

Министерство образования и науки российской Федерации Федеральное государственное бюджетное образовательное учреждение высшего образования
"Сибирский государственный автомобильно-дорожный университет (СибАДИ)"
П.Н. Малюгин
МОДЕЛИРОВАНИЕ ДОРОЖНОГО ДВИЖЕНИЯ
Учебное пособие
Омск • 2018
УДК 656.13. ББК 39.808.020.3
М74
Рецензенты:
канд. техн. наук, доц. И.П. Залознов (СибАДИ), канд. техн. наук, доц. И.М. Князев (СибАДИ)
Работа утверждена научно-методическим советом направления «Технология транспортных процессов» СибАДИ в качестве учебного пособия.
Малюгин, Павел Николаевич.
М74 Моделирование дорожного движения [Электронный ресурс] : учебное пособие / сост. П.Н. Малюгин – Электрон. дан. – Омск : СибАДИ, 2017. – URL: http://bek.sibadi.org/cgi-bin/irbis64r_plus/cgiirbis_64_ft.exe. - Режим доступа: для авторизованных пользователей.
ISBN 978-5-00113-088-8.
Содержит основные теоретические сведения о параметрах и свойствах транспортных потоков, законах распределения интервалов между автомобилями, динамической теории плотного потока, теории следования за лидером и макроскопической теории плотного потока.
Имеет интерактивное оглавление в виде закладок.
Рекомендуется обучающимся очной и заочной форм обучения направления «Технология транспортных процессов», а также магистрам и аспирантам.
Текстовое символьное издание (1 МБ)
Системные требования: Intel, 3,4 GHz; 150 МБ; Windows XP/Vista/7; DVD-ROM;
1 ГБ свободного места на жестком диске; программа для чтения pdf-файлов Addobe Acrobat Reader
Издание первое. Дата подписания к использованию 12.07.2018 Дата размещения на сайте ___________
Издательско-полиграфический комплекс СибАДИ. 644080, г. Омск, пр. Мира 5
РИО ИПК СибАДИ. 644080, г. Омск, ул. 2-я Поселковая, 1
ФГБОУ ВО «СибАДИ», 2018
~ 3 ~
___________________________________________________________________________
Введение
Вбазовой дисциплине «Моделирование дорожного движения» изучаются законы и теории, используемые для описания движения транспортных потоков (ТП), рассматриваются области их применения при решении различных задач организации дорожного движения.
Знания дисциплины необходимы для усвоения других специальных дисциплин: «Теория управления транспортными потоками», «Проек-тирование схем организации движения» и др.
Дисциплина создавалась известными Российскими учеными – В.В. Сильяновым, И.Н. Пугачевым, В.И. Швецовым и др., а также зарубежными учеными – Д. Дрю, Ф. Хейт, М. Bando, D.C. Gazis и др., для ее освоения обучающийся должен освоить дисциплины «Математика», «Механика», «Основы организации дорож-ного движения», «Основы безопасности дорожного движения».
Первая глава посвящена изучению параметров транспортных потоков. Знание параметров является основой для изучения законов и моделей транспортных потоков (ТП).
Во второй главе рассматриваются свойства транспортных потоков. Знание свойств ТП необходимо для ознакомления с областями применения законов и моделей потоков.
Втретьей главе изложен нормальный закон распределения. Закон применяется для описания распределения скоростей автомобилей в ТП
иинтервалов между автомобилями в плотном потоке.
Четвертая глава посвящена экспериментальным измерениям параметров распределения. Изложены термины и параметры, используемые при исследовании распределений скоростей и интервалов между автомобилями в ТП.
Впятой главе рассмотрено влияние различных факторов на скорость ТП.
Вшестой главе рассмотрено влияние различных факторов на интенсивность транспортного потока.
Седьмая глава посвящена изучению распределений интервалов между автомобилями в ТП. Изложены основные законы, применяемые для описания распределений интервалов между автомобилями в ТП различной интенсивности.
Ввосьмомй главе описаны модели, применяемые для описания плотных потоков. Изложена простая динамическая теория ТП и теория следования за лидером. Рассмотрены принципы построения макроскопической теории плотного потока.
~ 4 ~
___________________________________________________________________________
Глава 1. ПАРАМЕТРЫ ТРАНСПОРТНОГО ПОТОКА
Транспортный поток (ТП) образуется при движении по дороге автомобилей, взаимодействующих между собой. Основными параметра-
ми потока являются скорость V, интенсивность λ, плотность ρ. Параметры ТП являются средними (статистическими) его показа-
телями [2].
1.1. Скорость транспортного потока
Скорость V потока принято измерять в км/ч или в м/с. Чаще всего применяют единицу измерения км/ч. Скорость потока обычно измеряют в двух направлениях, а на многополосной дороге скорость измеряют в каждой полосе отдельно.
Для измерения скорости потока на дороге проводят сечения. Сечение дороги представляет собой условную линию, перпендикулярную оси дороги и проходящую через всю ее ширину.
Скорость ТП измеряют двумя методами: на участке или в сече-
нии [7].
По первому методу для измерения скорости необходимо иметь рулетку и секундомер. На дороге выделяют участок – отрезок дороги, заключенный между двумя сечениями. Длину участка l, м между сечениями выбирают таким образом, чтобы обеспечить приемлемую точность измерения скорости, ориентируясь на реальные условия движения. Секундомером измеряют время t, с прохождения автомобилями участка. Секундомер запускают при въезде автомобиля передним бампером на начало участка и останавливают при въезде передним бампером на конец участка. Измеренный интервал времени t называют вре-
менным интервалом.
