

mmt-02
.pdfперпендикулярно,Этот вектор напраâленполучили:силу~n = нормалиd~τ/|d~τ| к траектории (т. е.
Вспомним, что мы d~τ ~τ) к центру крив зны.
В итоге имеем: ds = ρdα, |d~τ| = dα
ds = ρdα = ρ|d~τ|, d~τ = |d~τ|~n
d~τ |d~τ|~n ~n ds = = ρ ρ|d~τ|
тв¼ВращениедпостояПоступательускорениемДвижетангенцокидыподвижнойижениеугогодвиженымальноетелаíîåèÿîñè
âåавноускоренноевокруг Связьуглинейнымиовымиежду
ичинами7/35
перпендикулярно,Этот вектор напраâленполучили:силу~n = нормалиd~τ/|d~τ| к траектории (т. е.
Вспомним, что мы d~τ ~τ) к центру крив зны.
В итоге имеем: ds = ρdα, |d~τ| = dα
ds = ρdα = ρ|d~τ|, d~τ = |d~τ|~n
d~τ |d~τ|~n ~n ds = = ρ ρ|d~τ|
тв¼ВращениедпостояПоступательускорениемДвижетангенцокидыподвижнойижениеугогодвиженымальноетелаíîåèÿîñè
âåавноускоренноевокруг Связьуглинейнымиовымиежду
ичинами7/35

перпендикулярно,Этот вектор напраâленполучили:силу~n = нормалиd~τ/|d~τ| к траектории (т. е.
Вспомним, что мы d~τ ~τ) к центру крив зны.
В итоге имеем: ds = ρdα, |d~τ| = dα
ds = ρdα = ρ|d~τ|, d~τ = |d~τ|~n
d~τ |d~τ|~n ~n ds = = ρ ρ|d~τ|
тв¼ВращениедпостояПоступательускорениемДвижетангенцокидыподвижнойижениеугогодвиженымальноетелаíîåèÿîñè
âåавноускоренноевокруг Связьуглинейнымиовымиежду
ичинами7/35

~a = |
d~v |
= |
|
d |
(v~τ) = ~τ |
dv |
+v |
d~τ |
= ~τ |
dv |
+v |
2 d~τ |
= ~τ |
dv |
+~n |
v2 |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
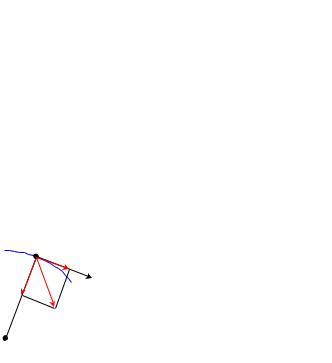
тангенциальнойвекторнойОтсюдаdt видно,dtсуммычто(касательной)двухускореdtортогональиеdt ìîæídtыхо представитькомпонент,ds dtâ âèäåρ |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
aτ и нормальной an: |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
p |
|
|
|
|
|
|
|
|
|
|
|
|
~a = ~τaτ + ~nan, |~a| = a = |
|
|
aτ2 + an2 , |
|
|
|
||||||||||||||
|
|
|
|
|
aτ = dt |
|
, an = |
|
|
2 |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
ρ |
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
dv |
|
|
|
v |
|
|
|
|
|
|
|
|
|
|
|
тв¼ВращениедпостояПоступательускорениемДвижетангенцокидыижениеугогодвиженымальноетелаíîåèÿ
âåавноускоренноеподвижнойвокругîñè Связьуглинейнымиовымиежду
ичинами8/35

~a = |
d~v |
= |
|
d |
(v~τ) = ~τ |
dv |
+v |
d~τ |
= ~τ |
dv |
+v |
2 d~τ |
= ~τ |
dv |
+~n |
v2 |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
тангенциальнойвекторнойОтсюдаdt видно,dtсуммычто(касательной)двухускореdtортогональиеdt ìîæídtыхо представитькомпонент,ds dtâ âèäåρ |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
aτ и нормальной an: |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
p |
|
|
|
|
|
|
|
|
|
|
|
|
~a = ~τaτ + ~nan, |~a| = a = |
|
|
aτ2 + an2 , |
|
|
|
||||||||||||||
|
|
|
|
|
aτ = dt |
|
, an = |
|
|
2 |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
ρ |
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
dv |
|
|
|
v |
|
|
|
|
|
|
|
|
|
|
|
тв¼ВращениедпостояПоступательускорениемДвижетангенцокидыижениеугогодвиженымальноетелаíîåèÿ
âåавноускоренноеподвижнойвокругîñè Связьуглинейнымиовымиежду
ичинами8/35

