

1629
.pdfМинистерство образования и науки РФ ФГБОУ ВПО «СибАДИ»
Кафедра «Подъемно-транспортные, тяговые машины и гидропривод»
МОДЕЛИРОВАНИЕ ГИДРАВЛИЧЕСКИХ СИСТЕМ РУЛЕВОГО УПРАВЛЕНИЯ
Методические указания для курсового и дипломного проектирования
Составитель: А.В. Жданов
Омск
СибАДИ
2011
1
УДК 625.76.08(021) ББК 39.311-06-05
Рецензент канд. техн. наук, доцент А.А. Руппель (СибАДИ)
Работа одобрена научно-методическим советом факультета НСТ в качестве методических указаний для студентов специальностей 190205 «Подъемнотранспортные, строительные, дорожные машины и оборудование» и 190109 «Наземные транспортно-технологические средства».
Моделирование гидравлических систем рулевого управления:
Методические указания для курсового и дипломного проектирования / Сост.: А.В. Жданов. – Омск: Изд-во СибАДИ, 2011. – 33 с.
Приведены основные методики математического моделирования. Методы составления расчетных, структурных и блок-схем гидравлических элементов и гидросистем рулевого управления в целом. Представлены уравнения, описывающие рабочие процессы в гидравлических элементах рулевого управления. Описаны принципы декомпозиции и композиции гидросистем рулевого управления.
Ил. 25. Библиогр.: 4 назв.
© Составитель: А.В. Жданов, 2011
2
ВВЕДЕНИЕ
Проведение теоретических исследований вновь создаваемой техники невозможно без математического описания исследуемого объекта, то есть без математического моделирования. В настоящее время широко распространено представление математических моделей в виде системы каких–либо уравнений (общих дифференциальных, частных дифференциальных, алгебраических и др.), которые с достаточной степенью точности отражают исследуемые свойства объекта.
Система рулевого управления строительных и дорожных машин (СДМ) представляет собой сложную динамическую систему, на которую действуют управляющие и возмущающие внешние воздействия, имеющие случайную природу.
Наиболее важным звеном в гидросистемах рулевого управления (ГРУ) является гидравлический рулевой механизм (ГРМ), состоящий главным образом из гидрораспределителя, гидромотора обратной связи, предохранительного и других клапанов.
При математическом моделировании ГРУ применяется системный анализ, исходя из которого, ГРУ СДМ рассматривается как сложная система, состоящая из отдельных взаимосвязанных друг с другом подсистем и отдельных элементов. Каждая выделенная подсистема имеет свои определенные свойства и законы функционирования, которые описываются математическими моделями. Математические модели подсистем в совокупности образуют сложную математическую модель системы.
Разработка математической модели ГРУ СДМ проводится на основе базовых положений методологии системного анализа.
3
1. МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ ГИДРОСИСТЕМ РУЛЕВОГО УПРАВЛЕНИЯ
Базовые элементы гидропривода описываются системами нелинейных дифференциальных уравнений с переменными коэффициентами, начальными и граничными условиями, уравнениями существенных нелинейностей, алгебраическими уравнениями связи, наложенными на систему.
Уравнения составляются таким образом, чтобы в результате решения получить значения переменных (давлений, расходов, скоростей, перемещений и т.д.) на входе и на выходе из гидроэлементов.
Параметры на входе в гидравлический элемент обозначаются индексом «1», на выходе – индексом «2».
При моделировании ГРУ составляются математические модели для каждого элемента, поскольку исследуемая система является нелинейной, то есть содержит нелинейные элементы (золотник и гильза гидрораспределителя, предохранительный клапан и т.д.). Кроме того, элементы гидропривода имеют как минимум два входных и два выходных параметра: это расходы рабочей жидкости и давления на входе и на выходе, так же, могут иметь место управляющие или возмущающие воздействия. В качестве дополнительных входных и выходных параметров могут рассматриваться узлы подвода или отбора мощности (насос, гидромотор). Еще система содержит переменные коэффициенты дифференциальных уравнений, которые изменяются во времени случайно или по какому-либо закону. Таким образом, выбранное направление математического моделирования позволяет учесть необходимое количество параметров, что способствует повышению качества модели.
Формирование математической модели ГРУ проводится в соответствии со следующими этапами:
-принятие допущений;
-обоснование расчетной схемы ГРУ;
-формирование блок-схемы ГРУ на основе расчетной схемы;
-декомпозиция (разбиение) системы на подсистемы и т.д. до получения неделимых элементов системы;
- математическое описание каждого элемента в соответствии
спринятыми допущениями;
-композиция математической модели, т.е. объединение
4

