

mmt-02
.pdfВыделимвектора в теле двеOпроизвольные точки с радиус
~r1 è ~r2. При поступательном движении вектор
~r12 оста¼тся постоянным.
|
t = ta |
t = tb |
|
~r12 |
|
|
|
~r12 |
~r1(ta) |
~r2(ta) |
~r1(tb) |
|
~r2(tb)
O
d
~r2 = ~r1 + ~r12 ~v2 = ~v1dt
d
~v2 = ~v1 ~a2 = ~a1dt
движениеПоступатВидыпостояускорениемДвижетангенцÎïУравнения¼рдогоðåäдвиженымëальноетелаíèåëüñ íîåèÿ
поступатиса льного
Вращениедвижеòâ¼îêавноускоренноеугого тела
âåподвижнойвокругîñè
угСвязьлинейнымиовымиежду ичинами17/35

Выделимвектора в теле двеOпроизвольные точки с радиус
~r1 è ~r2. При поступательном движении вектор
~r12 оста¼тся постоянным.
|
t = ta |
t = tb |
|
~r12 |
|
|
|
~r12 |
~r1(ta) |
~r2(ta) |
~r1(tb) |
|
~r2(tb)
O
d
~r2 = ~r1 + ~r12 ~v2 = ~v1dt
d
~v2 = ~v1 ~a2 = ~a1dt
движениеПоступатВидыпостояускорениемДвижетангенцÎïУравнения¼рдогоðåäдвиженымëальноетелаíèåëüñ íîåèÿ
поступатиса льного
Вращениедвижеòâ¼îêавноускоренноеугого тела
âåподвижнойвокругîñè
угСвязьлинейнымиовымиежду ичинами17/35

Выделимвектора в теле двеOпроизвольные точки с радиус
~r1 è ~r2. При поступательном движении вектор
~r12 оста¼тся постоянным.
|
t = ta |
t = tb |
|
~r12 |
|
|
|
~r12 |
~r1(ta) |
~r2(ta) |
~r1(tb) |
|
~r2(tb)
O
d
~r2 = ~r1 + ~r12 ~v2 = ~v1dt
d
~v2 = ~v1 ~a2 = ~a1dt
движениеПоступатВидыпостояускорениемДвижетангенцÎïУравнения¼рдогоðåäдвиженымëальноетелаíèåëüñ íîåèÿ
поступатиса льного
Вращениедвижеòâ¼îêавноускоренноеугого тела
âåподвижнойвокругîñè
угСвязьлинейнымиовымиежду ичинами17/35

Ìûточкиодинаковыеполучили,тв¼рдогоскорости÷òîòåëàïðèимеютпоступательномускорения,в любой такжемоментизвестныдвижениираекторвремениâñåè.
Таким образом, поступательное движение в¼рдого тела может быть полностью описано, если
положениезависимостьтелаот времениначальный~r(t) любоймоментточкивременитела. и
тангенцДвижеускорениемпостояВидыдвижение¼рдогодвиженымальноетелас íèÿ
Поступатðåä ë ëüíèåîå
Вращениетв¼СвязьлинейнымиугвеУравненияÎïпоступатдвижеîêавноускоренноеподвижнойовымиичинамиèñàугогоеждутелавокругльногоîñè
18/35

Ìûточкиодинаковыеполучили,тв¼рдогоскорости÷òîòåëàïðèимеютпоступательномускорения,в любой такжемоментизвестныдвижениираекторвремениâñåè.
Таким образом, поступательное движение в¼рдого тела может быть полностью описано, если
положениезависимостьтелаот времениначальный~r(t) любоймоментточкивременитела. и
тангенцДвижеускорениемпостояВидыдвижение¼рдогодвиженымальноетелас íèÿ
Поступатðåä ë ëüíèåîå
Вращениетв¼СвязьлинейнымиугвеУравненияÎïпоступатдвижеîêавноускоренноеподвижнойовымиичинамиèñàугогоеждутелавокругльногоîñè
18/35