~a = |
d~v |
= |
|
d |
(v~τ) = ~τ |
dv |
+v |
d~τ |
= ~τ |
dv |
+v |
2 d~τ |
= ~τ |
dv |
+~n |
v2 |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
тангенциальнойвекторнойОтсюдаdt видно,dtсуммычто(касательной)двухускореdtортогональиеdt ìîæídtыхо представитькомпонент,ds dtâ âèäåρ |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
aτ и нормальной an: |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
p |
|
|
|
|
|
|
|
|
|
|
|
|
~a = ~τaτ + ~nan, |~a| = a = |
|
|
aτ2 + an2 , |
|
|
|
||||||||||||||
|
|
|
|
|
aτ = dt |
|
, an = |
|
|
2 |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
ρ |
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
dv |
|
|
|
v |
|
|
|
|
|
|
|
|
|
|
|
тв¼ВращениедпостояПоступательускорениемДвижетангенцокидыижениеугогодвиженымальноетелаíîåèÿ
âåавноускоренноеподвижнойвокругîñè Связьуглинейнымиовымиежду
ичинами8/35
~a = |
d~v |
= |
|
d |
(v~τ) = ~τ |
dv |
+v |
d~τ |
= ~τ |
dv |
+v |
2 d~τ |
= ~τ |
dv |
+~n |
v2 |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
тангенциальнойвекторнойОтсюдаdt видно,dtсуммычто(касательной)двухускореdtортогональиеdt ìîæídtыхо представитькомпонент,ds dtâ âèäåρ |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
aτ и нормальной an: |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
p |
|
|
|
|
|
|
|
|
||
|
|
|
~a = ~τaτ + ~nan, |~a| = a = |
|
|
|
aτ2 + an2 , |
|
|
|
|||||||||||||||
|
|
|
|
|
aτ = dt |
|
, an = |
|
|
2 |
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
ρ |
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
dv |
|
|
|
|
v |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
~an |
|
|
|
|
|
~aτ |
~v |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ρ |
|
|
|
~a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
O |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
тв¼ВращениедпостояПоступательускорениемДвижетангенцокидыижениеугогодвиженымальноетелаíîåèÿ
âåавноускоренноеподвижнойвокругîñè Связьуглинейнымиовымиежду
ичинами8/35

|
тангенц альное |
|
|
успостояДвижеениемнымс |
|
2. Движение с постоянным ускорением |
Ñêîð ñòü ïðè |
|
движенииравноускорПе емещениеíîìïðè |
||
|
иды движе ия |
|
|
тв¼дПоступательижениеого тела |
|
|
Вращениеîê óã |
вокруг |
|
авноускоренноеоси |
|
|
Связьподвижнойåæäó |
|
веуглинейнымиовымиичинами9/35

~a = CONST |
|
|
~v = |
d~r |
~vdt = d~r |
|
||
dt |
||
~r1 t1 |
t1 |
|
Нужно узнать, как скорость зависит от времени при |
||||||
Z |
~r = Z ~vdt |
~r1 = ~r0 + Z |
~vdt |
|||
~r0 |
|
t0 |
|
t0 |
|
|
~a = CONST: |
|
|
|
|
|
|
|
|
~a = |
d~v |
~adt = ~v |
|
|
|
dt |
|
||||
|
|
|
|
|
|
|
~v1 |
|
t1 |
|
t1 |
|
|
Z |
~v = Z ~adt |
~v1 = ~v0 + Z |
~adt |
|||
~v0 |
|
t0 |
|
t0 |
|
|
|
|
|
|
|
||
|
|
~v1 = ~v0 + ~a(t1 − t0) |
|
|
||
|
|
|
|
|
|
|
успостояДвижетангенцдвиженииравноускорПеСкоремещениеениемдвижеñòüнымальноеïðèñ èÿíîìïðè
Вращениетв¼давноускоренноеèäûижениеого тела
Поступатель îêподвижнойóã îñè
âå вокруг угСвязьлинейнымиовымиежду
ичинами10/35

~a = CONST |
|
|
~v = |
d~r |
~vdt = d~r |
|
||
dt |
||
~r1 t1 |
t1 |
|
Нужно узнать, как скорость зависит от времени при |
||||||
Z |
~r = Z ~vdt |
~r1 = ~r0 + Z |
~vdt |
|||
~r0 |
|
t0 |
|
t0 |
|
|
~a = CONST: |
|
|
|
|
|
|
|
|
~a = |
d~v |
~adt = ~v |
|
|
|
dt |
|
||||
|
|
|
|
|
|
|
~v1 |
|
t1 |
|
t1 |
|
|
Z |
~v = Z ~adt |
~v1 = ~v0 + Z |
~adt |
|||
~v0 |
|
t0 |
|
t0 |
|
|
|
|
|
|
|
||
|
|
~v1 = ~v0 + ~a(t1 − t0) |
|
|
||
|
|
|
|
|
|
|
успостояДвижетангенцдвиженииравноускорПеСкоремещениеениемдвижеñòüнымальноеïðèñ èÿíîìïðè
Вращениетв¼давноускоренноеèäûижениеого тела
Поступатель îêподвижнойóã îñè
âå вокруг угСвязьлинейнымиовымиежду
ичинами10/35