

Автоматизация типовых технологических процессов и промышленных установок (аттп и пу)
Глазунов Виктор Фёдорович
16 лекций
л/р + семинары
Литература
Белов М.В., Новиков В.А., Рассудов Л.Н. «Автоматизированный ЭП производственных механизмов и технологических комплексов» - М: Академия, 2004 год
Глазунов В.Ф., Прокушев С.В. «Автоматизация оборудования для непрерывной обработки текстильного производства». – ИГЭУ, 2002 год
Карытин А.М. и другие «АТТП и ПУ».-М: Энергоатомиздат, 1988 год
Морозовский В.Т. «Многосвязные системы автоматического регулирования».-М: Энергия, 1969 год
Глазунов, Летвинский, Куленко «Инженерные расчеты электроприводов текстильных машин». - ИГЭУ (МУ 1028)
МУ для л/р 542, 190, 193, 935, 938
Оптимизация режимов работы главного электропривода обжимного стана
Обжимные станы – слябинги (для изготовления листа) и блюминги
Блюм работает в очень напряженном режиме. Это реверсивный стан. 1200 пропусков/час, мощностью 10МВт
Необходимо построить
оптимальную диаграмму Ω(t)
 (t)
I(t),
соответствующую оптимальному режиму
работы, т.е. обеспечивающему заданное
перемещение заготовки
(t)
I(t),
соответствующую оптимальному режиму
работы, т.е. обеспечивающему заданное
перемещение заготовки
 за минимальное время tmin
при ограничении потерь qmin
≤ А
за минимальное время tmin
при ограничении потерь qmin
≤ А
Задача решается методом вариационного исчисления. Запишем уравнение движения привода для простоты на холостом ходу, т.е. примем Mc=0 при постоянном потоке двигателя Ф=сonst
Нагрев двигателя за время работы t определятся потерями энергии в якоре
Требуется отработать заданное перемешенное за минимальное время t при ограничении потерь в двигатели qпер < А. Математически задача сводится к нахождению экстремали функционала
 (1)
(1)
 (2)
(2)
 (3)
(3)
Объединим (1) (2) (3) в один функционал
 (4)
(4)
λ – некоторые коэффициенты, которые находятся в процессе решения задачи

После преобразования
 (5)
(5)

 (6)
(6)

Уравнение Эйлера для функционала Q


 (8)
(8)


Оптимальное, в смысле быстродействия, управление двигателем при выполнение функционалов (1) (2) (3), должно выполняться при линейном изменении тока. Скорость изменяется в соответствии с (10) по параболическому закону
Найдем постоянную интегрирования с1 и с2 и множитель λ0. Они определяются граничными условиями Ω(0)=Ω(Т)=0, I(0)=I(T)=-I0, которые соответствуют началу разгона и торможения двигателя



Подставляя (12) в (11), получим

Определим I0 и t через параметры двигателя

Подставим с1, с2 и λ0 в уравнение для скорости

Приравняем (15) и (16) и получим
Управление двигателем производится изменением напряжения на якоре
Uя=R*I+….

