


~ 42 ~
Малюгин П.Н. МОДЕЛИРОВАНИЕ ДОРОЖНОГО ДВИЖЕНИЯ: учебное пособие
___________________________________________________________________________
ния, ориентируясь на экспериментальные данные, и вычислять доли интенсивности с помощью целевой функции.
Смешанное распределение позволяет хорошо описывать распределение интервалов на магистралях с непрерывным и периодическим движением: на дорогах с двумя полосами движения при интенсивности до 450 авт/ч, с четырьмя полосами – до 1000 авт/ч, и с шестью полос а- ми – до 2000 авт/ч.
На рис. 7.7 показана функция смешанного распределения для потока, состоящего из двух потоков: связанного и свободного.
Рис. 7.7. Вид функции смешанного распределения: 1 – распределение связанной части потока; 2 – распределение свободной части потока;
3 – смешанное распределение
Однако смешанное распределение является более сложным. При его применении приходится выполнять больший объем экспериментальных измерений интервалов, повышаются требования к точности измерений, усложняется математическая обработка результатов измерений.
7.5. Области применение распределений
Экспоненциальные распределения применяются для описания ТП уровней удобства А, Б и В . Области применения распределений представлены в табл. 7. 1 [2].
~ 43 ~
Глава 7. РАСПРЕДЕЛЕНИЕ ИНТЕРВАЛОВ МЕЖДУ АВТОМОБИЛЯМИ
_____________________________________________________________________________
|
Области применения распределений |
Таблица 7.1 |
|||
|
|
||||
Вид распределения |
|
Интенсивность движения |
Уровень |
||
Тип дороги |
|
2 полосы |
4 полосы |
6 полос |
Удобства |
Пуассона |
|
200 |
500 |
1100 |
А |
Пуассона |
|
250 |
600 |
1200 |
А |
с поправкой |
|
||||
|
|
|
|
|
|
Пирсона |
|
650-900 |
800-1500 |
1000-2000 |
Б, В |
типа III |
|
||||
|
|
|
|
|
|
Эрланга |
|
300 |
800 |
1200 |
Б |
Гамма |
|
250 |
850 |
1300 |
Б |
Смешанное |
|
100-3000 |
100-4000 |
100-5000 |
А, Б, В |
Распределения применяются для описания ТП низкой и средней плотности. В городских условиях движения такие потоки образуются часто. Для них вып олняются мероприятия по организации движения и разрабатываются планировочные мероприятия.
Экспоненциальные распределения и их комбинации применяют при решении следующих задач:
–оценка пропускной способности участков дорог;
–оценка пропускной способности участков пересечения, переплетения и слияния потоков;
–оптимизация режимов работы светофорных объектов;
–оценка уровня опасности движения;
–оценка эффективности планировочных решений и средств регулирования.
На практике наиболее часто применяют распределение Пуассона, так как требуется минимум исходной информации о потоке.
Для других распределений аналитические решения, пригодные непосредственно для практического применения, еще не отработаны. В связи с применением в светофорных объектах микроконтроллеров последнее замечание не уже имеет принципиального значения: современные микроконтроллеры позволяют быстро вычислять интегралы и сложные функции. Поэтому на практике вместо аналитических решений используют надежные и простые численные методы.
~ 44 ~
_____________________________________________________________________________
Глава 8. МОДЕЛИРОВАНИЕ ПЛОТНЫХ ПОТОКОВ
Потоки, в которых автомобили движутся в тесном взаимодействии друг с другом, относят к плотным потокам. Они образуются при уровне удобства Г.
В плотном потоке режим движения автомобилей устанавливается водителями, принимающими решения. Решения водителя зависят от дистанции между автомобилями, скорости, состояния покрытия дороги, технического состояния автомобиля и обстановки на соседних полосах движения [5].
Известны два подхода к описанию движения плотного потока:
1.Учитывают взаимодействие между отдельными автомобилями;
2.Представляют поток в виде сплошной среды.
Первый подход называют микроскопическим, а второй – макроскопическим.
При микроскопическом подходе используют закономерности взаимодействия одиночных автомобилей между собой в плотном потоке. Наибольшее внимание обращают на механизмы воздействия автомобилей друг на друга, детально рассматривают работу системы «автомобиль - водитель», учитывают время реакции водителей. При первом подходе используют знания, которые приобретаются при изучении дисциплины «Эксплуатационные свойства автомобилей и безопасность движения».
Модели, создаваемые при микроскопическом подходе, позволяют рассчитывать пропускную способность дорог, плотность потока, процессы слияния и пересечения потоков. Микроскопический подход дает хорошие результаты при рассмотрении коротких участков дорог.
При макроскопическом подходе поток представляют в виде сплошной среды. Например, сжимаемой или несжимаемой жидкости. Это позволяет использовать математический аппарат, разработанный в гидродинамике или динамике газов. Рассчитывают параметры, выражающие плотность, интенсивность и скорость ТП.