математических моделей отдельных элементов и подсистем в единую математическую модель системы.
1.1 Расчетная схема гидросистемы рулевого управления
Для составления расчетной схемы взята типовая гидравлическая схема ГРУ, изображенная на рис. 1.
Рис. 1. Схема гидравлическая принципиальная системы рулевого управления
ГРУ состоит из трехпозиционного шестилинейного распределителя 1 следящего действия, кинематически связанного с рулевым колесом 2 и гидромотором обратной связи 3 и гидравлически связанного первой и третей линиями с исполнительными гидроцилиндрами 4, второй линией с гидробаком 6, пятой линией с питающим насосом 5, обратными клапанами 8 и 9, предохранительным клапаном 7, четвертой и шестой линиями с гидромотором обратной связи 3. В первой и третей линиях трехпозиционного шестилинейного распределителя 1 установлены противовакуумные клапаны 10, 11 и противоударные клапаны 12, 13.
5
Работа принципиальной схемы ГРУ осуществляется следующим образом.
В нейтральном положении распределителя 1 поток рабочей жидкости от питающего насоса 5 поступает к пятой линии трехпозиционного шестилинейного распределителя 1 и весь поток рабочей жидкости через вторую линию распределителя 1 поступает в гидробак 6.
При повороте рулевого колеса 2 происходит рассогласование распределителя 1 (например, происходит перемещение золотника вправо). При этом вторая и пятая линии распределителя 1 рассоединяются, а поток рабочей жидкости от питающего насоса 5 через пятую и четвертую линии распределителя 1 поступает на гидромотор обратной связи 3 и далее через шестую и первую линии распределителя 1 в левую полость исполнительного гидроцилиндра 4
ипреодолевает приложенную внешнюю нагрузку. Поршень исполнительного гидроцилиндра перемещается вправо. Поток рабочей жидкости из сливной полости исполнительного гидроцилиндра 5 через четвертую и третью линии распределителя 1 поступает в гидробак 5.
На основе рассмотренной гидравлической схемы составлена
расчетная схема, которая приведена на рис. 2, где QPIT – подача на выходе из питающего насоса и на входе в гидролинию, соединяющую
насос с ГРМ; QGL1 – расход на выходе из гидролинии и на входе в гидрораспределитель; QR – расход на выходе из гидрораспределителя
ина входе в гидромотор обратной связи; QSL – расход, поступающий в гидролинию разгрузки; QOS – расход на выходе из гидромотора обратной связи и на входе в гидролинию, соединяющую ГРМ с исполнительными гидроцилиндрами; QGL2 – расход на выходе из
гидролинии и на входе в исполнительный гидроцилиндр; RCIL – усилие, приложенное к штоку исполнительного гидроцилиндра, обусловленное силами сопротивления повороту и взаимодействием шин с микрорельефом; pCIL – давление на входе в исполнительный гидроцилиндр и на выходе из гидролинии; pGL2 – давление на входе в гидролинию и на выходе из гидромотора обратной связи; pOS – давление на входе в гидромотор обратной связи и на выходе из гидрораспределителя; pR – давление на входе в гидрораспределитель и на выходе из гидролинии; pGL1 – давление питающего насоса; α(t) – угол поворота рулевого колеса (золотника); αОS(t) – угол поворота ротора гидромотора обратной связи(гильзы);
6

x(t) – перемещение штоков исполнительных гидроцилиндров.
Рис. 2. Расчетная схема гидросистемы рулевого управления
1.2 Блок-схема гидросистемы рулевого управления
На основе расчетной схемы формируется блок-схема системы. Блок-схема представляет собой совокупность блоков и связей, которые соответствуют элементам и связям расчетной схемы. Каждый блок блок-схемы представляет собой подсистему или элемент ГРУ, содержащий в себе структурную схему элемента, выполненную на основе уравнений, описывающих этот элемент.
В блок-схеме каждый блок представляет собой гидравлический многополюсник или многомерный динамический объект, поэтому блоки имеют несколько входов и выходов, соответствующих различным воздействиям.
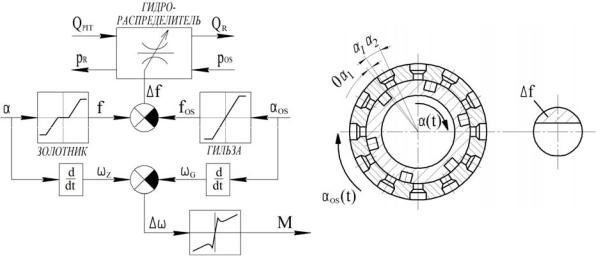
Блок-схема ГРУ представлена на рис. 3, где f – площадь проходных сечений каналов гидрораспределителя, регулируемая поворотом золотника; fОS - площадь проходных сечений каналов гидрораспределителя, регулируемая поворотом гильзы; f – регулируемая площадь проходных сечений.
7

