

1711
.pdfмем закон y 0 sin t и построим его график (рис. 9.5), построенный со-
гласно приведённым данным (табл. 9.1).
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 9.1 |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
t |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
2 |
|
|||
|
|
|
2 |
|
|
|
|
|
|
|
2 |
|
|
|
|||||||
t |
0 |
|
|
|
|
|
|
|
|
|
|
3 |
2 |
|
|||||||
|
|
|
2 |
|
|
|
|
|
|
|
2 |
|
|
|
|||||||
|
y |
|
|
|
|
|
|
|
Т |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
А |
|
|
|
|
|
А |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Рис. 9.5
Из анализа графика (см. рис. 9.5) очевидно, что все циклы колебаний одинаковые. Наибольшее отклонение массы от положения статического равновесия равно постоянной величине, которая носит название амплиту-
ды колебаний А 0 . Удвоенная величина амплитуды колебаний состав-
ляет размах колеблющейся точки. Время Т, за которое балка совершает полный цикл колебаний, называется периодом колебаний. Из анализа гра-
фика (см. рис. 9.5) можно записать, чтоТ 2 . Число полных циклов ко-
лебаний в единицу времени называется частотой колебаний; если взять за единицу времени 2 с, то частота собственных (свободных) колебаний
|
2 |
с |
-1 |
. Учитывая, что |
|
2 |
|
1 |
, |
частота собственных колебаний |
||||
Т |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
m 11 |
|
||||||
может быть определена из выражения |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
1 |
. |
(9.12) |
||||
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
m 11 |
|
|||
120

9.4.Вынужденные колебания системы
содной степенью свободы
Рассмотрим балку (рис. 9.6) с массой m. К массе приложена F(t) – возмущающая сила, создающая вынужденные колебания и изменяющаяся по гармоническому закону F(t) F0 cos t. Частота возмущающей силы обозначена символом , а амплитудное значение возмущающей силы – F0.
F(t)
● m |
x |
y(t) |
J
y
F
Рис. 9.6
Рассмотрим положение массы m в момент времени t. Отклонение массы обозначим y(t). В отклоненном положении на массу действуют силы: F(t) – возмущающая сила; J(t) – сила инерции; частота возмущающей силы; F0 амплитуда силы F(t).
Силами сопротивления, которые возникают при колебаниях, пренебрегаем. Перемещение массы в любой момент времени через единичное
перемещение определяем по выражению |
|
|
|
|
|
|
||||||||
|
у(t) F(t) J(t) 11. |
|
(9.13) |
|||||||||||
Подставим в (9.13) вместо инерционной силы J(t) выражение, пред- |
||||||||||||||
ставленное формулой |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
y(t) |
|
F(t) m |
d |
y |
|
|
|
||||||
|
|
|
|
. |
(9.14) |
|||||||||
|
|
|
|
|||||||||||
|
|
|
|
|
|
dt2 |
|
11 |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
||||
После раскрытия скобок в уравнении (9.14) и деления всех слагаемых |
||||||||||||||
на произведение массы и единичного перемещения получаем |
|
|||||||||||||
|
d 2 y(t) |
|
|
|
1 |
y(t) |
1 |
|
|
F(t). |
(9.15) |
|||
|
dt2 |
m 11 |
m |
|||||||||||
|
|
|
|
|
|
|
|
|||||||
121

