

mmt-02
.pdfтв¼рдогоВыделяютвращениепоступаттеладвальное;вокругосновныхнеподвижной(простых) îñèâèäà. движения
Также можно выделипредставитьещ¼ три вида движения, которплоскоеû можно в виде совокупности двух прост х движений:
движение; свободноеижение вокруг неподвижной точки;
движение.
тв¼рдогоВидыпостояПоступательноеускорениемДвижетангенцДвижениеäâнымальноетелажения
абтв¼рдогоолютнотела äÂижениеды движения òâ¼Вращениеок угîãî телаавноускоренноеподвижной оси âå вокруг угСвязьлинейнымиовымиежду
ичинами14/35

тв¼рдогоВыделяютвращениепоступаттелаäâàльное;вокругосновныхнеподвижной(простых) îñèâèäà. движения
Также можно выделипредставитьещ¼ три вида движения, которû можно виде совокупности двух прост х движений:
плоское движение; свободноеижение вокруг неподвижной точки;
движение.
тв¼рдогоВидыпостояПоступательноеускорениемДвижетангенцДвижениеäâнымальноетелажения
абтв¼рдогоолютнотела äÂижениеды движения òâ¼Вращениеок угîãî телаавноускоренноеподвижной оси âå вокруг угСвязьлинейнымиовымиежду
ичинами14/35
тв¼рдогоВыделяютвращениепоступаттелаäâàльное;вокругосновныхнеподвижной(простых) îñèâèäà. движения
Также можно выделипредставитьещ¼ три вида движения, которплоскоеû можно виде совокупности двух прост х движений:
движение; свободноеижение вокруг неподвижной точки;
движение.
тв¼рдогоВидыпостояПоступательноеускорениемДвижетангенцДвижениеäâнымальноетелажения
абтв¼рдогоолютнотела äÂижениеды движения òâ¼Вращениеок угîãî телаавноускоренноеподвижной оси âå вокруг угСвязьлинейнымиовымиежду
ичинами14/35

тв¼рдогоВыделяютвращениепоступаттелаäâàльное;вокругосновныхнеподвижной(простых) îñèâèäà. движения
Также можно выделипредставитьещ¼ три вида движения, которплоскоеû можно виде совокупности двух прост х движений:
движение; свободноед ижение вокруг неподвижной точки;
движение.
тв¼рдогоВидыпостояПоступательноеускорениемДвижетангенцДвижениеäâнымальноетелажения
абтв¼рдогоолютнотела äÂижениеды движения òâ¼Вращениеок угîãî телаавноускоренноеподвижной оси âå вокруг угСвязьлинейнымиовымиежду
ичинами14/35

тв¼рдогоВыделяютвращениепоступаттелаäâàльное;вокругосновныхнеподвижной(простых) îñèâèäà. движения
Также можно выделипредставитьещ¼ три вида движения, которплоскоеû можно виде совокупности двух прост х движений:
движение; свободноеижение вокруг неподвижной точки;
движение.
тв¼рдогоВидыпостояПоступательноеускорениемДвижетангенцДвижениеäâнымальноетелажения
абтв¼рдогоолютнотела äÂижениеды движения òâ¼Вращениеок угîãî телаавноускоренноеподвижной оси âå вокруг угСвязьлинейнымиовымиежду
ичинами14/35

4. Поступательное движение |
Движетангенцíûìальноеñ |
|
постояВидыускорением¼рдогодвижетелаия |
||
|
движениеПоступат льíîå |
|
|
ðåä ë íèå |
|
|
Îïèñà |
|
|
поступат льного |
|
|
Уравнениядвиже |
|
|
òâ¼ îãî òåëà |
|
|
Вращениеîê óã |
вокруг |
|
авноускоренноеоси |
|
|
Связьподвижнойåæäó |
|
веуглинейнымиовымиичинами15/35

