

Применение теории стационарных процессов
К ЗАДАЧАМ, СВЯЗАННЫМ С АНАЛИЗОМ И СИНТЕЗОМ
ДИНАМИЧЕСКИХ СИСТЕМ
Оптимизация линейной системы при заданной её структуре
ТИПОВАЯ ЗАДАЧА С РЕШЕНИЕМ
 Найти
значение постоянной времени линейной
системы, отвечающее минимуму дисперсии
ошибки на выходе этой системы, являющейся
фильтром.
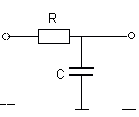
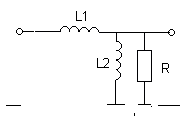
Рассмотрим в качестве линейной системы
простейшее интегрирующее звено (рис.
3.1).
Найти
значение постоянной времени линейной
системы, отвечающее минимуму дисперсии
ошибки на выходе этой системы, являющейся
фильтром.
Рассмотрим в качестве линейной системы
простейшее интегрирующее звено (рис.
3.1).
Рис. 3.1
Решение
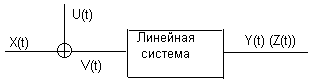 Ошибка
на выходе системы обусловлена тем, что
на вход системы поступает не только
полезный случайный процесс X(t),
но и помеха, также представляющая собой
случайный процесс U(t)
(рис.3.2).
Ошибка
на выходе системы обусловлена тем, что
на вход системы поступает не только
полезный случайный процесс X(t),
но и помеха, также представляющая собой
случайный процесс U(t)
(рис.3.2).
Рис. 3.2
Таким образом, на вход системы поступает суммарный сигнал
V(t) = X(t) + U(t). (3.1)
На выходе системы вместо желаемого сигнала Z(t) возникает сигнал Y(t). Таким образом, ошибка на выходе системы определяется как
E(t) = Z(t) – Y(t). (3.2)
Операторное изображение желаемого сигнала на выходе системы связано с операторным изображением полезного сигнала на её входе с помощью выражения
Z(p) = X(p)G(p) , (3.3)
где G(p) – передаточная функция системы при условии отсутствии помехи.
Операторное изображение истинного сигнала на выходе системы связано с операторным изображением суммарного сигнала на её входе с помощью передаточной функции H(p):
Y(p) = V(p)H(p). (3.4)
Операторное изображение ошибки с учетом приведенных выше выражений определится как
E(p) = X(p)[G(p)-H(p)] – U(p)H(p). (3.5)
При решении задачи фильтрации помехи Z(t)=X(t) и G(t)=1. Как правило, систематическая ошибка на выходе системы отсутствует (такая система называется астатической). Поэтому критерием оптимальности системы может, в частности, служить минимум дисперсии ошибки на её выходе. Для определения дисперсии ошибки предварительно целесообразно определить корреляционную функцию cтационарного процесса на выходе (KYY(0)=DY). При заданных корреляционных функциях полезного случайного процесса и помехи на входе и заданной структуре передаточной функции линейной системы DY будет зависеть лишь от параметров этой системы, которые и надлежит определять, исходя из требования минимизации ошибки на выходе системы.
При решении этой задачи целесообразно воспользоваться понятием спектральной плотности случайного процесса, которая в рассматриваемом случае фильтрации помехи определится как
SEE(p)=SXX(p)(1-H(p))(1-H(-p)) + SUU(p)H(p)H(-p). (3.6)
Затем с помощью обратного двустороннего преобразования Лапласа [выражения (2.3) и (2.4)] определяется KEE() и, наконец, DE.
В
рассматриваемом примере примем, что на
вход системы рис. 3.1 поступает полезный
стационарный случайный процесс,
характеризующийся корреляционной
функцией KXX()=DXeи
помеха, представляющая собой белый шум
– KUU()=![]() ,где
1()
– импульсная функция первого рода
(функция Дирака). Спектральные плотности
этих процессов запишутся в виде:
,где
1()
– импульсная функция первого рода
(функция Дирака). Спектральные плотности
этих процессов запишутся в виде:
SXX(p)=![]() SUU(p)=c2.
(3.7)
SUU(p)=c2.
(3.7)
Передаточная функция интегрирующей линейной системы (рис.3.1) будет
H(p)=/(p+), где =1/RC. (3.8)
Спектральная плотность ошибки в соответствии с выражением (3.6) определится как
SEE(p)=-
![]() (3.9)
(3.9)
Переходя в (3.9) к оригиналу при [выражение (2.3)],получим
KEE()=![]() (3.10)
(3.10)
Полагая в (3.10) =0, получим
DE=![]() (3.11)
(3.11)
При заданных параметрах корреляционных функций KXX() и KUU() величина дисперсии DE зависит лишь от параметра линейной системы =1/Т ( Т=RC – постоянная времени схемы рис. 3.1). Зависимость DE=f() при DX=2, =1 1/с, с=0.5 в рассматриваемом случае приведена на рис.3.3. Из рисунка следует, что при некотором значении наблюдается минимальная дисперсия ошибки, т.е. при заданных характеристиках полезного сигнала и помехи на входе системы последняя при этом значении T=1/ является оптимальной.

