

Метод вариационного исчисления при решении задач оптимального управления
При создании САУ стремятся получить систему наилучшую в каком-либо смысле. Оптимальная система характеризуется критерием оптимальности, выраженным некоторым функционалом
С помощью метода вариационного исчисления определяется значение х, минимизирующее интеграл Q. Найти эту зависимость х(t) можно на основе уравнения Эйлера


Если Q
зависит от нескольких функций х и
переменной t
 то
варьируется одна из переменных остальные
остаются постоянными
то
варьируется одна из переменных остальные
остаются постоянными

Составляется система уравнений и определяется семейство экстремали
Для решения задачи оптимального управления, при наличии ограничений, накладываемых на фазовые координаты, применяют принцип максимума, предложенный академиком Л.С. Понтрягиным
Геометрическая интерпретация метода
П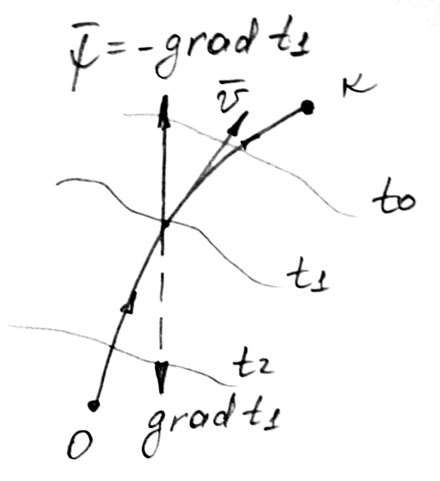 усть
необходимо привести за минимальное
время из точки О в точку К изображающую
точку. Тогда каждой точке этого
пространства, окружающего току к,
соответствует оптимальная траектория
и минимальное время перехода в точку
к, т.е. вокруг точки К можно построить
поверхности, являющиеся геометрическим
местом точек с одинаковым минимальным
временем перехода в точку К. такие
поверхности называются изохронами.
усть
необходимо привести за минимальное
время из точки О в точку К изображающую
точку. Тогда каждой точке этого
пространства, окружающего току к,
соответствует оптимальная траектория
и минимальное время перехода в точку
к, т.е. вокруг точки К можно построить
поверхности, являющиеся геометрическим
местом точек с одинаковым минимальным
временем перехода в точку К. такие
поверхности называются изохронами.
Тогда оптимальная по быстродействию траектория перехода должна быть близка к нормалям, указанным изохронами
Математическое условие оптимальности
Состоит в том, что на
протяжении всей траектории скалярное
произведение вектора v=dx/dt
на вектор обратный вектору градиента
времени
 =-grad
t1 должно
быть максимально
=-grad
t1 должно
быть максимально

 -
функция Гамильтона
-
функция Гамильтона
Т.е. должен быть максимум проекции пси на вектор v, т.е. угол должен быть равен 0.
Практические методика поиска оптимального закона управления не требует построения изохром. Пусть объект описывается систему ДУ

А на управление наложено ограничение|u|< 1, тогда функция

Функция достигает максимум по управления u при u=+1, когда больше и u=-1 когда меньше. При этом необходимо рассматривать отдельные участки фазовой траектории, для каждой из которых значение функции ψ различны и зависят от ограничений, накладываемых на фазовые координаты. Так если вектор состояния Х не должен выходить за пределы области Д, то для участков траекторий внутри этой области действует уравнение

Для участков находящихся на поверхности области

Добавка вектор Р по х, представляет собой оставляющую скорости изображающей точки нормальную поверхности Д

При движении изображающей
точки по Д P(x, u)=0. В точке стыковки
отдельных участков траектории - значение сопряженного вектора
справа
и слева от точки стыковки в момент
времени
- значение сопряженного вектора
справа
и слева от точки стыковки в момент
времени
 .
Максимальное число скачков (переключениях
управляющего воздействия) получатся в
том случае, если все ограниченные
координаты по очереди достигают своих
предельных значений. Формально это
число скачков определяется
.
Максимальное число скачков (переключениях
управляющего воздействия) получатся в
том случае, если все ограниченные
координаты по очереди достигают своих
предельных значений. Формально это
число скачков определяется

m - число скачков
n - порядок системы
p, k, j, q – порядок ДУ, связывающих ограниченные координаты с управляющей величиной
Пример
Найти оптимальное по быстродействие управление разгоном ДПТ при работе его на ХХ имеющего следующие параметры:
Тм – электромеханическая постоянная времени, с
Iн А, Ra Oм, Um В
β– коэффициент преобразователя


Преобразуем схему


Найдем число скачков переключений

р - порядок ДУ связывающий выходную координату х2 (р=2)
Таким образом, процесс разбивается на 3 интервала:
Двигатель подключается к преобразователю с максимальным напряжением. Ток растет до значения Im т.е. до х2m
При токе равном максимальному и х2=х2m двигатель разгоняется на предельном токе синхронно со скоростью необходимо увеличивать ЭДС преобразователя, оставляя постоянной величиной Еп-Е
Для основного двигателя при заданной скорости преобразовать реверсирует напряжения на обратное максимальное значение, идет интенсивное торможение двигателя и его останов
1 и 3 интервалы управления лежат внутри области Д, а 2 на ее поверхности.

Для 1 и 3 интервалов траектории функции Гамильтона имеет виды

Экстремум определяется частной производной. При
этом для получения положительного
максимума при
определяется частной производной. При
этом для получения положительного
максимума при
 > 0 Еп=+Епн
а при
<
0 Еп=1. Т.е. Еп
изменяется по закону:
> 0 Еп=+Епн
а при
<
0 Еп=1. Т.е. Еп
изменяется по закону:

Внутри области Д (для 1 и 3 интервалов) сопряженные функции имеют вид

Для 2 интервала (на поверхности области Д)


При движении изображающей
точки по поверхности Д ее скорость
направлена по касательной при этом .
Таким образом, оптимальное управление
может быть выражено следующим соотношением
.
Таким образом, оптимальное управление
может быть выражено следующим соотношением

 –
время ПП на 3 интервале
–
время ПП на 3 интервале
К моменту переключения определяются по графикам ПП при заданном управлении. Для 1 интервала (Еп=Епн)

 –
корни ХУ
–
корни ХУ

Для определения
 на
первом интервале (
на
первом интервале ( )
соотношение (2) надо вставить вместо
)
соотношение (2) надо вставить вместо
 и определяем Т1 и поставляем
в (1) и определяем
и определяем Т1 и поставляем
в (1) и определяем
На 3 интервале рассматривается так называемое попятное движение, т.е. движение из точки соответствующей концу разгона при обратном течении времени

Из соотношения (5)
определяем
 ,
приняв
,
подставив полученные значения
в
(4) и определяем
,
приняв
,
подставив полученные значения
в
(4) и определяем
 –
приращение скорости на 3 интервале
–
приращение скорости на 3 интервале
Время движения на 2 интервале определяется

