

~ 50 ~
Малюгин П.Н. МОДЕЛИРОВАНИЕ ДОРОЖНОГО ДВИЖЕНИЯ: учебное пособие
___________________________________________________________________________
lj = f (ηа, jmax, αt, tр, V2),
где ηа –дополнительный коэффициент, учитывающий способность водителя заднего автомобиля чувствовать замедление.
Формула (8.4) позволяет учесть все особенности процесса торможения двух автомобилей. Полный вид функции поправки можно найти в работе Wohl M, Martin V. “Traffic System Analysis”. 1967 – 570 p.
При практическом применении основного уравнения необходимы значения 9 параметров. Они зависят от состава и скорости потока, состояния водителей, сцепления шин с дорогой и др. Значения параметров можно найти в специальной литературе.
Расстояния между двумя автомобилями, найденные по простой модели, распространяют на весь поток автомобилей. Такой подход нельзя считать корректным, так как не учитывается разнородность состава потока. На практике выполняют следующие действия:
–по формулам (8.3), (8.4) вычисляют расстояния для комбинаций разных моделей автомобилей;
–используя экспериментальные данные, находят по эмпирическим зависимостям те же расстояния для выбранных комбинаций;
–используют средние значения, полученные по расчетным и эмпирическим зависимостям.
8.2. Динамическая теория следования за лидером
Для расчета движения пачки автомобилей применяют динамическую теорию следования за лидером. В основу тории положена гипотеза: в плотном потоке взаимодействие автомобилей подчиняется некоторому закону и определяется движением первого автомобиля – лидера
[1], [5].
Пусть автомобили движутся в направлении, заданном переменной X, и процесс движения происходит по времени t, c. Автомобили нумеруем числами, начиная с 1 – для лидера. Положение автомобилей на магистрали задаем по оси OX координатами x1, x2, м (рис . 8.5). Скорости автомобилей v1, v2, м/с направляем по оси OX.
Учитываем длины автомобилей l1, l2, м (см. рис. 8.5). Пусть b, м – интервал безопасности между автомобилями. Пусть lр2, м – путь
автомобиля 2 за время реакции водителя τр, c.
~ 51 ~
Глава 8. МОДЕЛИРОВАНИЕ ПЛОТНЫХ ПОТОКОВ
_____________________________________________________________________________
Рис. 8.5. Расположение двух автомобилей в пачке
Путь второго автомобиля lр2 за время реакции водителя связываем со скоростью v2 и временем τр:
lр2 = v2 τр.
Координата x1 первого автомобиля является суммой координаты x2 второго автомобиля с расстояниями b, lр2, l1 (см. рис. 8.5). Запишем
формулу суммы, учитывая время реакции τр:
x1 = x2 + b + l1 + τр v2. |
(8.5) |
Дифференцируем сумму (1) по времени t, полагая, что время реакции τр и расстояния b и l1 являются постоянными:
x1 =x2 +τр x2.
Связываем производные со скоростями v1, v2 и ускорениями j1, j2 автомобилей:
v1 = x1; v2 = x2 ; j2 = x2 .
В результате получаем первое дифференциально уравнение теории следования за лидером:
j2 = (v1 – v2) /τр. |
(8.6) |
По теории следования за лидером второй автомобиль движется с ускорением прямо пропорциональным разности скоростей автомобилей и обратно пропорциональным времени реакции водителя. Водитель выполняет функцию регулятора, реагируя на разность скоростей. Для
~ 52 ~
Малюгин П.Н. МОДЕЛИРОВАНИЕ ДОРОЖНОГО ДВИЖЕНИЯ: учебное пособие
___________________________________________________________________________
водителя разность скоростей является внешним раздражением. Реакцией водителя на раздражение является ускорение (нажатие педали газ) или торможение (нажатие педали тормоз).
Исследованиями зарубежных ученых Д. Гейзис, Р. Герман и Р.
Потс [5], [6], установлено, что в формуле (8.6) время реакции τр не является постоянным. Оно зависит от средней скорости пары автомоби-
лей vП = (v1 + v2) / 2 и от расстояния между ними d = x1 – x2 – l1 – b (см. рис. 8.5). Поэтому вместо времени τр используют параметр реакции
водителя τ, c:
τ = d / vП; τ = 2 (x1 – x2 – l1 – b) / (v1 + v2). |
(8.7) |
Теперь легко видеть, что при большом расстоянии или низкой скорости водитель медленно реагирует на разность скоростей, а при малом расстоянии или высокой скорости – быстро.
Величину α, обратную времени реакции водителя, называют коэффициентом чувствительности водителя к разности скоростей:
α = 1 / τр.
Подставляем параметр τ из формулы (8.7) в формулу (8.5) и получаем уравнение
j2 = 0,5 VП (v1 – v2) (v1 + v2) / (x1 – x2 – l1 – b). |
(8.8) |
Уравнение (8.8) называют вторым (основным) уравнением теории
следования за лидером, в котором параметр τ является теперь переменным.
