

Реле змінного струму
Реле змінного струму спрацьовують при подачі на їхні обмотки змінного струму визначеної частоти. Ці реле частіше усього застосовуються в тих випадках, коли основним джерелом енергії є мережа змінного стуму.
Будова реле змінного струму нагадує будову реле постійного струму, тільки осердя і якір реле змінного струму виготовляються з листової електротехнічної сталі, щоб зменшити втрати на гістерезис і вихрьові струми.
Слід зазначити, що реле змінного струму застосовуються в техніці рідше, ніж реле постійного струму, тому що мають менше електромеханічне зусилля і менше чутливі в порівнянні з останніми. Вони складніші і дорожчі, тому що осердя і якір їх набираються з окремих листів; крім того, необхідно застосовувати спеціальні міри для усунення вібрацій якоря, що викликані тим, що електромеханічне зусилля проходить через нуль двічі за період живлячої напруги. Вібрація якоря - небажане явище, тому що може привести до обгорання контактів і розриву керованого кола. Для зменшення вібрацій якоря в техніці застосовуються спеціальні конструктивні заходи, наприклад застосування утяжеленого якоря двухфазного реле і коротко–замкненого витка .
На рис. 7.4, а показана конструкція реле змінного струму з короткозамкненим витком або реле з “роздвоєним” полюсом, що частіше усього застосовується у пристроях автоматики. Один кінець сердечника реле 1 расщеплен на дві частини, причому на одну частина надітий короткозамкнений виток 4 (один або декілька витків мідного дроту), що виконує роль екрана. При подачі змінної живлячої напруги на обмотку реле 2 по осердю проходить змінний магнітний потік Ф, що у кінця осердя розгалужується. Частина магнітного потоку Ф1 проходит через неекрановану половину кінця осердя , а інша частина магнітного потоку Ф2 проходить через екрановану половину кінця осердя . Магнітний потік Ф2 наводить у короткозамкненому витку ЕРС,
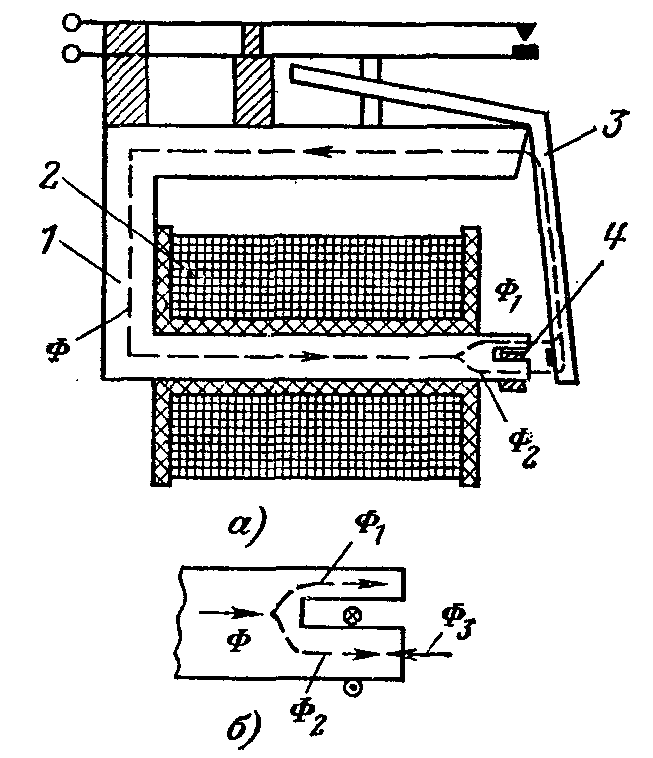
Рис. 7.4. Реле змінного струму з короткозамкненим витком.
а—конструкція; б—напрямок магнітних потоків у розчепленій частині осердя
що створює струм, що у свою чергу викликає магнітний потік Ф3, спрямований назустріч потокові Ф2 (рис. 7.4,б). У результаті потоку Ф3 потік Ф2 відстає по фазі що до потоку Ф1 на кут 60 – 80 . Тому сумарне електромеханічне зусилля Рем при подачі на обмотку живлячої напруги ніколи не дорівнює нулю, тому що обидва потоки (Ф1 і Ф2) проходять через нуль у різні моменти часу, тобто коли один із потоків, наприклад Ф1 проходить через нуль, іншій Ф2 має визначене значення й утримує якір 3 у притягнутому положенні,
В даний час промисловість країни випускає багато типів реле змінного струму.