|
тангенц альное |
|
|
ускорениемпостояДвиже ным |
|
5. Вращение тв¼рдого тела вокруг |
иды движе ия |
|
тв¼Вращениед ижениеого телаíîå |
||
неподвижной оси |
||
|
Поступательне äвижной оси |
|
|
âîê óã |
|
|
ОпределениеН авление |
|
|
Вектор |
|
|
приращен я угла |
|
|
ускорениескорость |
|
|
Угловаяóск рениявокруг |
|
|
углинейнымиСвязьращениеподвижнойовы ежду |
|
|
âîãî |
|
|
авноускоренноеоси |
|
|
âåëичинами19/35 |
которымкружностям, центры которыхтв¼рдоголежатОкружности,на одной ïрямой, называемойточкисью вращения. по
ÂÏðèащениетаком движениивокруг неподвижнойâñå ÷êè îñè тела дв гаются
двигаются тела, лежат плоскостях, ерпендикулярных оси.
тв¼ВращениеäпостояПоступательускорениемДвижетангенцидыижениеîãîдвиженымальноеòåëàíèÿ
линейнымиСвязьуг овыичинамиежду20/35
âîêОпределениеäóã îå не вижной оси Векторприращенускорениея угла Угловая скорость Нóращениеск рениявогоавлениеâåëавноускоренноеподвижнойвокругоси
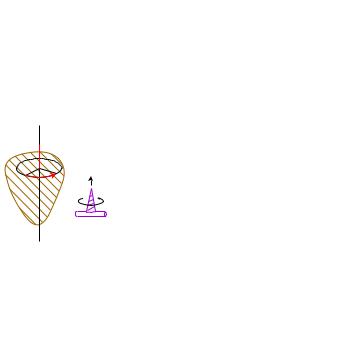
неподвижнаПусть тв¼рдое выбраннойтело вращаетñèñòåìåя вокругîòñ÷¼òàîñè .OO′, которая
бесконечЗа ечно малое времяO′
 d~ϕ
d~ϕ
O
í малый угол dt тело поворачивается на
d~ϕ.
невоктв¼ВращениедпостояПоступательускорениемДвижетангенцОпределениеидыижениеäугоговижнойдвиженымальноетелаíоеияоси
Векторприращенускорениея угла Угловая скорость Нóращениеск рениявогоавлениеâåëавноускоренноеподвижнойвокругоси
Связьлинейнымиуг овыичинамиежду21/35

неподвижнаПусть тв¼рдое выбраннойтело вращаетñèñòåìåя вокругîòñ÷¼òàîñè .OO′, которая
бесконечЗа ечно малое времяO′
 d~ϕ
d~ϕ
O
í малый угол dt тело поворачивается на
d~ϕ.
невоктв¼ВращениедпостояПоступательускорениемДвижетангенцОпределениеидыижениеäугоговижнойдвиженымальноетелаíоеияоси
Векторприращенускорениея угла Угловая скорость Нóращениеск рениявогоавлениеâåëавноускоренноеподвижнойвокругоси
Связьлинейнымиуг овыичинамиежду21/35
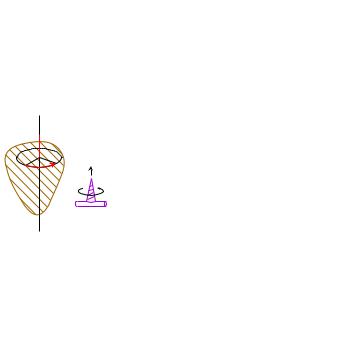
направлениидвижение нтавращениядаст направлениеd~ϕтела, то поступательноевектора.
Вектор è являются Oолько′ бесконечно м лые
 d~ϕ
d~ϕ
O
~
óãëûïðавиламиращеннельзясложениярассматриватьуглаdφ,векторовак каккак.этиПоворотывекторвеличины.на пкîдчинечíыеяются
тв¼ВращениедпостояПоступательускорениемДвижетангенцидыижениеогодвиженымальноетелаíîåèÿ
вокнеОпределениеäугвижной оси Векторприращенускорениея угла Угловая скорость Нóращениеск рениявогоавлениеâåëавноускоренноеподвижнойвокругоси
Связьлинейнымиуг овыичинамиежду22/35