

Многодвигательный эп с индивидуальными преобразователями
Каждая секция приводится одним или несколькими двигателями, имеющими индивидуальный тиристорный преобразователь. Стабилизация скорости и соотношение скоростей определяются по принципу подчиненного регулирования, используется ПИ регуляторы тока и скорости. Управление соотношением скоростей обеспечивается секционными потенциометрами, изменяющими необходимое добавочное напряжение по отношению к общему задающему
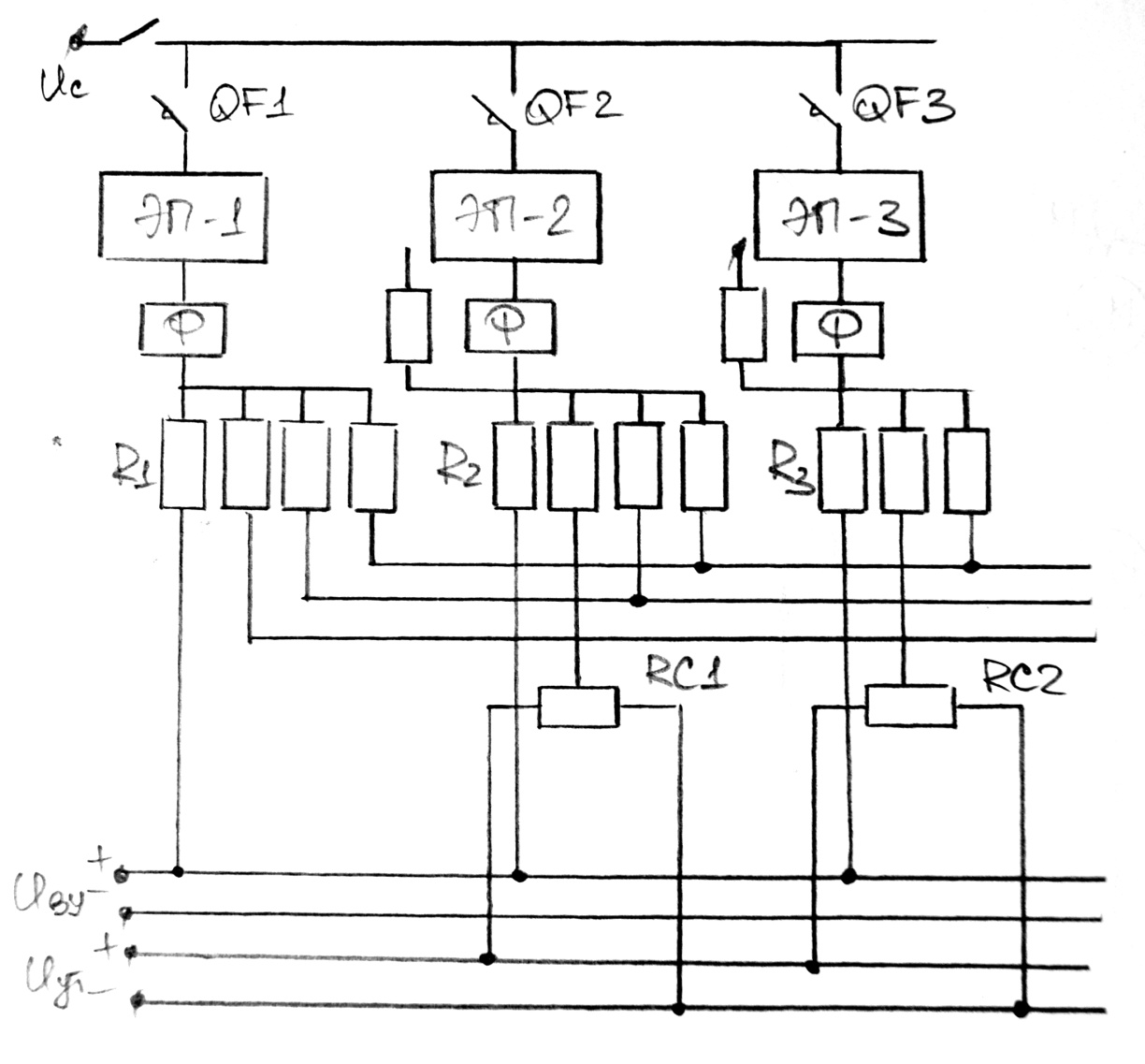
Рис.1. Функциональная схема ЭП с индивидуальным преобразователем
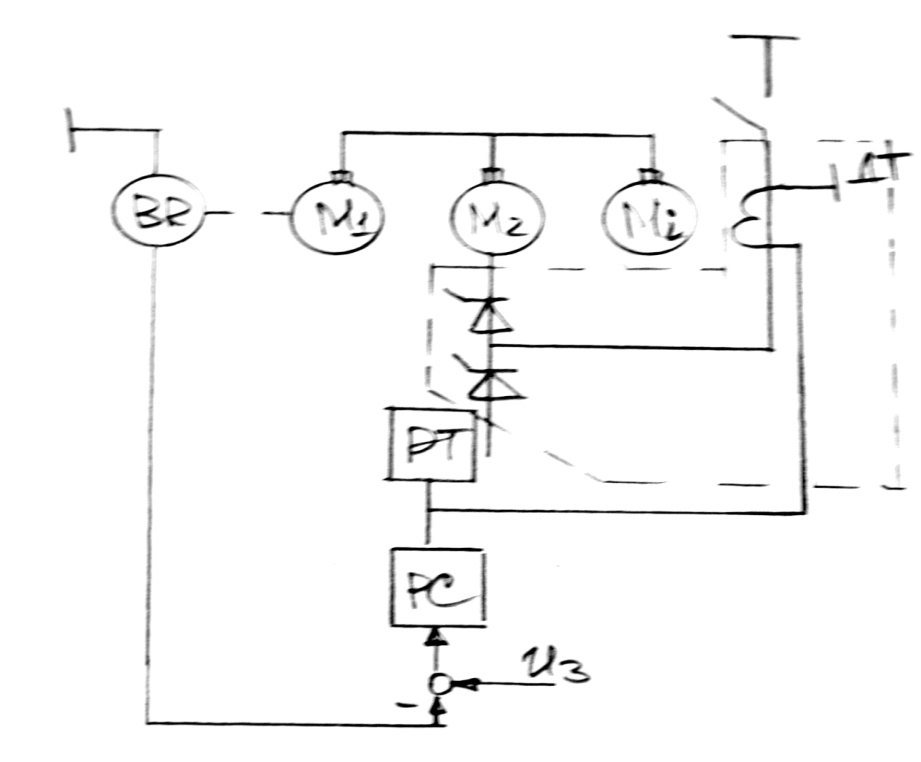
Рис.2.
Система строится на традиционных принципах подчиненного регулирования с ПИ-регулятором тока и ПИ-регулятором скорости. Общая базовая скорость приводов обеспечивается заданием ведущего напряжения Uвед. Для управления соотношением скоростей, или как называют управлением тягой, служат секционные потенциометры RС1 и RС2