Обозначим в (9.15) = |
1 |
собственная частота колебаний. |
|
 m 11
m 11
Уравнение (9.15) принимает вид
d 2 y |
2 y |
1 |
F cos t. |
(9.16) |
dt2 |
|
|||
|
m 0 |
|
||
Как известно, полное решение дифференциального уравнения (9.16) представляют в виде у y0 y2 . Общее у0 решение представляет собой решение однородного дифференциального уравнения. Частное у2 решение
уравнения (9.16) ищем в виде у2 Ccos t; |
|
d 2 y2 |
С 2 |
cos t. С учётом |
||
|
dt2 |
|||||
|
|
|
|
|
|
|
изложенного уравнение (9.16) примет следующий вид: |
|
|||||
C 2 cos t 2C cos t |
1 |
F |
cos t. |
|
(9.17) |
|
|
|
|||||
|
m 0 |
|
|
|
|
|
Из уравнения (9.17) следует, что постоянная интегрирования С может быть найдена из выражения
C |
|
|
F0 |
|
|
|
|
|
|
|
F0 |
|
|
|
. |
(9.18) |
||||||||
m( |
2 |
|
2 |
) |
|
m 2 |
|
|
2 |
|||||||||||||||
|
|
|
|
|
|
|
|
|
1 |
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|||||
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
С учетом 2 |
|
постоянная интегрирования С |
получается |
|||||||||||||||||||||
m 11 |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
равной |
|
|
F0 11 |
|
|
|
yст |
|
|
|
|
|
|
|||||||||||
|
|
C |
|
|
. |
|
|
|
|
(9.19) |
||||||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
1 |
|
2 |
|
|
1 |
2 |
|
|
|
|
|
|
|||||||
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
||||||||||
В (9.19) yст = F0δ11. Замечаем, что амплитуда вынужденных колебаний от силы, изменяющейся по гармоническому закону, больше, чем прогиб от
силы, приложенной статически. Обозначим |
1 |
|
динамический |
|
1 |
2 |
|
||
|
|
|
||
|
|
|
|
|
|
2 |
|
|
|
коэффициент. График изменения динамического коэффициента μ в зави-
симости от отношения показан на рис. 9.7.
122

μ
1
Θ/ω
1 2 3
Рис. 9.7
При = 1, коэффициент μ равен ∞, что означает бесконечно большие
прогибы в конструкции, а это равносильно ее разрушению. Явление, при котором частота собственных колебаний ω совпадает с частотой возмущающей силы , называется резонансом. Резонанс опасен для конструкций, поэтому надо стремиться к тому, чтобы частоты ω и не совпадали.
Полное решение дифференциального уравнения (9.16) для вынужденных колебаний имеет вид
y y0 cos t |
0 |
sin t yст cos t . |
(9.20) |
|
|||
|
|
|
|
Анализируя выражение (9.20), отмечаем, что первые два слагаемые описывают собственные колебания и быстро затухают. Третье слагаемое описывает вынужденные колебания, которые остаются и имеют ту же частоту, что и возмущающая сила F(t).
9.5.Собственные колебания системы
сконечным числом степеней свободы
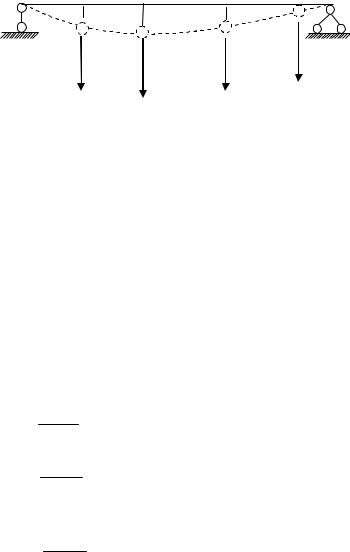
Рассмотрим балку (рис. 9.8) с n сосредоточенными массами, которые совершают собственные колебания в вертикальной плоскости. Вращения, горизонтальные смещения масс и силы сопротивления внешней среды при анализе колебательного процесса не учитываются.
Число степеней свободы такой системы равно n. К каждой из масс приложены силы инерции J1,J2,…, Jn. В этом случае имеют место собственные колебания системы с n степенями свободы.
123
y1(t) |
y2(t) |
yi(t) |
yn(t) |
● |
● |
● |
● |
m1 |
m2 |
mi |
mn |
J1 |
J2 |
Ji |
Jn |
Рис. 9.8
Обозначим отклонение масс y1, y2,…, yn, а амплитуды колебаний A1, A2,…, An.
Уравнения движения масс примем в виде, описанном выражениями
y1 A1 sin t ; |
|
|
y2 A2 sin t ; |
(9.21) |
|
........................... |
. |
|
yn An sin t |
|
|
В соответствии с принятым законом колебаний (9.21) определим силы инерции:
2
J1 m1 ddty21 m1ω2 A1sin( t + ) = m1 2y1
2
J2 = m2 ddty22 m2 2A2 sin( t + ) = m1 2y1;
…………………………………………………… (9.22)
Jn mn ddt2 y2n mnω2 Ansin ωt ν mnω2 yn.
Найдем перемещения точек прикрепления каждой из масс от всех инерционных сил:
y1 11m1 2 y1 12m2 2 y2 ... 1nmn 2 yn ;
y |
2 |
|
m 2 y |
|
22 |
m |
2 y |
... |
2n |
m |
2 y |
; |
|
|||
|
|
21 1 |
1 |
|
2 |
2 |
|
n |
n |
|
|
|
||||
………………………………………… |
|
|
|
|
(9.23) |
|||||||||||
y |
n |
|
m 2 y |
|
n2 |
m 2 y |
... |
nn |
m |
2 y |
. |
|
||||
|
|
n1 1 |
1 |
|
2 |
2 |
|
n |
n |
|
|
|
||||
Разделим в (9.23) все слагаемые на ω2 и, обозначая |
|
1 |
(собствен- |
|||||||||||||
2 |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
ное число), перенося все слагаемые в одну сторону, получим систему ли-
124