Используя уравнение (8.8), легко составить систему дифференциальных уравнений, описывающих движение пачки из числа n автомобилей:
j2 |
= 0,5 |
(v1 |
– v2) (v1 |
+ v2) / (x1 |
– x2 |
– l1 |
– b2); |
j3 |
= 0,5 |
(v2 |
– v3) (v2 |
+ v3) / (x2 |
– x3 |
– l2 |
– b3); |
j4 |
= 0,5 |
(v3 |
– v4) (v3 |
+ v4) / (x3 |
– x4 |
– l3 |
– b4); (8.9) |
………………..……………………………… |
|||||||
jn = 0,5 |
(vn – 1 – vn) (vn – 1 + vn) / (xn – 1 – xn – ln – 1 – bn). |
||||||
~ 53 ~
Глава 8. МОДЕЛИРОВАНИЕ ПЛОТНЫХ ПОТОКОВ
_____________________________________________________________________________
Система (8.9) состоит из числа n уравнений второго порядка. Для автомобиля номер k = 1, 2, …, n в уравнении участвует интервал безопасности bk и длина lk – 1 переднего автомобиля. Система описывает движение автомобилей в пачке, включая их остановку на расстояниях bk при полном торможении.
Однако формулы системы (8.9) не учитывают сцепных свойств дороги и тормозных свойств автомобилей. В таком виде система не пригодна для практического применения. Поэтому вводят ограничения на ускорения автомобилей по условиям движения и тормозным свойствам автомобилей.
Для интегрирования системы задают начальные условия, которыми являются начальные координаты xk и скорости vk автомобилей.
В методических указаниях [4] описаны подробно следующие положения, необходимые для расчета реального процесса торможения пачки автомобилей:
–учет сцепления и уклона участков магистрали;
–ограничение ускорений автомобиля по параметрам тормозных систем и сцеплению;
–выбор интервалов безопасности между автомобилями;
–расчет столкновений автомобилей;
–расчет пути автомобиля – лидера;
–расчет ограничений по времени реакции водителя.
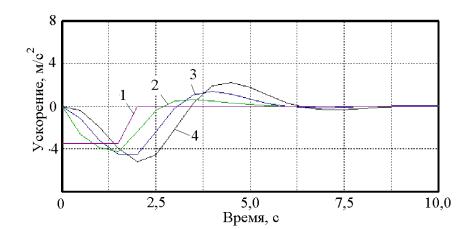
Рассмотрим пример расчета движения пачки из 4 автомобилей при служебном торможении первого автомобиля с замедлением 3,5 м/с2 в течение 1,5 с. Считаем, что первый автомобиль №1 за время 1,5 с снизил скорость и движется с этой скоростью равномерно. Время реакции водителя примем 0,5 с (рис. 8.6).
Рис. 8.6. Ускорения автомобилей при торможении лидера
~ 54 ~
Малюгин П.Н. МОДЕЛИРОВАНИЕ ДОРОЖНОГО ДВИЖЕНИЯ: учебное пособие
___________________________________________________________________________
Имеем следующие особенности:
водитель №2, тормозит с запаздыванием; наибольшее замедление равно 4,2 м/с2; после торможения водитель дает газ и разгоняет автомобиль, что сопровождается увеличением расхода топлива;
водитель автомобиля №3 тормозит с большим запаздыванием; наибольшее замедление равно 4,4 м/с2; для выравнивания скорости он разгоняет автомобиль с ускорением 1,2 м/с2;
водитель последнего автомобиля №4, тормозит с замедлением 5,1 м/с2; он разгоняет автомобиль с ускорением уже 2,8 м/с2, применяя небольшое торможение для достижения скорости потока.
Расчеты показывают, если передний автомобиль в течение 1,5 с тормозит с замедлением 5 м/с2, то последний автомобиль уже тормозит юзом.
В целом графики на рис. 8.6 отражают обычную работу водителей при движении в потоке.
Рассмотрим теперь пример разгона пачки из 4 автомобилей при разгоне переднего автомобиля с ускорением 2 м/с2 в течение 0,7 c со скорости 16,7 м/с до 20 м/с (рис. 8.7).
Водители автомобилей №2, №3, №4 нажимают на педаль «газ» с запаздыванием и автомобили движутся с ускорением, которое больше ускорения переднего автомобиля. Для выравнивания скоростей водители применяют замедление, которое можно получить при торможении двигателем.
Существует другой подход к определению коэффициента чувст-
вительности водителя α и времени реакции [2]. Он основан на том, что при движении по дороге водитель видит перед собой сечение Q нахо-
дящегося перед ним автомобиля. Коэффициент α связывают с площадью этого сечения и получают дифференциальное уравнение, аналогичное выше рассмотренному:
k |
* |
= m (xn+1 |
− xn − ∆) (xn+1 |
− xn ), |
(8.10) |
|
|
|
|
|
где k* = f (Q0) коэффициент пропорциональности; m > 1 – степень, учитывающая нелинейность зависимости площади Q от расстояния ∆ между автомобилями; Q0, м2 – лобовая площадь автомобиля (площадь Миделя).