Модели, получаемые по второму подходу, позволяют рассчитать параметры потока и проанализировать связи между потоками. Однако опускаются механизмы взаимодействия автомобилей друг с другом, которые детально рассматриваются при первом подходе.
По первому подходу разработаны простая динамическая теория движения плотного потока и динамическая теория следования за лиде-
~ 45 ~
Глава 8. МОДЕЛИРОВАНИЕ ПЛОТНЫХ ПОТОКОВ
_____________________________________________________________________________
ром. По второму подходу разработаны спектральная теория взаимодействия автомобилей в колонне и макроскопическая теория.
8.1. Простая динамическая теория плотного потока
Основной задачей простой динамической теории является составление описания зависимости пространственного интервала d = lП, м между автомобилями от скорости и влияющих факторов.
Динамическая теория построена на двух гипотезах: автомобили движутся в потоке с известной средней скоростью, расстояние между автомобилями достаточно для их полной остановки [6].
Скорость V потока считают независимым параметром. Плотность и интенсивность ТП связывают с пространственным интервалом d. Пространственный интервал ограничивают минимальным, безопасным расстоянием между передними бамперами автомобилей.
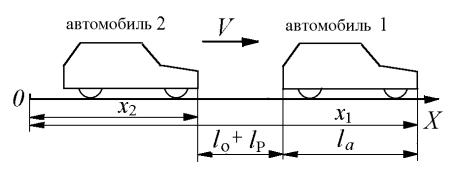
Движение автомобилей рассматривают по оси OX (рис. 8.1). Переднему автомобилю присваивают номер 1, заднему автомобилю – номер 2. Принимают, что в начальный момент времени автомобили расположены от начала оси OX на расстояниях x1 и x2.
Первое приближение
В первом приближении полагают, что тормозной путь переднего автомобиля равен тормозному пути заднего автомобиля.
Интервал d считают суммой интервалов, показанных на рис. 8.1:
d = lа + lр + lо, |
(8.1) |
где lа – длина переднего автомобиля;
lр – путь, заднего автомобиля за время реакции водителя; lо – запас пути.
Путь lр вычисляют по времени реакции водителя tр:
lр = V tр.
Формула (8.1) отражает движение автомобилей одного типа на покрытии с постоянным сцеплением. В формулу подставляют скорость V и время реакции водителя, вычисляют интервал d.
Однако практическое применение первого приближения дает большие погрешности, так как не учитываются сцепление шин с покрытием и различие тормозных свойств автомобилей. По формуле (8.1) вычисляются заниженные значения интервалов d.
~ 46 ~
Малюгин П.Н. МОДЕЛИРОВАНИЕ ДОРОЖНОГО ДВИЖЕНИЯ: учебное пособие
___________________________________________________________________________
Второе приближение
Во втором приближении полагают, что тормозной путь переднего автомобиля равен нулю.
При расчете пространственного интервала учитывают тормозной путь lт2, м заднего автомобиля:
d = lа + lр + lо + lт2. |
(8.2) |
Рис. 8.1. Схема к расчету пути автомобилей
Обычно тормозной путь lт2 вычисляют по приближенной формуле, учитывая участок установившегося торможения автомобиля:
lт2 = V2 / (2 g ϕ),
где ϕ – коэффициент сцепления шин с покрытием дороги для заднего автомобиля, ускорение g = 9,81 м/с2.
Формула (8.2) лучше соответствует экспериментальным зависимостям интервала d от скорости на разных дорогах. Однако расчеты дают завышенные значения интервала d, так как передний автомобиль не может мгновенно остановиться. Формула позволяет учесть тормозной путь второго автомобиля, но не отражает различия тормозных свойств переднего и заднего автомобилей.
Третье приближение
В третьем приближении учитывают одновременно тормозные пути переднего автомобиля lт1 и заднего автомобиля lт2:
d = lа + lр + lо + lт2 – lт1. |
(8.3) |
~ 47 ~
Глава 8. МОДЕЛИРОВАНИЕ ПЛОТНЫХ ПОТОКОВ
_____________________________________________________________________________
Для расчета тормозных путей используют приведенную выше приближенную формулу.
Для третьего приближения можно подбирать значения параметров, отражающих влияние известных факторов: времени реакции водителя, эксплуатационного состояния тормозных механизмов автомобилей и сцепления шин автомобилей с покрытием дороги. Это позволяет получить результаты близкие к фактическим данным.
Однако результаты расчетов по формуле (8.3), полученные разными исследователями, существенно различаются. Это обусловлено различными значениями параметров, которые подставляются в формулу.