нейных однородных алгебраических уравнений, неизвестными в которых являются перемещения у точек прикрепления масс.
m1 11 y1 ... mi 1i yi ... mn 1n yn 0;
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
...................................................................... |
|||||||||||||||||
m |
y |
1 |
|
... m |
|
ii |
y |
i |
... |
m |
n |
|
in |
y |
n |
0 ; |
|
|
1 i1 |
|
|
i |
|
|
|
|
|
|
|
||||||
...................................................................... |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
mn nn yn 0. |
||||||||
|
|
|
|
|
mi ni yi |
||||||||||||
m1 n1 y1 |
|||||||||||||||||
(9.24)
Система уравнений (9.24) имеет два решения. Первое, когда неизвестные (в данном случае у) равны 0. Такое решение не соответствует физике этой задачи, т.к. оно обозначает, что рассматриваемая балка находится в состоянии покоя. Второе отличное от нуля, когда (y1 0; y2 0; yn 0 и т.д.). Но это решение возможно лишь в том случае, если ее определитель, составленный из коэффициентов при неизвестных, будет равен нулю.
Определитель, составленный из коэффициентов при неизвестных, представляет собой уравнение, которое называется характеристическим или вековым. Для определения корней λ1, λ2,…, λn этого уравнения каждому
значению λi соответствует собственная частота |
i |
|
|
1 |
|
. Число частот |
|
|
|
||||
|
|
|
|
|||
|
|
|
|
|
||
равно числу степеней свободы рассматриваемой системы. Покажем первые три формы колебаний для рассмотренной ранее балки (рис. 9.9).
m1 11 |
... |
mi 1i |
... |
mn 1n |
|
|
... |
... |
... |
... |
... |
|
|
m1 i1 |
... |
mi ii ... |
mn in |
=0 вековое уравнение. |
(9.25) |
|
... |
... |
... |
... |
... |
|
|
m1 n1 |
... |
mi ni |
... |
mn nn |
|
|
Свободные колебания систем могут происходить как по одной из форм колебаний, так и по совокупности нескольких форм. В рассмотренном решении не учтены силы сопротивления, что является приближенным решением. Для практических задач результаты приведенного расчета систем на собственные колебания являются приемлемыми с достаточной степенью точности. Каждой частоте ωi соответствует своя форма колебаний.
125