Получаем зависимость тока от скорости I=f(Ω)
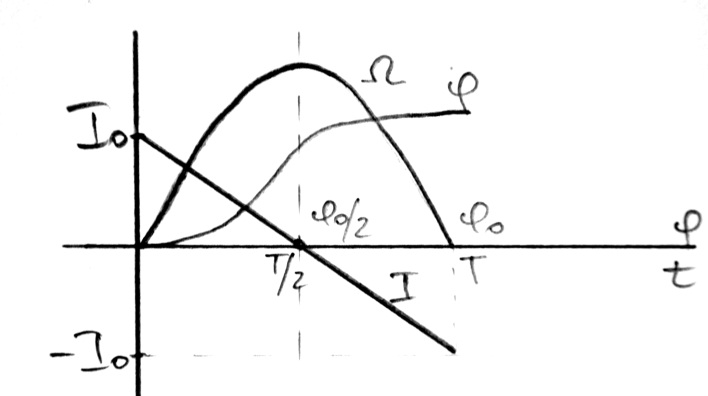
Рис.1. Диаграмма зависимости от времени
Выбор ведущего электродвигателя в системе взаимосвязанного электропривода поточного объекта
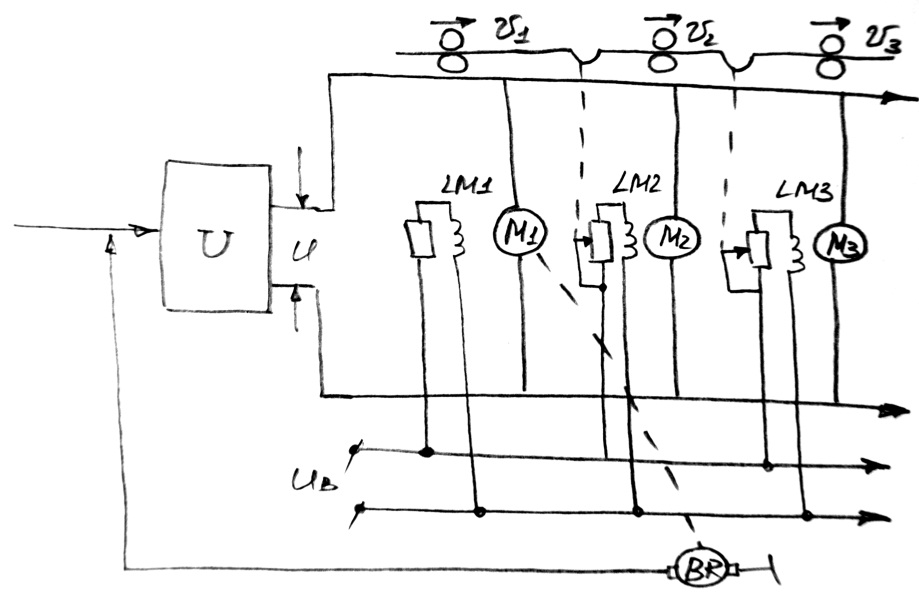
Рис.1. Схема ЭП с централизованным преобразователем
Для улучшения согласованной работы двигателей в системе взаимосвязанного электропривода (ВСЭ) с централизованным преобразователем (ЦП) необходимо иметь в качестве ведущего двигателя двигатель с максимально жесткой естественной характеристикой, т.к. он имеет минимальные отклонения скорости при изменении своей нагрузки, что требует меньшего запаса по потоку при регулировании скоростей ведомых двигателем. Поэтому в качестве ведущего двигателя по условиям статической устойчивости выбирается двигатель с максимальной мощностью
По условиям динамической устойчивости в качестве ведущего необходимо выбирать двигатель, находящийся в начале технологического потока. Это объясняется действием перекрестной связи по натяжению между смежными машинами и ее разным действием перед перекрестном связей в том случае, когда двигатель находится в начале потока или в другом месте
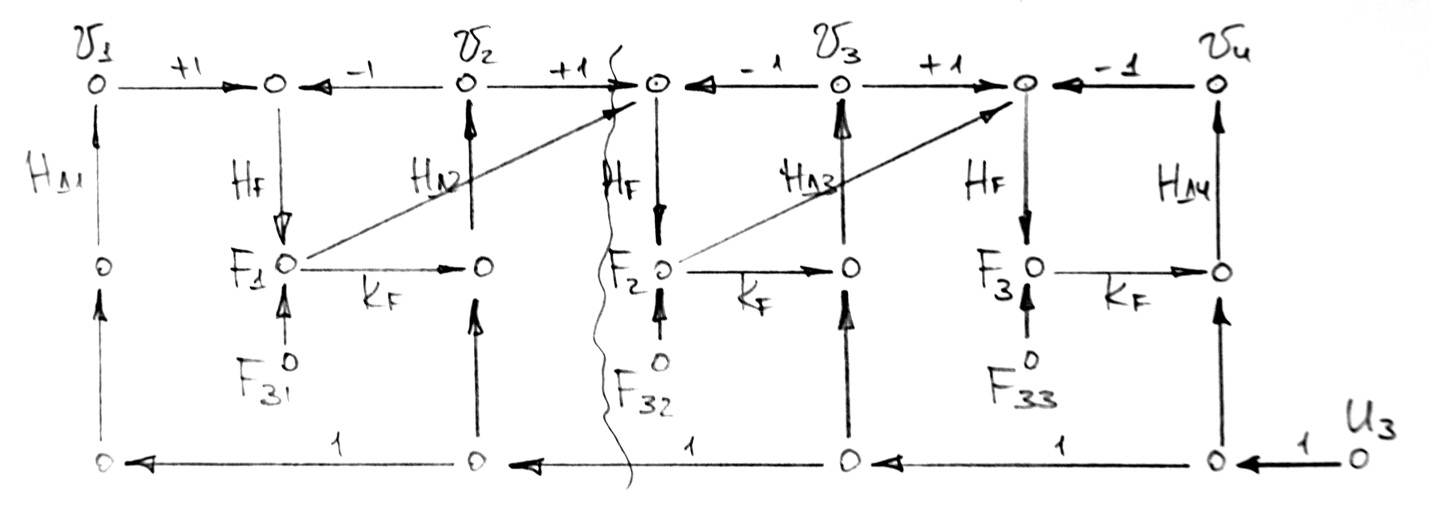
Рис.2. Ведущий ЭД в начале потока
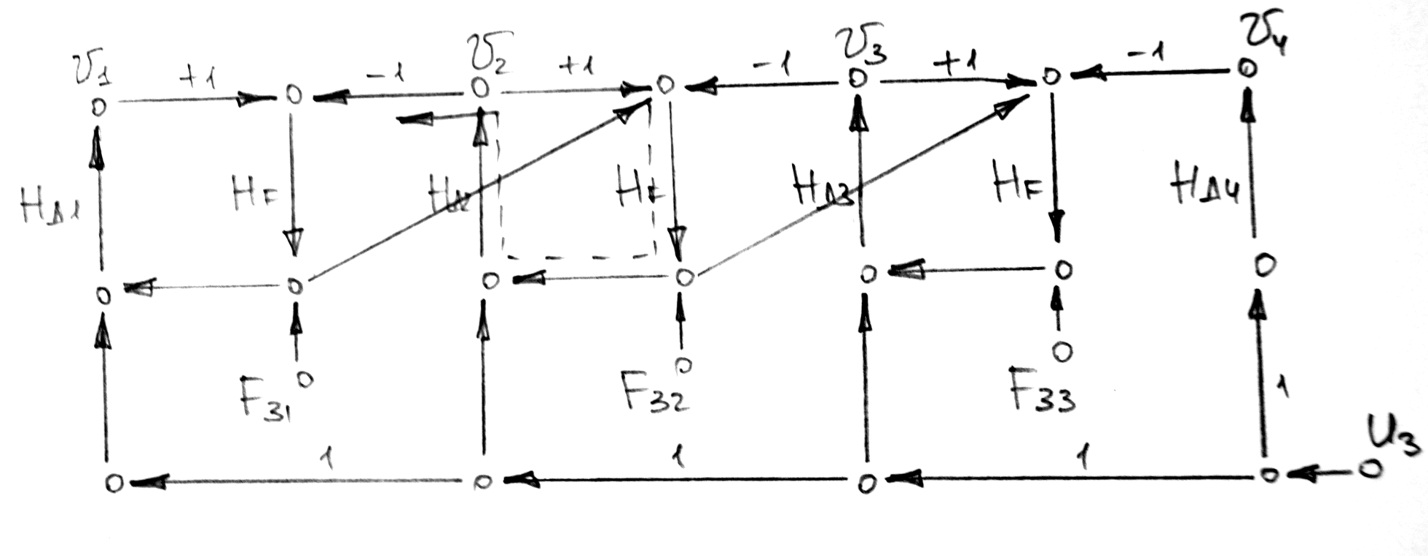