Задают число измеряемых автомобилей n, измеряют интервалы времени ti для автомобилей номер i = 1, 2, …, n. Вычисляют средний временной интервал tс:
tc = ∑n ti / n. |
(1.1) |
i =1 |
|
Число n обычно выбирают в диапазоне от 50 до 100. По найденному среднему временному интервалу (1.1) вычисляют скорость потока:
~ 5 ~
Глава 1. ПАРАМЕТРЫ ТРАНСПОРТНОГО ПОТОКА
_____________________________________________________________________________
V =l / tc. |
(1.2) |
Она равна средней скорости движущихся автомобилей на участке и равна скорости ТП на участке.
По первому методу на дороге проводят одно сечение. Для измерения скорости ТП применяют дистанционные измерители скорости – радары. Они позволяют измерять скорость автомобиля в сечении с высокой точностью.
Измеряют скорости vi для числа n автомобилей и вычисляют по
ним среднюю скорость |
|
V = ∑n vi / n. |
(1.3) |
i =1 |
|
Она равна средней скорости автомобилей в сечении, равна скорости ТП
всечении, и теперь относится к конкретному месту дороги – сечению.
1.2. Интенсивность движения транспортного потока
Интенсивность движения λ равна числу автомобилей, проходящих сечение дороги за единицу времени. Интенсивность движения принято измерять в авт/час [2]. Иногда при высоких интенсивностях движения использует более короткие интервалы времени.
Интенсивность движения измеряется весьма просто: подсчитывают число автомобилей n, проходящих через сечение дороги за задан-
ную единицу времени T, затем вычисляют частное λ = n / T. При расчете частного интервал времени приводят к долям часа.
Иногда в технической литературе используют термины, связанные с интенсивностью движения:
объем движения, авт – число автомобилей, пересекших сечение дороги за заданную единицу времени;
часовой объем движения, авт – число автомобилей, прошедших через сечение дороги в течение часа.
1.3. Плотность транспортного потока
Плотность ТП отражает число автомобилей, расположенных на участке дороги заданной длины [2]. Обычно используют участки длиной 1 км и применяют единицу плотности авт/км.
~ 6 ~
Малюгин П.Н. МОДЕЛИРОВАНИЕ ДОРОЖНОГО ДВИЖЕНИЯ: учебное пособие
___________________________________________________________________________
Для измерения плотности ТП используют аэрофотосъемку, а также фотосъемку с высоких башен или высотных зданий. Результаты съемки обрабатывают, подсчитывая число автомобилей на участках известной длины.
Часто плотность ТП не измеряют, а рассчитывают по скорости и интенсивности движения, используя основное уравнение транспортного потока. Основное уравнение будет рассмотрено ниже.
Плотность ТП связана с интервалами между автомобилями.
Измеряют пространственные интервалы lП, м между двумя,
следующими друг за другом автомобилями. Интервал равен расстоянию между их передними бамперами. По ним вычисляют среднее значение.
Средний пространственный интервал lПС, м равен среднему значению интервалов lП на выбранном участке. Иногда интервал lПС измеряют в метрах на один автомобиль.
Располагая плотностью ρ потока легко вычислить средний
пространственный интервал в потоке: |
|
lПС = 1000 / ρ. |
(1.4) |
1.4. Основное уравнение транспортного потока
Основное уравнение связывает между собой три параметра ТП – скорость V, интенсивность λ, плотность [2]:
λ = V ρ. |
(1.5) |
На первый взгляд параметры в уравнении являются независимыми друг от друга. Однако при движении ТП параметры связаны между собой, так как автомобили взаимодействуют друг с другом. Например, интенсивность ТП мало увеличится, если разрешить автомобилям двигаться на участке с большей скоростью. А на некоторых участках интенсивность при этом будет снижаться, что противоречит формуле
(1.5).
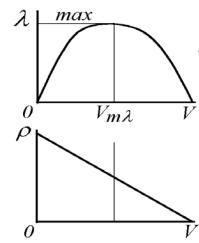
Поэтому рассмотрим экспериментальную зависимость интенсивности λ от скорости, показанную на рис. 1.1.
~ 7 ~
Глава 1. ПАРАМЕТРЫ ТРАНСПОРТНОГО ПОТОКА
_____________________________________________________________________________
Сначала, при небольшой скорости V ее увеличение мало влияет на
плотность потока ρ и приводит почти к линейному росту интенсивности движения (см. рис. 1.1, а).
Затем при большей скорости рост интенсивности замедляется и
потом вообще прекращается: интенсивность λ достигает максимального значения (см. рис. 1.1, а). Скорость, при которой образуется макси-
мум, обычно обозначают символом Vmλ.
Далее с ростом скорости интенсивность снижается и становится малой величины (см. рис. 1.1, а).
При этом эксперименты указывают на то, что с ростом скорости плотность потока уменьшается по линейной зависимости (см. рис. 1.1, б). То есть основное уравнение ТП остается справедливым.
Экспериментальные данные становятся понятными, если учесть, что тормозной путь S автомобиля зависит от квадрата скорости:
S = V02 / (2 j),
где V0 – начальная скорость, j – замедление автомобиля. При увеличении скорости водители вынуждены пропорционально квадрату скорости увеличивать пространственные интервалы для обеспечения безопасности движения. В результате плотность ТП снижается и снижается интенсивность.
а
Рис. 1. Взаимосвязь между интенсивностью, |
|
скоростью и плотностью ТП: |
|
а − зависимость интенсивности ТП от скорости; |
|
б − зависимость плотности ТП от скорости |
б |
|
Таким образом, при увеличении скорости потока улучшается удобство движения, но снижается интенсивность. Однако
целью управления движением является достижение максимальной интенсивности транспортных потоков, а не скорости.