Розподільники
У автоматиці, телемеханіці, обчислювальній техніці і зв'язку часто необхідно послідовно підключати керовані (виконавчі) кола. Для виконання зазначеної задачі застосовуються електромеханічні, релейні й електронні розподільники.
Електромеханічні розподільники можуть приводитися в рух електромагні-тами постійного струму або електродвигунами. У техніці найбільше поширення отримали розподільники, що приводяться в рух електромагнітами постійного струму. Такі розподільники в літературі частіше усього називаються кроковими шукачами з електромагнітним приводом. Кроковий шукач так само, як і реле, є пристроєм дискретної дії. Він містить щітки (рухливі контакти), що під дією керуючого сигналу, подаваного на обмотку електромагніта, здійснюють послідовне переключення керованих кіл. У кожного крокового шукача є також і нерухомі контакти, що розташовуються по дузі окружності в декілька контактних рядів, створюючи при цьому контактні поля, причому кожний контактний ряд має свою щітку. Контактні поля виконуються не на повну окружність, а на половину (180) або третина (120) окружності. Число контактів на однім полі буває від 11 до 50, а число контактних рядів від 2 до 8. Швидкість переключення щіток складає від 1 до декількох десятків кроків у секунду. Вона обмежена інерційністью електромагніта. Рекомендуєма швидкість руху щіток – 10-11 кроків у секунду. Потужність, споживана електромагнітом, дорівнює 50-70 Вт.
За принципом дії крокові шукачі діляться на два види: прямої дії і зворотної. Як приклад на рис. 4-9 показана спрощена конструкція крокового шукача зворотної дії, принцип роботи якого полягає в наступному. Переміщення щітки 4 по нерухомих контактах 3 здійснюється за рахунок поворотної пружини 9, що має достатню пружність для створення зусилля, яке необхідно для пересування щітки. При надходженні керуючого сигналу на обмотку електромагніта 2 якір 1, долаючи дію поворотної пружини 9, притягуються і
Рис 7.5
Кроковий шукач зворотної дії
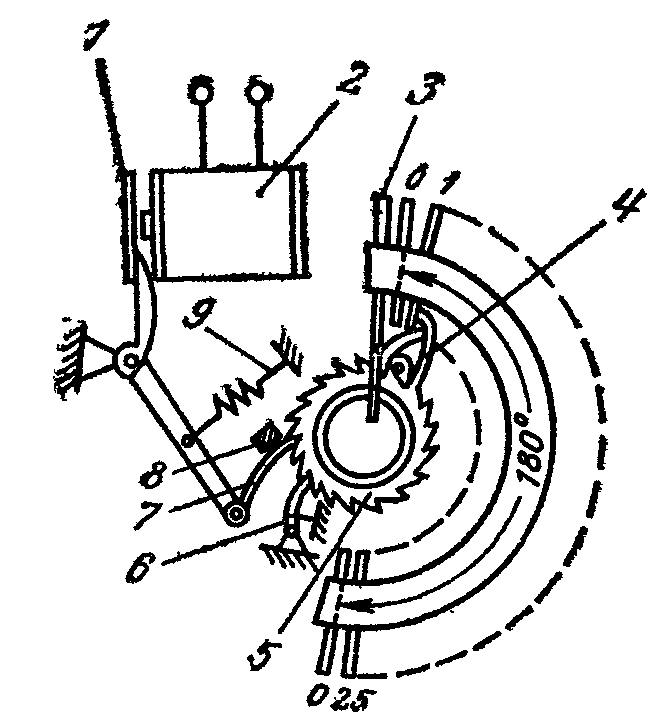
Якщо в кроковому шукачі зворотної дії переключення керованого кола відбувається на початку паузи (після зняття керуючого сигналу), то в кроковому шукачі прямої дії переключення керованого колоа здійснюється на початку подачі керуючого сигналу, тобто щітка 4 пересувається в той момент, коли якір 1 притягається до сердечника електромагніту.
В даний час найбільше поширення одержали мікроконтролери.
Лекція 8
Виконавчі пристрої. Електричні виконавчі пристрої.
Виконавчі пристрої і елементи застосовуються для безпосереднього впливу на об’єкт управління.. Вони діляться на: електричні, гідравлічні, пневматичні , механічні і комбіновані.
Виконавчі пристрої повинні задовольняти наступним вимогам
1.Їх потужність повинна задовольняти вимоги для приведення до руху об’єкту регулювання.
2. Їх статичні характеристики повинні бути лінійними.