ÂПоступательноеñвязаннаяходе такогос телом,движенияколесад ижение¼ времялюбаяоста¼тсяпряма ,параллельнойж¼стко
àìîé ñåáå.
Пример: кабина обозрения, автомобиль, движущийся по прямой.
движениеВидыпостояускорениемДвижетангенц¼рдогодвиженымальноетелас íèÿ
Поступатðåä ë íèåëü îå ÎïУравненияпоступатиса льного
Вращениедвижеòâ¼îêавноускоренноеугого тела
âåподвижнойвокругîñè
угСвязьлинейнымиовымиежду ичинами16/35
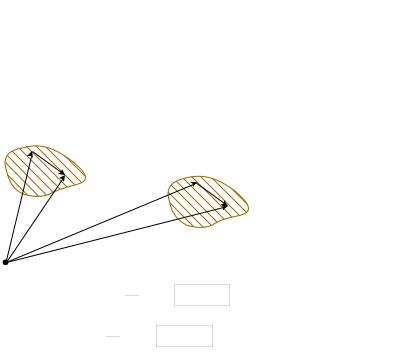
Выделимвектора в теле двеOпроизвольные точки с радиус
~r1 è ~r2. При поступательном движении вектор
~r12 оста¼тся постоянным.
|
t = ta |
t = tb |
|
~r12 |
|
|
|
~r12 |
~r1(ta) |
~r2(ta) |
~r1(tb) |
|
~r2(tb)
O
d
~r2 = ~r1 + ~r12 ~v2 = ~v1dt
d
~v2 = ~v1 ~a2 = ~a1dt
движениеПоступатВидыпостояускорениемДвижетангенцÎïУравнения¼рдогоðåäдвиженымëальноетелаíèåëüñ íîåèÿ
поступатиса льного
Вращениедвижеòâ¼îêавноускоренноеугого тела
âåподвижнойвокругîñè
угСвязьлинейнымиовымиежду ичинами17/35
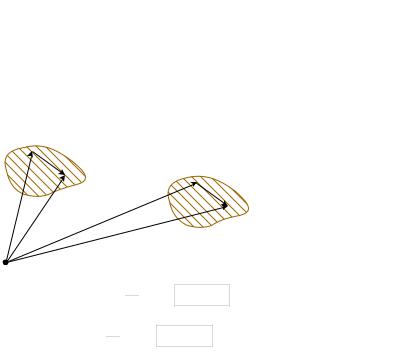
Выделимвектора в теле двеOпроизвольные точки с радиус
~r1 è ~r2. При поступательном движении вектор
~r12 оста¼тся постоянным.
|
t = ta |
t = tb |
|
~r12 |
|
|
|
~r12 |
~r1(ta) |
~r2(ta) |
~r1(tb) |
|
~r2(tb)
O
d
~r2 = ~r1 + ~r12 ~v2 = ~v1dt
d
~v2 = ~v1 ~a2 = ~a1dt
движениеПоступатВидыпостояускорениемДвижетангенцÎïУравнения¼рдогоðåäдвиженымëальноетелаíèåëüñ íîåèÿ
поступатиса льного
Вращениедвижеòâ¼îêавноускоренноеугого тела
âåподвижнойвокругîñè
угСвязьлинейнымиовымиежду ичинами17/35

Выделимвектора в теле двеOпроизвольные точки с радиус
~r1 è ~r2. При поступательном движении вектор
~r12 оста¼тся постоянным.
|
t = ta |
t = tb |
|
~r12 |
|
|
|
~r12 |
~r1(ta) |
~r2(ta) |
~r1(tb) |
|
~r2(tb)
O
d
~r2 = ~r1 + ~r12 ~v2 = ~v1dt
d
~v2 = ~v1 ~a2 = ~a1dt
движениеПоступатВидыпостояускорениемДвижетангенцÎïУравнения¼рдогоðåäдвиженымëальноетелаíèåëüñ íîåèÿ
поступатиса льного
Вращениедвижеòâ¼îêавноускоренноеугого тела
âåподвижнойвокругîñè
угСвязьлинейнымиовымиежду ичинами17/35