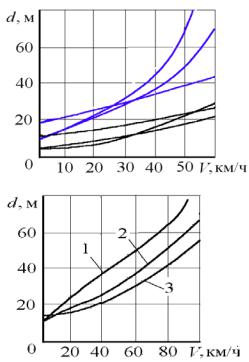
Для расчета интервалов разработаны различные формулы, рекомендованные авторитетными источниками для их практического применения. На рис. 8.2 показаны зависимости пространственных интервалов от скорости, рассчитанные по таким формулам. По графикам легко видеть, что при скорости более 35 км/ч различие интервалов увеличивается и достигает 30 … 40 м.
Однако выполненные экспериментальные исследования показывают, что на дорогах не наблюдается большого различия в величинах интервалов (рис. 8.3). По экспериментальным данным различие интервалов не превышает 20 м (кривые 1, 2). При этом полученные в США пространственные интервалы (кривая 3) в среднем меньше на 15 м, чем в СССР, что обусловлено более высокими интенсивностями движения.
Рис. 8.2. Зависимости пространственных интервалов от скорости, рассчитанные по различным формулам
Рис. 8.3. Экспериментальные зависимости пространственных интервалов от скорости, полученные: 1 – Н.Ф. Хорошиловым ,
2– В.В. Сильяновым,
3– в США
~ 48 ~
Малюгин П.Н. МОДЕЛИРОВАНИЕ ДОРОЖНОГО ДВИЖЕНИЯ: учебное пособие
___________________________________________________________________________
Одним из факторов, неучтенным в формулах, является непостоянство времени реакции водителей. Исследования показывают, что при движении в потоке время реакции водителя изменяется в течение 2 часов от 0,45 до 1,2 c. Кроме того на величину времени реакции влияет техническое состояние системы сигнализации переднего автомобиля. Например, если у переднего автомобиля система сигнализации несправна и не работает сигнал торможения, то при больших расстояниях водитель заднего автомобиля иногда реагирует на торможение через
5 … 6 c.
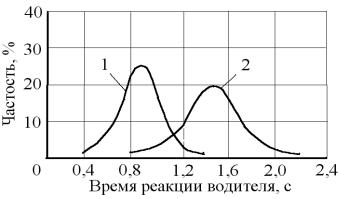
Время реакции водителя также зависит от времени рабочего дня. Эксперименты, выполненные Лобановым Е.М, показывают, что в первой половине рабочего дня время реакции изменяется от 0,3 до 0,77 c при среднем значении 0,42 c, а во второй половине рабочего дня время изменяется от 1,13 до 2,25 c при среднем значении 1,4 c (рис. 8.4). То есть увеличивается почти в два раза. При этом время реакции водителя распределяется по нормальному закону Гаусса.
Распределение времени реакции водителя по нормальному закону позволяет построить сначала распределение пространственных интервалов между автомобилями в ТП. Распределение интервалов тоже будет удовлетворять нормальному закону. Затем, используя параметры распределения, можно рассчитать процессы слияния и пересечения транспортных потоков.
Рис. 8.4. Распределение времени реакции водителя: 1 – при ожидаемом сигнале; 2 – при неожиданном сигнале
~ 49 ~
Глава 8. МОДЕЛИРОВАНИЕ ПЛОТНЫХ ПОТОКОВ
_____________________________________________________________________________
Основное уравнение
Развитием описанных приближений является основное уравнение простой динамической модели плотного потока [2], описанное Сильяновым В.В. Основное уравнение имеет следующий вид:
d = lа + lр + lо + lт2 – lт1 + lj. |
(8.4) |
В формулу введен запас пути lо, который зависит от скорости движения. Рекомендуются следующие его значения:
V, км/ч |
20 |
40 |
60 |
80 |
100 |
lо, м |
3 |
6 |
10 |
12 |
15 |
Путь заднего автомобиля lр за время запаздывания водителя вычисляется по формуле
lр = αt V2 (tр + tmin),
где αt > 1 – параметр безопасности, зависящий от величины времени запаздывания; V2 – скорость заднего автомобиля; tр – время реакции водителя; tmin – минимальное время, необходимое водителю для осознания ситуации.
Разность lт2 – lт1 тормозных путей вычисляется по формуле
lт2 – lт1 = αV (lт2 – lт1), lт1 = V12 / (2 jmax) / k, lт2 = V22 / (2 jmax),
где αV – параметр безопасности, зависящий от разности скоростей переднего V1 и заднего V2 автомобиля;
если разность V2 > V1, то параметр αV ≥ 1; если V2 < V1, то αV < 1;
параметр k ≤ 1 учитывают, если водитель заднего автомобиля тормозит с замедлением меньше максимального;
jmax – максимальное замедление переднего автомобиля, которое может ожидать водитель заднего автомобиля; оно ограничено коэффициентом сцепления шин.
Поправка lj учитывает способность водителя заднего автомобиля чувствовать величину замедления переднего автомобиля. Поправка вычисляется с помощью функции