

~ 55 ~
Глава 8. МОДЕЛИРОВАНИЕ ПЛОТНЫХ ПОТОКОВ
_____________________________________________________________________________
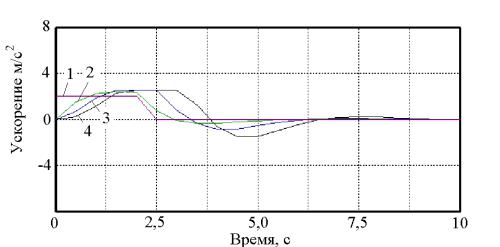
Рис. 8.7. Ускорения автомобилей при разгоне переднего автомобиля
Такой подход позволяет учесть состав ТП: если водитель, движется за автомобилем большого сечения, то для улучшения видимости выдерживает большую дистанцию.
При равномерном движении потока автомобилей расстояния между автомобилями выравниваются, и мы имеем устойчивое движение. Такое движение называют асимптотически устойчивым.
При движении потока с минимальными расстояниями между автомобилями образуются незатухающие колебания расстояний между ними. Движение становится колебательным.
Если в потоке имеют место кратковременные торможения отдельных автомобилей под действием внешних факторов, то движение не стабилизируется, образуются заторы. К образованию заторов приводит установка лишних светофорных объектов, оборудование чрезмерного числа пешеходных переходов, и др.
Теорию следования за лидером используют при расчете процесса разгона пачки автомобилей с перекрестка, при расчете заполнения очереди на перекрестке и др.
Теорию следования за лидером применяют при расследовании ДТП, в которых имело место столкновение автомобилей в пачке.
8.3. Макроскопические теории транспортного потока
В настоящее время разработаны различные математические модели плотных потоков, построенные на учете макроскопических явлений
~ 56 ~
Малюгин П.Н. МОДЕЛИРОВАНИЕ ДОРОЖНОГО ДВИЖЕНИЯ: учебное пособие
___________________________________________________________________________
[5], [6] и др. Для многих моделей разработано соответствующее программное обеспечение.
Гидродинамические модели
Гидродинамические модели относятся к типу моделей-аналогов Д. Дрю [5].
Транспортный поток представляют в виде сжимающейся жидкости, которая обладает одновременно свойствами жидкости и газа. Движение отдельных автомобилей не описывается. Используются общие параметры транспортного потока: плотность, интенсивность, скорость. Модели подразделяют на три класса: кинематические первого порядка; модели на уравнениях второго порядка; модели, построенные на кинетических уравнениях. Гидродинамические модели строятся с учетом и без учета инерции потока. Модели, учитывающие инерцию, строятся на уравнениях Навье-Стокса.
При построении гидродинамических моделей принимают два допущения: транспортный поток не разрывается; в потоке существует связь между скоростью и плотностью.
Закон сохранения (неразрывности) отражает следующее свойство: количество автомобилей, входящих в поток равно количеству автомобилей, выходящих из потока.
Связь между скоростью V и плотностью ρ потока принимают линейной:
V = Vmax (1 – ρ / ρmax),
где Vmax и ρmax – максимальная скорость и плотность потока.
Линейная зависимость V(ρ) положена в основу макроскопических моделей первого порядка Гриндшилдса и Гринберга (Greenshields B.D., Greenberg H.).
Развитием указанных выше моделей являются модели Лайтхилла– Уизема. В основу этих моделей положено основное уравнение транспортного потока (1.5). Модели позволяют описывать незатухающие кинематические волны, образующиеся в потоках. Суть кинематической волны заключается в том, что скорость потока или его частей непрерывно изменяется. Источниками образования волн являются изменения скоростей частей потока, вызванные внешними возмущениями.
~ 57 ~
Глава 8. МОДЕЛИРОВАНИЕ ПЛОТНЫХ ПОТОКОВ
_____________________________________________________________________________
Недостатком моделей Лайтхилла–Уизема является то, что они не позволяют описывать движение ТП на участках съезда, сужениях дороги и образование заторов.
При движении ТП иногда скорость отдельных пачек автомобилей, образующихся в ТП, становится равна нулю. Считают, что в таких случаях образуются ударные волны. Они отражаются разрывами в значениях плотности, интенсивности или скорости ТП. Разрывы описываются уравнениями, выражающими волны уплотнения в упругой среде. Они имеют кинематическое происхождение и их называют кинематическими волнами. Аналитическое решение уравнений, описывающих ударные волны, впервые было предложено Лайтхиллом и Уиземом. Однако из-за его сложности решение не используется в практических расчетах. На практике принимают связь между скоростью и плотностью линейной и решают уравнение ударной волны методом характеристик.
Модели первого порядка обладают известными недостатками: связь между скоростью и плотностью ТП устанавливается мгновенно; не описываются неустойчивые состояния ТП; не описываются явления гистерезиса (перехода ТП из неустойчивого состояния в устойчивое); не описывается движение ТП на участках съезда, сужениях и др.
Для устранения указанных недостатков Пейном (H.J. Payne ) предложено использовать дифференциальные уравнения динамики средней скорости. Это уравнение было выведено с помощью модели теории следования за лидером. Большей известностью и популярностью пользуется модель КК авторов B.S. Kerner, P. Konxauser В этой модели учитывается вязкость потока.
Модель КК позволяет описывать движение ТП при малых значениях плотности, а также движение ТП на участках с высокой плотностью (кластеров).
В последние годы наметился подход, в котором дополнительно используются «микроскопические» уравнения взаимодействия автомобилей друг с другом. Это позволяет рассчитывать средние параметры потока.
Кинематические модели
В кинематических моделях используются уравнения, описывающие динамику фазовой плотности потока [5]. Под фазовой плотностью понимают плотность распределения автомобилей по пути и по индиви-
~ 58 ~
Малюгин П.Н. МОДЕЛИРОВАНИЕ ДОРОЖНОГО ДВИЖЕНИЯ: учебное пособие
___________________________________________________________________________
дуальной скорости. Это позволяет рассчитывать макроскопические характеристики потока: плотность, скорость и интенсивность.
Кинематическое уравнение, описывающее изменение плотности по времени, впервые сформулировано И. Р. Пригожиным. Оно выражает закон неразрывности в фазовом пространстве. Уравнение учитывает быстрые изменения скоростей автомобилей при их взаимодействии друг с другом и релаксацию. Применяется гипотеза автомобильного хаоса, по которой скорости автомобилей в потоке после их взаимодействия не взаимосвязаны.
Развитием уравнения И.Р. Пригожина является уравнение ПавериФонтана (S.L. Paveri-Fontana). Оно содержит редуцированное уравнение, учитывающее желаемую скорость. В работах Хилбинга (D. Hilbing) уравнение модифицировано. Оно учитывает интенсивность взаимодействия быстрых автомобилей. Наиболее развитой считается модель GKT, разработанная авторами D. Helbing и M. Treiber , которую называют «Gaz-Kinetic Traffig model».
Основными недостатками кинематической модели считают неадекватность гипотезы автомобильного хаоса, неадекватность описания неоднородного ТП и отсутствие в расчетах параметров отдельных автомобилей.
Стохастические модели
Стохастические модели построены на методах теории массового обслуживания [2]. Эти методы позволяют рассматривать процессы накопления автомобилей по направлениям и рассчитывать длины очередей по направлениям. Областью применения таких моделей обычно являются регулируемые перекрестки.