

jV( )
А
-1 |
0 |
Δφ |
U( ) |
|
ω |
|
И |
|
Д |
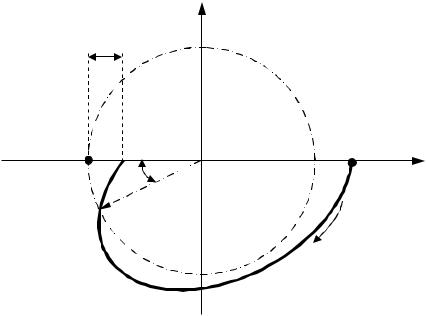
Рис. 3.7. Определение запасов устойчивости |
|
по амплитудно-фазовой частотной характеристике |
|
Таким образом, представленные критерии позволяют проводить |
|
б |
|
сти системы. А При проект рован АСР рекомендуется обеспечить следую-
анализ устойчивости линейных систем. Устойчивость АСР является
необходимым, но не достаточным условием практической пригодно-
щие запасы устойч вости: L 6дБ и 30 .
Одним изСважнейших д намических свойств АСР является ее поведение в переходном режиме при изменении внешних управляющих или возмущающих воздействий. В связи с этим существенным требованием для А Р является качество переходных процессов, которое оценивается показателями качества.
3.9. Управляемость и наблюдаемость линейных систем
При анализе линейных систем одним из важнейших свойств, наряду с устойчивостью и качеством регулирования, является управ-
ляемость и наблюдаемость системы.
Понятия управляемости и наблюдаемости важны, например, тогда, когда алгоритм управления формируется не в зависимости от ошибки регулирования системы (см. п. 1.2), а в функции переменных состояния (см. п. 2.6):
72
x x1, x2 ... xn T . (3.33)
Таким образом, управляемость и наблюдаемость – это свойство не физического объекта (или системы), а его математической модели в виде уравнений состояния (2.41 или 2.42).
Управляемость системы – свойство системы управления и объекта управления, описывающее возможность перевести систему из одного состояния в другое. Исследование системы управления на управляемость является одним из важных шагов в синтезе управляющих контроллеров.
Система называется полностью управляемой, если существует такое управляющее воздействие u(t), которое переводит её из любого начального состояния x(t0) в одно единственное заданное конечное состояние x(tK) за конечный интервал времени (t0 – tK). Очевидно, чтобы осуществить такой перевод, управляющее воздействие u(t) должно прямо или косвенно влиять на все переменные состояния xi(t).
Для оценки управляемости и наблюдаемости линейных систем,
описанных в пространстве состояний, существуют критерии, разрабо- |
|||
танные профессором Р. Калманом. |
И |
||
|
|||
Пусть существует система n-го порядка (с n компонентами век- |
|||
тора состояния), m входами и k выходамиД, которая описана перемен- |
|||
ными состояния в матричном виде |
|
||
|
|
А |
|
|
x Ax Bu; |
(3.34) |
|
|
y Cx Du. |
||
|
|
||
|
|
|
|
|
б |
|
|
и |
|
|
|
С |
|
|
|
Формулировка кр тер я управляемости Калмана
Система является полностью управляемой, если матрица
управляемости KУ является невырожденной, т. е. ранг матрицы управляемости равен n.
Матрица управляемости KУ составляется из матрицы состояния
А размерности пхп и матрицы управления В размерности пхт:
KУ B,AB,A2B,...,An 1B . |
(3.35) |
Системы, в которых матрица управления В = 0, с очевидностью являются неуправляемыми, так как воздействие u(t) не оказывает никакого влияния на управляемую величину y(t). В более общем случае основная модель объекта может быть представлена в виде двух подсистем, на одну из которых не поступает управление, что свидетельствует о частичной управляемости системы.
73
Наблюдаемость системы – свойство системы управления и объекта управления, позволяющее по выходу системы судить о процессах, происходящих внутри неё. Ввиду того, что состояния системы играют важную роль в управлении с помощью обратных связей, важно, чтобы они были наблюдаемыми.
Система называется полностью наблюдаемой, если по выходу системы y(tK) в конце интервала времени (t0 – tK) при известном управляющем воздействии u(t) можно определить все единственные начальные компоненты вектора состояния x(t0), т. е. все переменные состояния системы xi(t) входят в выражение для управляемой величи-
ны y(t).
