


(х1*,х2*,…,хк*) поверхности отклика |
y f x ,x |
2 |
,...,x |
k |
, в которой она |
максимальна (минимальна). |
1 |
|
|
||
|
|
|
|
|
|
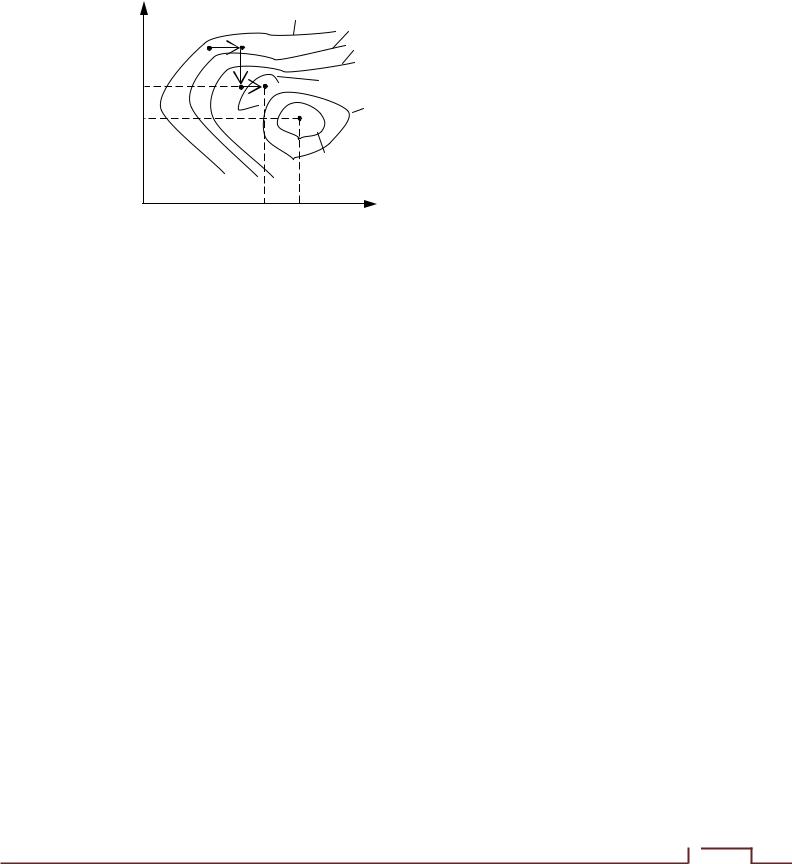
Графическая интерпретация |
задачи |
оптимизации объекта |
|||
y f x1,x2 представлена на рис. |
5.1. Здесь точка А соответствует |
||||
оптимальным значениям факторов х1* и х2*, обеспечивающих максимум функции отклика ymax. Замкнутые линии на рис. 5.1 характеризу-
ют |
линии |
|
постоянного |
уровня |
и |
|
описываются |
уравнением |
||||
y f x1,x2 B const. |
|
|
|
|
|
|
|
|||||
|
Поисковые методы |
оп- |
|
|
у |
|
ymax |
|
||||
тимальных значений относят- |
|
|
|
|
||||||||
ся |
к классу |
итерационных |
|
|
|
|
f(x1 х2) |
|||||
процедур, при этом весь про- |
|
|
|
|
|
f(x1 х2)=B1 |
||||||
цесс разбивается на шаги, на |
|
|
|
|
|
|||||||
каждом шаге проводится ряд |
|
|
|
|
|
|
||||||
опытов и определяется, каким |
|
|
|
|
|
х2 |
||||||
образом |
нужно |
изменить |
|
|
|
|
|
|
||||
факторы, влияющие на про- |
|
|
|
|
A |
|
||||||
цесс, чтобы получить улуч- |
|
|
|
|
|
|||||||
|
|
|
И |
|
||||||||
шение результата. |
При этом |
х1 |
Д |
|
|
|||||||
на |
каждом |
очередном шаге |
|
х2* |
х2 |
|||||||
получаемая |
информация |
ис- |
|
|
|
|||||||
А |
|
|
|
B3 |
||||||||
пользуется для выбора после- |
* |
|
A |
|||||||||
дующего шага. |
|
|
|
B2 |
||||||||
|
|
|
|
|||||||||
|
|
|
х1 |
|
|
|||||||
|
Разработано |
множество |
|
|
|
|
B1 |
|||||
|
|
|
|
|
б |
|
|
|
|
|||
методов пошаговой опт м - |
|
|
|
|
|
|
||||||
зации, которые подробно рас- |
|
х1 |
|
|
|
|||||||
|
|
|
|
|
и |
|
|
|
|
|
|
|
сматриваются в разделе вы- |
|
Рис. 5.1. Графическая интерпретация |
||||||||||
числительной |
математики – |
|
||||||||||
«Численные методыСоптими- |
|
задачи оптимизации |
|
|||||||||
зации». |
Рассмотрим некото- |
|
|
|
|
|
|
|||||
рые из них, эффективность использования которых в эксперименте подтверждена практикой.