Для изменения сил натяжения полотна между двумя секциями с помощью секционного потенциометра изменяется скорость приводов секций, находящихся слева от заданной
Дискретные цифровые системы автоматического регулирования фиксаторы соотношения скоростей
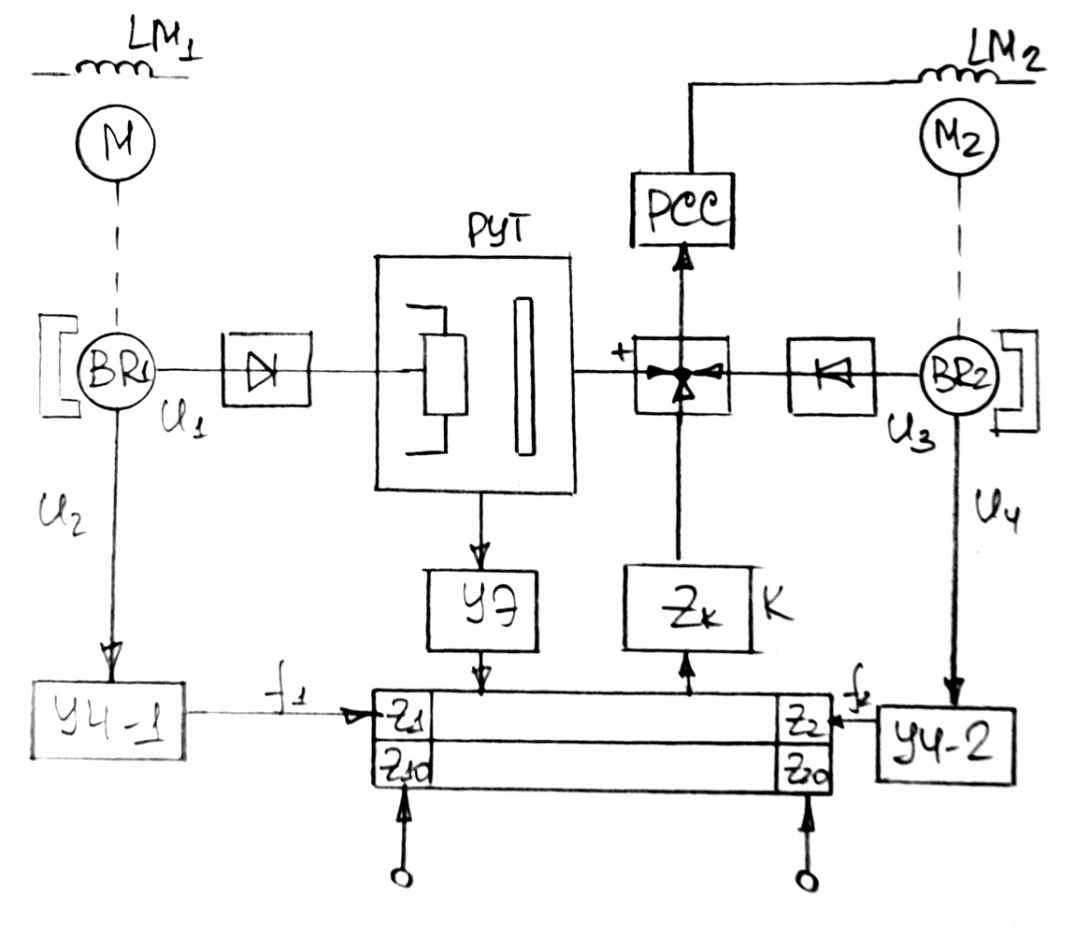
Рис.1. Цифроаналоговая схема соотношения скоростей
В схеме используется 2 тахогенератора BR1 и BR2 переменного тока с двумя выходными обмотками. Одна пара обмоток с напряжением U1 и U3 используется в аналоговой системе управления соотношения, управление ручное соотношением скоростей с помощью реле управления тягой РУТ. Цифровая часть питается от напряжения U2 и U4, которые с помощью умножителя частоты УЧ-1 и УЧ-2 преобразуются в импульсы f1 и f2 и в 2 числа z1 и z2. Ведущее число z10, если