m1 m2 m3 mn
● ● ● ● 
1-я форма
1
2-я форма 2
3-я форма 3
Рис. 9.9
9.6. Вынужденные колебания системы с n степенями свободы
Рассмотрим систему (рис. 9.10) с n массами, на которую, кроме того, действует внешняя сила F(t)= F0 cos t, изменяющаяся по гармоническому
закону cos t. |
|
|
|
|
|||
F(t)= F0 cosΘt |
m2 |
mi |
mn |
||||
|
|
|
m1 |
||||
|
|
|
●y1(t)●у2(t) |
●yi(t) ● |
|||
|
|
|
|||||
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
yn(t) |
|
|
|
|
J1 |
J2 |
Ji |
Jn |
|
Рис. 9.10
Перемещения масс определяем в соответствии с принципами суперпозиции и Даламбера, используя при этом единичные перемещения .
y1 11J1 |
12J2 |
13J3 |
... 1n Jn F(t) 1F ; |
y2 21J1 |
22J2 |
23J3 |
... 2n Jn F(t) 2F ; |
…………………………………………………… (9.26)
yn n1J1 n2J2 n3J3 ... nn Jn F(t) nF .
126

В (9.26) J1, J2, … , Jn – инерционные силы; ij – перемещение в направ-
лении i-й массы от действия силы F = 1, приложенной в точке прикрепления j-й массы; iF перемещение i-й массы от действия силы F(t) = 1. Движение масс во времени будет происходить по тому же закону, по которому меняется внешняя возмущающая сила: y1 A1 cos t; y2 A2 cos t ;…; yn An cos t.
Силы инерции, приложенные к каждой из масс, имеют вид
J1 m1 d2 y21 m1 2A1cos t m1 2 y1;
dt
J2 m2 d2 y22 m2 2A2 cos t m2 2 y2 ;
dt
…………………………… ………….. |
(9.27) |
Jn mn d2 y2n mn 2An cos t mn 2 yn . dt
Подставляем (9.27) в систему (9.26) и, сокращая на cos t, получаем следующую систему уравнений:
|
|
|
|
|
|
|
* |
|
J |
1 |
|
12 |
J |
2 |
... |
1n |
J |
n |
F |
1F |
0; |
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
11 |
|
|
|
|
J |
... |
J |
0 |
0; |
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
21 |
J |
1 |
|
* |
|
2 |
2n |
n |
F |
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
22 |
|
|
|
|
|
|
|
0 2F |
|
|
|
|
|
|
(9.28) |
|||||||||
|
|
|
|
|
|
................................................................ |
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
J |
|
|
|
|
|
|
J |
|
... |
* |
J |
|
|
F |
|
0. |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
n1 |
1 |
|
n2 |
2 |
nn |
n |
nF |
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
||||||||||
В |
|
уравнениях |
|
|
|
|
|
|
(9.28) |
|
|
главные |
|
|
диагональные |
|
коэффициенты |
||||||||||||||||||||
|
|
* |
|
|
|
|
1 |
|
|
|
; |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
* |
|
|
|
1 |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
; … ; |
|
|
|
|
|
. |
|||||||||||
|
|
|
|
|
|
|
|
|
m 2 |
|
m 2 |
||||||||||||||||||||||||||
|
11 |
|
11 |
|
m 2 |
|
22 |
|
|
|
|
22 |
|
|
|
|
nn |
|
|
nn |
|
|
|||||||||||||||
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
n |
|
||
Следует отметить, что эти коэффициенты в отличие от главных диагональных систем канонических уравнений метода сил и метода перемещений могут быть отрицательными. Решая систему (9.28), находим амплитудные значения инерционных сил J1, …, Jn. Силы инерции будут меняться по такому же гармоническому закону, как и возмущающая сила F(t):
J1(t) J1 cos t; J2(t) J2 cos t;…; Jn (t) Jn cos t.
Определив инерционные силы, можно определить изгибающие моменты (динамические), которые возникают в поперечных сечениях рассматриваемой конструкции в состоянии наибольших отклонений масс от положения равновесия. В соответствии с этим можно записать
127

