|
|
2 |
|
|
n |
||||||
|
|
|
1 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
bn |
|
|
|
|
|
|
|
|
|
|
26
f
|
|
|
|
|
|
(Q) |
|
|
|
|
x0 |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
u |
|
|
|
+ |
+ |
x |
1 |
|
|
x |
|
|
y |
||||
|
|
(B) |
|
|
|
|
(C) |
|
|||||||||
|
|
|
|
|
+ |
|
|
|
|
p |
|
|
|
+ + |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(A) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
(D) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|||||||||||
|
|
Рис. 2.4. Структурная схема матричной модели системы, |
|||||||||||||||
|
|
|
|
описанной в виде переменных состояния |
|||||||||||||
|
Первоначальная модель вход-состояние-выход может быть пре- |
||||||||||||||||
образована, причиной чему обычно является изменения базиса (координат состояния) пространства состояний. При замене вектора состояния х другим вектором z, связанным со старым линейным невы-
рожденным преобразованием |
|
|
И |
|
||
|
|
|
z = Px, |
|
(2.45) |
|
где Р – матрица преобразования, размерностиД nхn, причем матрица |
||||||
преобразования не должна |
ыть вырожденной, т. е. det P ≠ 0. |
|
||||
Тогда матричная модель одноканальной невозмущенной систе- |
||||||
|
|
|
А |
|
|
|
мы без прямой связи зменяется и принимает вид |
|
|||||
|
б |
|
|
|
||
|
|
|
|
|
|
|
|
|
z Az Bu; |
|
(2.46) |
||
|
|
|
|
|
|
|
|
|
y Cz, |
|
|
|
|
и |
|
|
|
|
||
где матрицы преобразованной модели находятся как |
|
|||||
С |
|
A PAP 1; |
|
|
||
|
|
|
|
|
(2.47) |
|
|
|
B PB; |
|
|
||
C CP 1.
При этом исходное пространство состояний заменяется пространством состояний той же размерности. Введение новых коорди-
нат состояния приводит к эквивалентному преобразованию модели вход-состояние-выход. Выходной сигнал системы y как и структурная схема модели при переходе от одних координат состояния к другим при одинаковых управляющих воздействиях u остается неизменным.
27
Для примера представления моделей вход-состояние-выход рассмотрим модель одноканальной невозмущенной системы, описываемой дифференциальным уравнением 2-го порядка:
|
|
(2.48) |
y |
a1y a2 y bu |
где u – входное воздействие, y – входное воздействие, ai, b – постоянные коэффициенты модели.
Используя формулу (2.36), определим переменные состояния модели системы, заменив (n–1) производные выходной величины y(i–1) новыми переменными xi:
|
|
|
|
x1 y, |
|
|
|
(2.49) |
|||
|
|
|
|
|
x2 y. |
||||||
Найдем производные переменных состояния: |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
(2.50) |
|
|
|
|
|
|
x1 y x2; |
|
|||||
|
|
|
|
|
|
|
|
|
|
(2.51) |
|
x2 |
y bu a1y a2 y bu a1x2 a2x1. |
||||||||||
Тогда модель вход-состояние-выход системы в форме Коши со- |
|||||||||||
гласно уравнению (2.41) будет иметь вид |
И |
|
|||||||||
|
|
|
|
|
|
А |
|
||||
|
|
x1 |
x2; |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
a1x2 |
bu; |
(2.52) |
|
|
x2 a2x1 |
|
||||||||
|
|
|
б |
|
Д |
|
|||||
|
|
y |
x . |
|
|
|
|||||
|
|
|
|
|
1 |
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|||
Из (2.52) получим матричную модель вход-состояние-выход: |
|||||||||||
|
|
|
|
|
0 |
|
|
1 |
0 |
|
|
С |
|
|
|
|
|
|
|
x u; |
|
||
|
x |
|
|
|
|
(2.53) |
|||||
|
|
|
|
a2 |
a1 |
b |
|||||
|
y |
1 |
|
0 |
x. |
|
|
|
|||
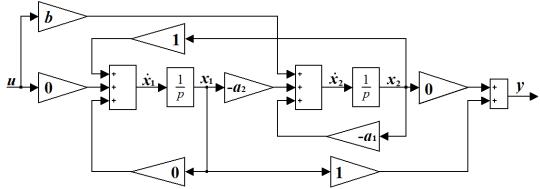
Структурная математическая схема модели системы (2.52), описанной в виде переменных состояния, представлена на рис. 2.5.
Рис. 2.5. Структурная схема математической модели системы
28
Для примера эквивалентного преобразования моделей вход- состояние-выход рассмотрим модель одноканальной невозмущенной системы, описываемой системой линейных дифференциальных уравнений состояния и выхода 1-го порядка в форме Коши:
|
|
x1 u; |
|
|
x1 |
|
|||
|
|
2x2 x3 |
5u; |
|
x2 |
||||
|
|
|
|
(2.54) |
x3 |
4x1 x2 4x3; |
|||
y 2x |
x . |
|
||
|
|
2 |
3 |
|
Матричная модель вход-состояние-выход системы из (2.54):
|
|
1 0 |
0 |
|
1 |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
0 |
2 |
1 x |
|
И |
|
|||||
|
5 |
u; |
(2.55) |
|||||||||
|
|
|
4 |
1 |
|
|
|
|
0 |
|
||
|
|
|
4 |
|
|
|
|
|||||
|
|
|
0 2 |
|
1 x. |
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
||||
|
Матрица преобразования Р имеет вид |
|
|
|
||||||||
|
|
|
|
А |
|
|
|
|
|
|||
|
|
|
|
|
1 |
3 |
0 |
|
|
|
|
|
|
|
б |
|
|
|
|
|
|
|
|||
|
|
|
P |
|
6 |
0 |
|
|
|
|
(2.56) |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
и |
5 |
1 |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Проведем экв валентное |
преобразование модели |
вход- |
|||||||||
С |
спользуя формулу (2.47). |
|
||||||||||
состояние-выход (2.55), |
|
|||||||||||
Расчет матр ц преобразованной модели можно провести в программе MS Excel посредством ввода в свободные ячейки следующих функций:
(A) "=МУМНОЖ(МУМНОЖ(A16:C18;A3:C5);(МОБР(A16:C18)))"
(B) "=МУМНОЖ(A16:C18;A8:A10)"
(C) "=МУМНОЖ(A13:C13;МОБР(A16:C18))"
где исходные матрицы заранее задаются в ячейках листа:
(А) = {A3:C5}, (B) = {A8:A10}, (C) = {A13:C13}, (P) = {A16:C18}.
После ввода функций, массив данных хранится в одной ячейке, чтобы вывести полную матрицу необходимо выделить нужный диапазон ячеек вместе с введенной функцией (размер преобразованной матрицы определяется по размеру исходной), нажать F2, а затем
Ctrl+Shift+Enter.
29