z10=z1, то счетчики останавливаются , если z2 достигло эталонного значения z20 это значит что установилось соотношение скорость v=z10/20. Если z2 не равно z20, то с помощью корректирующего устройства К, которое преобразует цифровой сигнал в аналоговый корректируется, через регулятор соотношения скоростей РСС, поток машины М2. В процессе задания соотношения с помощью РУТ цифровая часть отключается и счетчики обнуляются. Точность системы поддержания соотношением 0,03%
Стабилизация напряжения полотна
В бумагоделательной машине стабилизация натяжения полотна стабилизируется на сухой части машины, т.е. после сушилки. В качестве датчика натяжения используется прессдукторы или сельсин
Влияние упругости кинематических передач на динамические характеристики эп
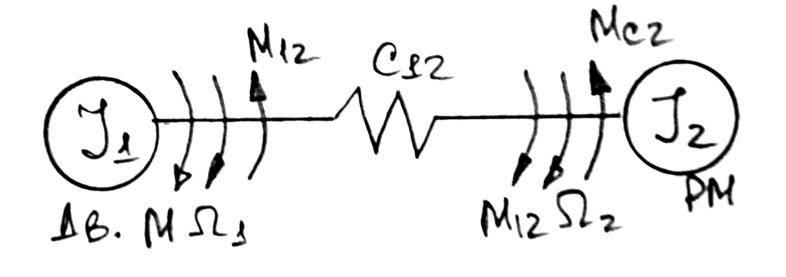
Рассмотрим процессы в простейшей двух массовой системе