|
|
|
|
|
Мдин |
МF Mi Ji . |
(9.29) |
||
|
t |
|
||
где MFt – изгибающий момент от действия амплитудного F0 значения
возмущающей силы F(t); Mi изгибающий момент от действия силы F=1, приложенной к точке прикрепления i-й массы.
Определив Mдин, можно найти Qдин, используя для этого известную из сопротивления материалов дифференциальную зависимость
Qдин dMдин tg , где – угол наклона Mдин с осью балки (рамы). dS
Вырезая узлы на эпюре Qдин, определяем Nдин.
9.7. Расчет рамы на динамическое действие нагрузки
Рассмотрим раму (рис. 9.11).
m1 m2
● ●
h/2 |
ℓ/2 |
ℓ/2 |
ℓ/2 |
F(t)
h/2
Рис. 9.11 |
|
|
|
|
|
|
Исходные данные: = 6 м; h = 4 м; m1 |
|
кН с |
2 |
; m2 = 3 |
кН с2 |
|
= 4 |
|
|
|
; |
||
м |
|
|
||||
F0 = 30 кН; EJ = 7000 кН м2. |
|
|
|
м |
||
|
|
|
|
|
|
|
1.Определение числа степеней свободы: каждая из масс m1 и m2 может перемещаться только в вертикальном направлении, следовательно, число степеней свободы рассчитываемой рамы равно 2.
2.Построение единичных и грузовой эпюр.
Вточке приложения массы m1 прикладываем F = 1 и строим эпюруМ 1, изображённую на рис. 9.12.
Вточке приложения массы m2 прикладываем F = 1 и строим эпюру
М2, изображённую на рис. 9.13.
128

В точке действия возмущающей силы прикладываем амплитудное зна- |
|||||||||||||||||||||
чение этой силы F0 и строим эпюру MF , изображённую на рис. 9.14. |
|||||||||||||||||||||
3. Определение коэффициентов δiK, |
iF: |
|
|
|
|
|
|||||||||||||||
12 Эп.М1 Эп.М2 |
1 |
3 4 |
2 6 |
1 |
6 3 3 |
1 |
6 3 3 3 |
|
|||||||||||||
|
|
|
|
|
|
|
EJ |
128,5 |
2EJ |
|
3 |
EJ |
|
EJ |
2 |
|
|||||
|
1 |
|
1 |
3 3 |
2 |
3 |
; |
|
|
|
|
|
|
|
|
|
|||||
EJ |
2 |
3 |
|
EJ |
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
22 |
Эп.M2 Эп.M2 |
1 3 4 2 3 |
1 3 6 3 |
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
EY |
|
|
|
2EJ |
|
3 |
|
EJ |
|
|
|
|
|
+ |
1 |
|
1 |
3 3 |
2 3 |
75 |
; |
|
|
|
|
|
|
|
|
|
|||||
|
2EJ |
2 |
|
|
3 |
|
EJ |
|
|
|
|
|
|
|
|
|
|
|
|||
11 |
|
Эп.М1 Эп.М2 |
1 4 6 2 6 1 3 6 6 |
1 3 3 2 3 |
|||||||||||||||||
|
|
|
|
|
|
|
|
EJ |
|
|
|
2EJ |
|
3 |
|
EJ |
|
|
2EJ |
3 |
|
|
|
3 |
2 6 6 2 3 3 2 3 6 246; |
|
|
|
|
|
|
||||||||||||
|
6EJ |
|
|
|
|
|
|
|
|
|
|
|
EJ |
|
|
|
|
|
|
||
1F |
|
Эп.MF Эп.M1 |
|
|
1 |
1 2 30 2 3 1 |
2 2 30 3 30 6 240; |
||||||||||||||
|
|
|
|
|
|
|
|
EJ |
|
|
|
|
EJ |
2 |
|
3 |
EJ |
6 |
|
|
EJ |
2F |
|
Эп.MF Эп.M2 1 |
1 2 30 2 1,5 |
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
EJ |
|
|
|
2EJ |
2 |
|
3 |
|
|
|
|
||
|
|
|
1 |
|
2 2 30 1,5 30 3 120. |
|
|
|
|
|
|
||||||||||
|
|
EJ |
|
6 |
|
|
|
|
|
|
|
EJ |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
_ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6 |
|
|
|
|
|
F=1 |
|
|
3 |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6 |
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
3 |
|
|
3 |
|
|
3 |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
3 |
|
|
|
_ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Эп. М1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 9.12 |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
129 |
|
|
|
|
|
|