Рис.3. Ведущий ЭД в конце потока
НД1 – передаточная функция (ПФ) двигателя при управлении от стороны якоря
HF – ПФ волокна по натяжению
KF – коэффициент обратной связи по натяжению
При расположении ведущего двигателя в начале потока действующая между локальными подсистемами перекрестная связь по натяжению воспринимается каждой последующей по направлению движения полотна как возмущение, не влияющее на их устойчивость и устойчивость всей системы в целом. Матрица обратных связей в этом случае является треугольной. При этом возмущение распространяется в такой системе любое только в направлении движения полотна.
При расположении ведущего двигателя в конце потока действие перекрёстной связи по натяжению между локальными подсистемами распространяется в обе стороны от подсистемы, в которой возникло возмущение. При этом устойчивость всей системы ЭП определяется параметрами всех локальных подсистем. Тогда как в первом случае эта устойчивость определяется устойчивостью каждой локальной подсистемы
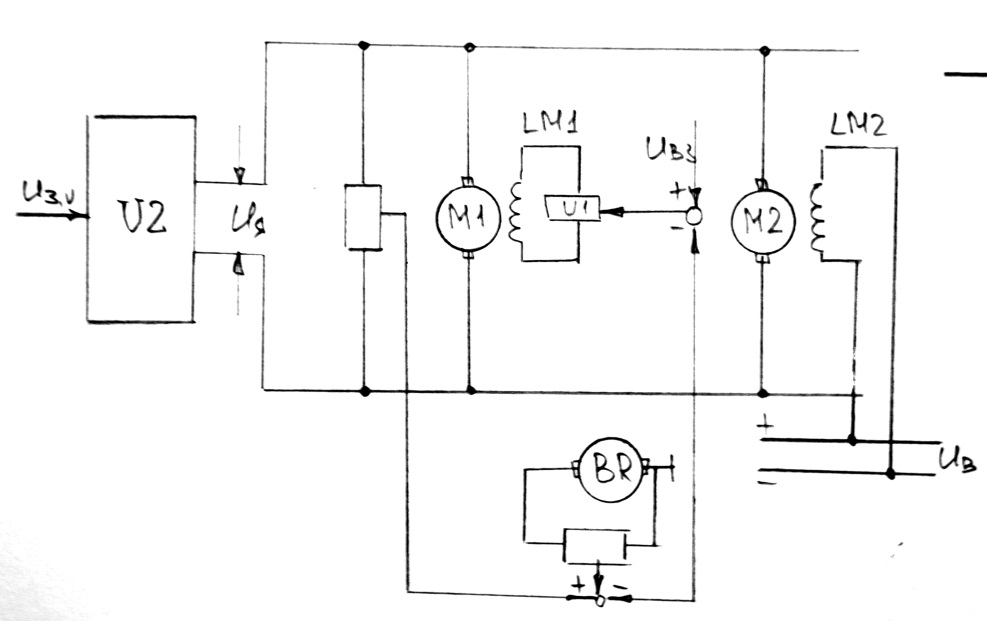
Рис.4.
Такая система стабилизация скорости чувствительна к ускорению при пуске. При быстром разгоне напряжение якоря быстро нарастает, скорость двигателя не успевает за ростом напряжения на якоре, что приводит к запаздыванию нарастания потока двигателя и возможному его опрокидыванию