

Подставив сюда Кб = 8 и φ заб = 0,1, получим выражение для момента трения Мт = 0,7∙ GK∙ rК. Это очень высокое внутреннее трение и его может обеспечить только дифференциал специальной конструкции (самоблокирующийся), например червячный.
Несмотря на лучшую проходимость автомобиля с дифференциалом повышенного трения, имеются существенные недостатки:
-из-за потерь на трение падает КПД трансмиссии;
-увеличивается расход топлива;
-ухудшается управляемость и устойчивость автомобиля на твердой дороге;
-увеличивается износ шин.
Обычно: у большинства дорожных автомобилей Кб = 2…2,5; |
||||||
у кулачкового (повышенного трения) – 3…4; |
||||||
у червячного – 6…12; |
|
|
|
|
||
у принудительно заблокированного – Кб = ∞. |
||||||
|
6.4. Основы расчета дифференциала |
|||||
|
|
|
|
|
И |
|
|
FД |
|
|
|
ωд |
|
|
|
|
Д |
|
||
l2 |
|
|
|
FС |
||
|
|
А |
|
|||
l1 |
|
|
|
r1 |
||
|
|
б |
d |
|
rср |
|
|
|
|
|
|
||
|
и |
|
|
|
|
|
С |
|
|
|
|
Ось сател- |
|
|
|
|
|
литов |
||
|
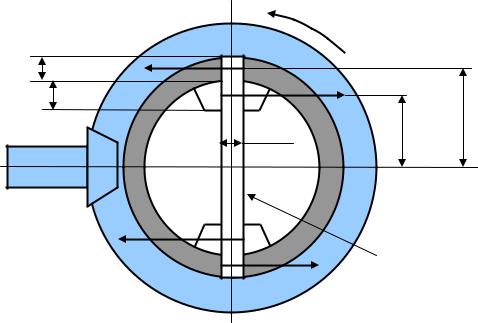
Рис. 82. Расчетная схема дифференциала |
|||||
В этом дифференциале (рис.82) два сателлита, расположенных на одной оси.
На каждый сателлит от корпуса дифференциала действует сила,
Н:
100
FС = Меmax uК1 u0 ,
rср z
где Меmax – максимальный момент двигателя, Н∙м; uК1 – передаточное число КП первой передачи; u0 – передаточное число главной передачи; rср – средний радиус приложения силы к сателлиту, м; r1 – радиус приложения силы в корпусе, м; Z – число сателлитов.
От этой силы ось под сателлитом испытывает напряжение смя-
тия |
|
|
|
|
FС |
|
|
|
σ |
см |
= |
, |
|
||||
|
|
|
||||||
|
|
d l |
|
|||||
|
|
|
|
|
1 |
|
|
|
где d – диаметр оси, м; l1 – высота сателлита, м; [σсм]=50...60 МПа – |
||||||||
допускаемое напряжение смятия материала оси. |
||||||||
|
|
|
|
|
|
|
|
И |
Напряжение среза оси по основанию сателлита |
||||||||
τср = |
|
FС |
= |
4 FС |
, |
|||
где S – площадь среза, м2; [τср] |
|
|
S |
|
π d 2 |
|
||
=100...120МПа – допускаемое напря- |
||||||||
жение среза оси.
В корпусе дифференциала на ось действует сила смятия, Н |
|||||||||
|
|
F |
|
= |
М |
|
Дu u |
||
|
|
Д |
|
еmax |
|
К1 0 . |
|||
|
|
|
|
|
|
r1 |
z |
||
Под действием этой с лыАось в корпусе испытывает напряжение |
|||||||||
смятия |
|
б |
|
|
|||||
|
|
|
|
||||||
|
|
|
σ |
= |
|
FД |
|
, |
|
|
|
|
|
|
|
||||
|
исм |
|
|
d l2 |
|||||
где l2 – высота заделки оси в корпусе дифференциала, м; допускаемое |
|||||||||
напряжение смятия [σсм]=10...20 МПа. |
|||||||||
|
С |
|
|
|
|
|
|
|
|
ГЛАВА 7. ПОЛУОСИ И БАЛКИ МОСТОВ 7.1. Полуоси
Полуоси предназначены для передачи потока мощности от дифференциала на ведущие колеса. Полуоси могут частично или полностью воспринимать силы и моменты, действующие на колеса.
Классификация полуосей
1.По условиям нагружения:
1)полностью нагруженная полуось (рис.83)
101

Рис. 83. Полностью нагруженная полуось
Сейчас такая конструкция не применяется, поскольку поломка полуоси между подшипником и корпусом дифференциала приводит к разрушению балки моста и главной передачи.
2) полуразгруженная полуось (рис.84)
|
|
|
Д |
|
|
А |
|
|
Рис. 84. ПолуразгруженнаяИполуось |
||
Такая конструкция применяется в легковых автомобилях клас- |
|||
сической компоновки. |
б |
|
|
|
|
|
|
3) на 3/4 разгруженная полуось (рис.85) |
|||
и |
|
|
|
СРис. 85. На 3/4 разгруженная полуось |
|||
Конструкция применялась раньше на грузовых автомобилях. Теперь не применяется.
4) полностью разгруженная полуось (рис. 86)
Такой тип применяется на современных грузовых автомобилях.
102