В операторной форме

Механическая часть для данного воздействия представляет собой последовательность соединения интегрирующего и колебательного звеньев
Обозначим
 ,
,
 ,
,

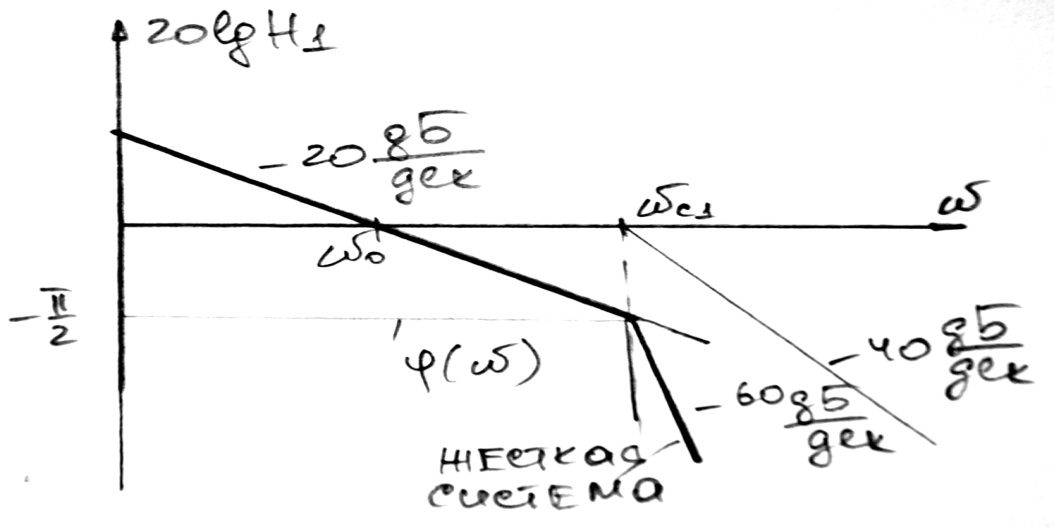
На частоте больше
 необходимо учитывать упругость, а до
частоты ЛАЧХ жёсткая и упругая системы
совпадают, т.е. на этих частотах можно
пренебрегать упругостью
необходимо учитывать упругость, а до
частоты ЛАЧХ жёсткая и упругая системы
совпадают, т.е. на этих частотах можно
пренебрегать упругостью

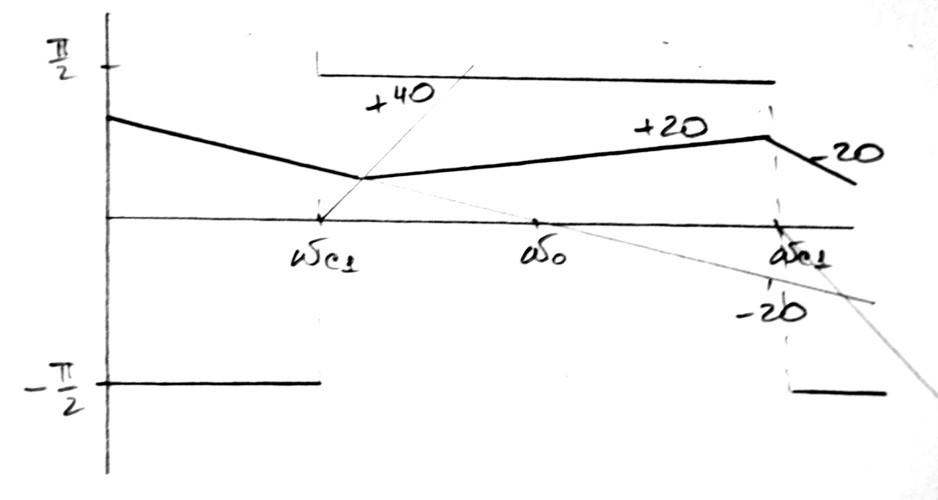
Имеем три последовательно соединённых интегрирующих звена с частотами