 Рис.3.3
Рис.3.3
Значение , отвечающее DEmin, можно получить и аналитически, взяв производную по от выражения (3.11) и приравняв её нулю. Выражение для опт при этом имеет вид
опт![]() (3.12)
(3.12)
В рассматриваемом примере опт=3 1/с и соответственно Топт=1/3 с.
ЗАДАЧИ ДЛЯ САМОСТОЯТЕЛЬНОГО РЕШЕНИЯ ПО ПРОДРАЗДЕЛУ 3.1
Задание 3
Во
всех вариантах задания найти значение
постоянной времени линейной динамической
системы, отвечающее минимуму дисперсии
ошибки на выходе системы. Корреляционная
функция полезного сигнала на входе
системы описывается выражением
KXX()=DXe
(DX=1,
величина
определена в вариантах задания).В
вариантах заданияприняты два вида
корреляционной функции помехи: функция
того же вида,что и функция полезного
сигнала: KUU()=DUe
(DU=2,
2
1/c; в
вариантах задания обозначена как функция
№ 1),
и корреляционная функция случайного
процесса вида "белый шум" KUU()=![]() (с=0.5;
в вариантах задания обозначена как
функция № 2).
(с=0.5;
в вариантах задания обозначена как
функция № 2).
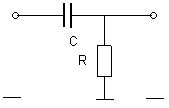
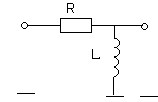
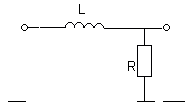
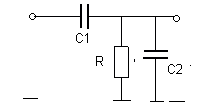
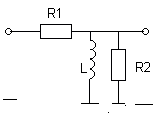
В заданиях рассматривается 8 пассивных линейных динамических систем, процессы в которых описываются линейными дифференциальными уравнениями первого порядка.
Варианты линейных систем
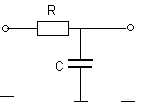
 №1.
№ 2.
№1.
№ 2.
 № 3
№ 4
№ 3
№ 4

 № 5
№ 6
№ 5
№ 6
 № 7
№ 8
№ 7
№ 8
Номер варианта |
, 1/с |
Номер KUU() |
Номер схемы |
1 |
0.25 |
1 |
1 |
2 |
0.25 |
2 |
2 |
3 |
0.50 |
2 |
3 |
4 |
0.50 |
1 |
4 |
Номер варианта |
, 1/с |
Номер KUU() |
Номер схемы |
5 |
0.50 |
2 |
4 |
6 |
1.00 |
1 |
5 |
7 |
1.00 |
2 |
5 |
8 |
1.00 |
2 |
6 |
9 |
0.75 |
2 |
7 |
10 |
0.75 |
1 |
8 |
11 |
0.75 |
2 |
8 |
12 |
0.25 |
1 |
5 |
13 |
0.25 |
2 |
5 |
14 |
1.00 |
2 |
6 |
15 |
0.75 |
2 |
7 |
16 |
0.75 |
1 |
8 |
17 |
0.75 |
2 |
8 |
18 |
1.50 |
1 |
4 |