|
Рис. 86 Полностью разгруженная полуось |
|
|||||
2. По конструктивным особенностям (по назначению): |
|
||||||
1) |
бесшарнирные; |
|
|
|
|
||
2) |
шарнирные (у переднеприводных). |
|
|||||
3. По способу связи с ведущими колесами: |
|
||||||
1) |
фланцевые; |
ДИ |
|
||||
2) |
бесфланцевые. |
|
|||||
|
|
|
|
||||
ния |
|
|
|
|
|
напряжению |
круче- |
|
|
|
|
|
|
|
|
|
τкр = |
М |
= |
|
M К |
, |
|
|
|
|
0,2d 3 |
|
|||
|
WP |
|
|
|
|||
где M К = 0,7M emax uK1 uPK u0 |
– крутящий момент на колесе, Н∙м; |
||||
Меmax – максимальный момент двигателяА, Н∙м. |
|||||
Коэффициент 0,7 перед моментом двигателя говорит о том, что |
|||||
|
С |
|
|
|
|
из-за трения в дифференцбале на отстающее колесо может переда- |
|||||
ваться больше полов ны момента (70% в данном случае). |
|||||
Для расчета другихиполуосей нужно кроме крутящего момента |
|||||
учитывать все силовые факторы, действующие на колесо. |
|||||
|
МК |
МТ |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
rК |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
FК |
FТ |
RY |
||
GK или GКД
Рис. 87. Силовые факторы, действующие на колесо
103

GK = G2ось m – величина статической нагрузки на колесо, Н; m –
коэффициент перераспределения нагрузки по осям при разгоне и торможении (1,1…1,4 – большие значения у легковых автомобилей).
GКД = GК∙КД – динамическая нагрузка на колесо при движении по неровной дороге, Н. КД = 2 для дорожных автомобилей, для автомобилей повышенной проходимости – 3…4.
МК = 0,7Мe max uТР – момент на колесе, Н∙м. Он же – момент на полуоси (повторение формулы из начала раздела),
FК, FТ – тяговая и тормозная силы на колесе, Н
FК = МrКК ,
RY – боковая сила, Н |
|
|
И |
||||
2hg ϕmax |
|
||||||
|
G |
|
|
|
|||
R = |
ось |
ϕ |
|
1± |
B |
Д, здесь hg – высота центра |
|
2 |
|
||||||
Y |
|
max |
|
|
|
||
тяжести автомобиля, м; В – колея автомобиля, м. |
|||||||
|
|
|
|
|
А |
|
|
Поскольку эти с ловые факторы действуют не одновременно, а |
|||||||
в определенном сочетан б, расчет полуосей, а также балок мостов |
|||||||
производится по четырем расчетным режимам поочередно. В резуль- |
|||||||
тате выбирается наиболееинапряженный режим: |
|||||||
1. Движение с максимальной тяговой силой. |
|||||||
|
С |
|
|
|
|||
FТ = GK ϕmax ,
где rК – радиус качения колеса принимается равным радиусу качения в свободном режиме, м; φmax – коэффициент сцепления колеса с доро-
гой.
Учитываются силовые факторы GK, МК, FК. 2. Движение с предельным торможением.
Учитываются GK, FТ, МТ.
Если тормозной момент через полуось не передается (момент через тормозной механизм воспринимается балкой моста), то он и не учитывается в этом режиме.
3. Движение с боковым заносом
GK, RY.
4. Движение по неровной дороге с высокой скоростью
GКД.
104

Пример расчета полуоси (полуразгруженной)
МК 
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
RY |
|
|
|
|
|
|
|
|
rК |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
FК |
FТ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
GК |
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
Рис. 88. Расчетная схема полуразгруженной полуоси |
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
1. По первому расчетному режиму |
И |
|
|||||||||||||||||||||||||
Миз1 =GК а |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
Миз2 = FК а |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
МК = 0,7Меmax uтр |
|
|
|
|
|||||||||||||||||||||||
Мрез = |
|
|
Миз2 |
1 + Миз2 |
2 + МК2 |
|
|
||||||||||||||||||||
σрез |
= |
|
Мрез |
= |
|
Мрез |
|
|
|
≤[σ] |
Д |
|
|||||||||||||||
|
|
|
|
|
0,1 d 3 |
|
|||||||||||||||||||||
|
|
|
|
|
WХ |
|
|
|
|
|
|
|
|
|
|
||||||||||||
2. По второму расчетномубАрежиму |
|
|
|
||||||||||||||||||||||||
Миз1 =GК а |
|
|
|
и |
|
|
|
|
|||||||||||||||||||
Миз2 = FТ а |
|
|
|
|
|
|
|
|
|||||||||||||||||||
Мрез |
= |
|
|
Миз2 |
1 + Миз2 |
2 |
|
|
|
|
|
|
|
||||||||||||||
σ |
рез |
= |
Мрез |
= |
|
Мрез |
|
|
|
|
≤[σ] |
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
||||||||||||||
|
|
|
|
W |
|
|
|
|
|
|
|
|
|
d |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
С0,1 |
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
X |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
3. По третьему расчетному режиму |
|
|
|
||||||||||||||||||||||||
Миз = GК а ± RY rК |
|
|
|
|
|
|
|
|
|||||||||||||||||||
σ = Миз = |
Миз |
≤[σ] |
|
|
|
|
|||||||||||||||||||||
0,1 d 3 |
|
|
|
|
|||||||||||||||||||||||
|
WX |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
4.По четвертому расчетному случаю
Миз =GКД а
σ = Миз ≤[σ]
WX
105