Соответственно наблюдаемыми состояниями системы xi(t) являются те компоненты вектора состояния x, которые можно восстановить по условиям, приведённым выше.
Формулировка критерия наблюдаемости Калмана
Система является полностью наблюдаемой, если матрица на-
блюдаемости KН является невырожденной, т. е. ранг матрицы на- |
||||||
блюдаемости равен n. |
|
|
|
|
И |
|
|
|
|
|
|
|
|
Матрица наблюдаемости KН составляется из матрицы состояния |
||||||
|
|
|
Д |
кхп: |
||
А размерности пхп и матрицы выхода |
С размерности |
|||||
|
|
|
C |
|
|
|
|
|
А |
|
|
||
|
|
|
CA |
|
||
|
|
|
|
|
|
|
б |
|
2 |
. |
(3.36) |
||
K |
|
|
CA |
|||
и |
Н |
|
... |
|
|
|
|
|
|
|
|||
|
|
|
|
n 1 |
|
|
|
|
CA |
|
|
|
|
Система,Сдля которой матрица выхода С = 0, с очевидностью
является ненаблюдаемой, так как переменные состояния не оказывают влияния на управляемую величину y(t). В более общем случае система может быть представлена в виде двух подсистем, одна из которых не влияет на выходную переменную, и поэтому ее переменные состояния не могут быть восстановлены, а система в целом является лишь частично (не полностью) наблюдаемой.
Для примера анализа управляемости рассмотрим систему, структурная схема модели которой представлена на рис. 3.8.
74

|
|
u |
|
1 T1 p |
|
|
1 |
|
у |
|
||
|
|
|
|
1 T2 p |
|
|
1 T3 p |
|
|
|||
|
Рис. 3.8. Структурная схема модели системы |
|
||||||||||
Систему описывает дифференциальное уравнение в оператор- |
||||||||||||
ной форме |
|
|
|
|
|
|
|
|
|
|
|
|
|
T T p2 y T p y T p y y T p u u. |
(3.37) |
||||||||||
|
2 |
3 |
|
|
2 |
|
3 |
|
|
1 |
|
|
При использовании канонической формы уравнения состояния |
||||||||||||
принимают вид |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
x |
1 |
u; |
|
|
|
|
|
|
|
x |
|
T |
|
|
|
||||
|
|
|
1 |
|
T |
1 |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
2 |
|
|
|
|
|
|
|
|
|
|
1 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
u; |
|
. |
(3.38) |
|||
|
|
|
x2 |
|
x2 |
|
||||||
|
|
|
|
|
T |
|
T |
|
|
И |
|
|
|
|
|
|
3 |
|
3 |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
T2 T1 |
x |
T3 T1 |
x . |
|
||||
|
|
|
y |
|
||||||||
|
|
|
|
|
T T |
1 |
|
T T |
2 |
|
||
|
|
|
|
2 |
3 |
|
|
3 |
2 |
|
|
|
|
|
|
|
|
|
|
|
Д |
|
|
||
Структурная схема, соответствующая уравнениям (3.38), изо- |
||||||||||||
бражена на рис. 3.9. |
|
|
|
А |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
б1 |
|
T T |
|
|
|||
|
|
|
|
1 T2 p |
х1 |
|
2 |
1 |
|
|
||
|
|
|
T2 |
|
|
T2 T3 |
+ |
|
||||
u |
|
|
и |
|
|
|
|
|
|
|||
С |
|
|
|
|
|
|
|
у |
|
|||
|
|
1 |
|
х2 |
|
T3 T1 |
+ |
|
||||
|
|
|
|
|
|
|||||||
|
|
|
T |
1 T p |
|
|
T3 T2 |
|
|
|||
|
|
|
3 |
|
3 |
|
|
|
|
|
|
|
Рис. 3.9. Структурная схема модели состояний
При равенстве постоянных времени T3 и T1 переменная х2 не участвует в формировании управляемой величины y(t), т. е. система становится частично наблюдаемой. Свойство наблюдаемости также связано с вопросом сократимости (вырожденности) передаточной функции системы, на схемах видно, что при равенстве постоянных времени T3 и T1 передаточная функция системы сокращается.
75