5.1. Метод покоординатной оптимизации
Иллюстрация метода покоординатной оптимизации приведена на рис. 5.2. Выбирается произвольная точка М0 и определяются её координаты. Поиск оптимума осуществляется поочерёдным варьированием каждого из факторов. При этом сначала изменяют один фактор
93
х1 при фиксированных остальных (х2=const) до тех пор, пока не прекращается прирост функции отклика (точка М1). В дальнейшем изменяется другой фактор х2 при фиксированных остальных (х1=const), и далее процедура повторяется.
ну вдоль координатных осей х1 и х2 вызывает появление ложного экс-
|
|
|
|
|
|
|
Данный |
метод весьма |
||
x2 |
|
B1 |
B2 |
|
прост, однако при большом |
|||||
M0 |
M1 |
|
|
числе |
факторов |
требуется |
||||
|
|
B3 |
|
|||||||
|
|
|
|
|
значительное число опытов, |
|||||
~ |
|
B4 |
|
|
|
|
||||
A/ |
|
|
|
|
чтобы |
достичь |
координат |
|||
x2 |
|
|
|
|
||||||
|
M2 |
|
|
|
|
|
оптимума. Более |
того, при |
||
* |
A |
|
B5 |
|
|
|||||
x2 |
|
|
|
|
|
некоторых |
зависимостях |
|||
|
|
|
|
|
|
|
||||
|
|
B6 |
|
|
y f x1,x2,...,xk |
этот ме- |
||||
|
|
|
B6>B5>B4 |
|||||||
|
|
|
|
|
|
|
тод может привести к лож- |
|||
|
|
|
|
|
|
|
||||
|
~ |
* |
|
x1 |
|
ному результату. На рис. 5.2 |
||||
|
x1 |
x1 |
|
|
показан один из таких част- |
|||||
Рис. 5.2. Метод покоординатной |
|
ных случаев, |
когда пооче- |
|||||||
|
рёдное |
изменение каждого |
||||||||
оптимизации |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
из факторов в любую сторо- |
|||
|
|
|
|
|
|
|
И |
|
|
|
|
|
|
|
|
|
Д |
|
|
|
|
тремума в точке А/, в то время как действительное значение экстре- |
|
|
б |
мума находится в точке А. |
|
и |
|
5.2. Метод крутогоАвосхождения |
|
С |
|
Кратчайший путь – это движение по градиенту, т.е. перпендикулярно линиям равного уровня. В связи с этим при оптимизации процесса рабочее движение целесообразно совершать в направлении наиболее быстрого возрастания функции отклика, т.е. в направлении градиента функции у.
Существуют различные модификации градиентного метода, одним из них является метод крутого восхождения. Сущность этого метода рассмотрим на примере двухфакторной задачи.