При
 меньше
меньше
 можно пренебрегать упругостью. Сравнивая
ЛАЧХ ПФ Н1 и Н2, можно заключить что при
прочих равных условиях при отборе ОС
по скорости с вала рабочей машины влияние
упругости будет проявляться раньше
можно пренебрегать упругостью. Сравнивая
ЛАЧХ ПФ Н1 и Н2, можно заключить что при
прочих равных условиях при отборе ОС
по скорости с вала рабочей машины влияние
упругости будет проявляться раньше
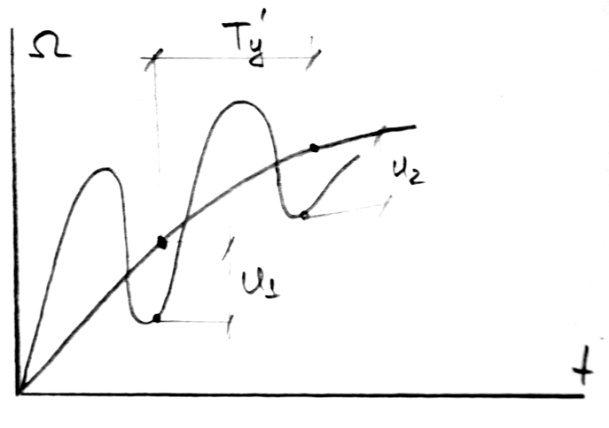
В реальных установках колебания демпфируются силами трения, т.е. имеет место вязкая упругость. В этом случае структурная схема



Для определения коэффициента вязкости пользуются экспериментом

 =1,2…25
– безред.
=100…150
– редукт.
=1,2…25
– безред.
=100…150
– редукт.
Тм=0,02…0,2с, Тя=0,02…0,15с
Колебания в механической части привода демпфируются приводом, при этом индуктивность в якорной цепи ослабляет демпфирующие способности двигателя тем больше, чем больше частота . Это указывает на то, что связь между электромагнитными и механическими процессами ослабляется, при этом динамические свойства всей системы зависят от места приложения механического возмущения (к валу двигателя или к валу рабочей машины), так с возрастанием J2 амплитуда упругого момента под действием момента нагрузки машины уменьшается, тогда как под действием Мс1 – увеличивается
Для оценки связи механических и электрических процессов, происходящих в ЭП, вводится понятие коэффициента электромеханической связи как отношение амплитуда момента двигателя и упругого момента при механическом воздействии на валу двигателя при частоте омега12
Весь диапазон
коэффициентов электромеханической
связи делят на 3 области – слабые, существенные
и жесткие связи. При слабой колебания
механической части не вызывают колебания
тока якоря двигателя
<0,2.
При существенной связи 0,2<
<5
двигатель максимально эффективно
демпфирует колебания механической
части, при
>5
демпфирующая способность двигателя
ослабляется из-за высокой жесткость
электромеханической характеристики
двигателя. Отвод энергии механических
колебаний в якорную цепь двигателя
отсутствует, также как и при слабой
связи.
зависит от гамма. При гамма меньше 2
(малое значение J2)
уменьшение гамма вызывает быстрое
уменьшение коэффициента связи, а при
гамма больше 5
практически не зависит от гамма. Уменьшают
возрастанием Тм и Ω0
делят на 3 области – слабые, существенные
и жесткие связи. При слабой колебания
механической части не вызывают колебания
тока якоря двигателя
<0,2.
При существенной связи 0,2<
<5
двигатель максимально эффективно
демпфирует колебания механической
части, при
>5
демпфирующая способность двигателя
ослабляется из-за высокой жесткость
электромеханической характеристики
двигателя. Отвод энергии механических
колебаний в якорную цепь двигателя
отсутствует, также как и при слабой
связи.
зависит от гамма. При гамма меньше 2
(малое значение J2)
уменьшение гамма вызывает быстрое
уменьшение коэффициента связи, а при
гамма больше 5
практически не зависит от гамма. Уменьшают
возрастанием Тм и Ω0
Обычно система ЭП
контролирует ток и скорость двигателя.
Учет упругой связи в этом случае
выполняется
 <
<

 ,
,
- частота среза контура тока
Не учитывают влияние упругости при оптимизированном контуре скорости, если:
При установке тахогенератора на валу электродвигателя
 ,
,

При установке тахогенератора на валу электромеханика