Рис. 3. Блок-схема гидросистемы рулевого управления
При математическом описании ГРУ принимаются следующие допущения:
-влияние волновых процессов на динамику привода вследствие сравнительно малой длины магистрали не учитываются;
-температура и вязкость рабочей жидкости, а так же количество нерастворенного воздуха не изменяются в течении переходного процесса;
-коэффициент расхода управляемых дросселей является постоянной величиной;
-неравномерность подачи питающего насоса не учитывается;
-параметры гидроэлементов сосредоточены;
-эксцентриситет в паре «золотник – гильза» не учитывается.
1.3Математическое описание элементов гидросистемы рулевого управления
1.3.1 Математическая модель гидрораспределителя гидросистемы рулевого управления
Гидрораспределитель в совокупности с гидромотором обратной связи являются управляющим устройством ГРМ, его задачей является не только пуск, остановка или перераспределение потоков рабочей жидкости в системе, но и изменение расходов на выходе за счет
8
изменения площадей проходных сечений в зависимости от скорости вращения рулевого колеса.
Гидрораспределитель кранового типа состоит из золотника и гильзы. При вращении рулевого колеса управляющий золотник смещается на угол α(t), открывая при этом проходные сечения гидромоторного ряда гидрораспределителя, при этом поток рабочей жидкости попадает через гидромотор обратной связи в исполнительный гидроцилиндр, гидромотор обратной связи осуществляет отрицательную обратную связь посредством смещения гильзы золотника распределителя на угол αOS(t), регулируя при этом площади проходных сечений каналов гидрораспределителя f(t) и, как следствие, расход рабочей жидкости Q(t) на выходе из ГРМ.
Гидрораспределитель представляет собой совокупность местных сопротивлений, кроме того он является нелинейным элементом системы, поэтому статические характеристики гильзы и золотника распределителя представляются в виде нелинейных зависимостей, а сам распределитель в виде регулируемого дросселя. В паре золотникгильза при вращении рулевого колеса возникают моменты трения, обусловленные относительной скоростью вращения золотника и гильзы. Момент трения также описывается нелинейной статической характеристикой.
Блок-схема гидрораспределителя представлена на рис. 4. Расчетная схема регулирования каналов гидромоторного ряда
гидрораспределителя представлена на рис. 5.
Рис. 4. Блок-схема гидрораспределителя |
Рис. 5. Расчетная схема |
гидравлического рулевого механизма |
регулирования проходных |
|
сечений гидромоторного ряда |
9

Математическая модель гидрораспределителя состоит из математических моделей золотника и гильзы, представленных в виде нелинейных статических характеристик, математической модели регулируемого дросселя и модели трения в распределителе в паре «золотник-гильза».
Статическая характеристика золотника гидрораспределителя описывается следующим уравнением:
f |
UT |
, при |
|
α |
|
α ; |
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
rZ α |
|
|
|
|
|
2 |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
z |
|
|
arccos |
|
|
|
|
|
r0 |
rZ α |
2r0rZ α rZ α |
|
|||||||||||||||
r0 |
|
1 |
|
|
|
|
|
|
|||||||||||||||||||
f α |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r0 |
|
|
|
|
|
|
(1) |
||||
f |
UT |
,при α |
|
|
α |
|
α |
2 |
; |
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
fMAX |
fUT , при |
|
α |
|
α2 , |
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|||||||||||||||||||||
где fUT – площадь утечек; fMAX – максимальная площадь проходных сечений; z – число отверстий гидромоторного ряда; r0 – радиус отверстий гидромоторного ряда; rZ – радиус золотника.
Выражение (1) с учетом принятых допущений позволяет представить золотникввидеструктурнойсхемы(рис. 6).
Рис. 6. Структурная схема золотника гидрораспределителя
10