В этом случае шаговое движение осуществляется в направлении наискорейшего возрастания функции отклика, т.е. grad y x1,x2 . Однако направление корректируют не после каждого следующего шага, а при достижении в некоторой точке на данном направлении частного экстремума функции отклика.
Пусть в окрестности точки М0 как центра плана поставлен ПФЭ 22. Координаты отдельных опытов соответствуют точкам 1-4.
94

По результатам ПФЭ можно рассчитать коэффициенты линейного уравнения регрессии ~y b0 b1x1 b2x2 .
Градиент функции отклика в этой точке определяется как
|
y |
|
y |
|
|
|
grad y |
|
i |
|
j . |
(5.1) |
|
x1 |
x2 |
|||||
|
|
|
|
х2
|
|
И |
|
|
Д |
х1 |
|
А |
|
|
|
Рис. 5.3. Метод крутого восхождения |
|
||
б |
|
|
|
Следовательно, для движения по градиенту необходимо изменять факторы пропорционально их коэффициентам регрессии и в сто-
движутся в этом направлен до тех пор, пока не будет обнаружен
рону, соответствующуюизнаку коэффициента. В процессе поиска
локальный максимум М . В точке последнего находят новое направление градиентаСМ1N, осуществляя1 опять ПФЭ, и далее процедура по-
вторяется. трелками на рис. 5.3 показана траектория движения к оптимуму.
Практически алгоритм сводится к следующей последовательности операций.
1.Планирование и постановка ПФЭ (или ДФЭ) в окрестности точки начального состояния. Расчёт коэффициентов bj линейной математической модели с целью определения направления градиента.
2.Расчёт произведений bj xj , где xj – интервалы варьирова-
ния факторов при ПФЭ (ДФЭ). |
xj xj0 , у которого |
|||
|
3. Выбор базового фактора |
|||
|
bj xj |
|
a max. |
|
|
|
|
||
4. Выбор шага крутого восхождения для базового фактора ha. Этот выбор производится на основании имеющейся априорной ин-
95

формации или с учётом опыта исследователя, технологических соображений или других критериев. Относительно выбора шага заметим, что слишком малый шаг потребует значительного числа опытов при движении к оптимуму, а большой шаг создаёт опасность проскочить
область оптимума. |
|
5. Расчёт шагов изменения других факторов по формуле |
|
hj bj xj ha /a. |
(5.2) |
Это соотношение между величинами шагов изменения отдельных факторов обеспечивает движение по градиенту в факторном пространстве.
6. Составление плана движения по градиенту. Для этого в соответствии с определёнными значениями шагов изменения факторов и их последовательным алгебраическим суммированием с основным
ленными». «Мысленный» опыт заключаетсяИв получении предсказанных (расчётных) значений функции отклика по линейному уравнению
уровнем в точке
xjk xj0 khj, k 1,2,
личить скорость продвижения к экстремумуД. При «мысленном» экс-
находят координаты опытов 5-10. Часть этих опытов полагают «мыс-
их в уравнение модели о ъектаАдолжны подтвердить действительное возрастание у. Обычно реальные опыты в начале движения из базовой
регрессии, что позволяет сократить объём реальных опытов, т.е. уве-
точки вдоль направленСиябградиента ставятся через 2-4 мысленных опыта. Другие опыты реал зуют на практике, определяя последовательность значений у в направлении градиента. Из опытных данных находят положение локального экстремума М1.
перименте перевод координат в кодированную форму и подстановка
7. В окрестности локального экстремума ставят нулевую серию опытов (ПФЭ или ДФЭ) для определения новых значений коэффициентов уравнения регрессии и нового направления градиента М1N. В дальнейшем процедура повторяется до достижения следующего локального экстремума и так далее вплоть до определения окрестности координат максимума функции отклика, которая называется почти стационарной областью.
Признаком достижения этой области является статистическая незначимость коэффициентов bj. В почти стационарной области становятся значимы эффекты взаимодействия и квадратичные эффекты. Здесь требуется переходить от ДФЭ (если он проводился ранее) к
96