3.Зона нечутливості повинна бути мінімальна.
4. Повинна бути достатня швидкодія.
5. Регулювання вихідної величини повинно бути простим і економічним.
Гідравлічні виконавчі пристрої
Гідравлічні виконавчі пристрої (гідравлічні двигуни) перетворюють енергію тиску рідини в механічну енергію переміщення або обертання,
Залежно від виду управляючого елементу розрізняють гідравлічні виконавчі пристрої з дросельним і об'ємним регулюванням.
Гідравлічні виконавчі пристрої з дросельним регулюванням працюють при постійному тиску робочої рідини і управляються від спеціального пристрою — змінного дроселя. У якості дроселя звичайно використовуються золотники, підсилювачі типу сопло—заслінка і струменеві трубки.
Гідравлічні виконавчі пристрої з об'ємним регулюванням керуються за рахунок зміни продуктивності насосу який подає робочу рідину у гідравлічний двигун з обертальним рухом. У якості робочої рідини застосовують нафтові масла , синтетичні рідини
та інші .
Основними перевагами гідравлічних двигунів є те, що вони допускають значні короткочасні перевантаження (до 5—7-кратних), характеризуються великими вихідними моментами або зусиллями при малих габаритах і можуть забезпечити кутові прискорення понад 20 000 рад/с2.
До істотних недоліків можна віднести велику масу, значну потужність керування, а також труднощі ліквідації пошкоджень. Тому гідравлічні виконавчі пристрої найчастіше застосовуються в системах, де необхідно короткочасно розвивати значні зусилля і моменти.
Пневматичні виконавчі пристрої
Вказані виконавчі пристрої будуються за такою ж схемою, що і гідравлічні. Відмінності пневматичних пристроїв від гідравлічних обумовлені відмінностями у властивостях газу і робочої рідини. Стисливість газу значно впливає на швидкодію системи, особливо при значному навантаженні або при значних прискореннях.
Пневматичні виконавчі пристрої працюють на стислому повітрі, газі низького тиску 1 — 1,5 МПа, а також на гарячому газі високого тиску 15—20 МПа. У якості останнього можуть бути використані відпрацьовані гази реактивного двигуна або спеціального газогенератора .
Пневматичні виконавчі пристрої за будовою діляться на поршневі і мембранні
Поршневі пневматичні виконавчі пристрої , як і гідравлічні, мають силовий циліндр з поршнем і дросельний пристрій. За будовою і принципом дії вони аналогічні поршневим пневматичним підсилювачам.
Мембранні пневматичні виконавчі пристрої можуть бути односторонньої і подвійної дії. У пристроях односторонньої дії рух мембрани в одному напрямі виробляється зусиллям зростаючого тиску газу, а в протилежному —зусиллям пружини. У пристроях подвійної дії рух мембрани в обидві сторони здійснюється зусиллям зростаючого тиску газу.
Основним недоліком мембранних пневматичних виконавчих пристроїв є мале переміщення тяги, обмежуване прогинанням мембрани. Максимальне переміщення мембрани може досягати 40 мм.
Пневматичні виконавчі пристрої розрізняються простотою і міцністю конструкції і при масовому виготовленні дешевше електричних.
Електричні виконавчі пристрої.
Виконавчий пристрій , який перетворює енергію електричного струму в механічну енергію з метою впливу на об’єкт управління, називається електричним виконавчим пристроєм .Електричні виконавчі пристрої підрозділяються на електромагнітні пристрої і електродвигунні пристрої.
До електромагнітних пристроїв відносяться: реле, контактори, електромагнітні муфти.
До електродвигунних – двигуни змінного і постійного струму.
В деяких автоматичних системах управління у якості виконавчих пристроїв застосовуються електромагнітні муфти. Електромагнітні муфти будучи проміжними елементами між привідним двигуном і відомим валом, маючі змінне ковзання дозволяють регулювати частоту оберту вихідного валу системи.
Частоту
оберту вихідного вала системи в залежності
від засобу зміни способу утворення
змінного ковзання електромагнітної
муфти можна розподілити на два тип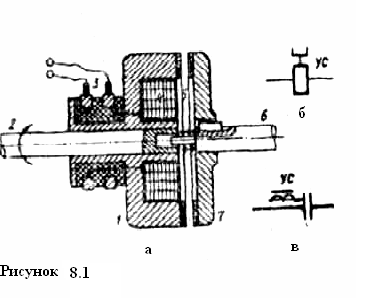 и:
муфти тертя, муфти ковзання.
и:
муфти тертя, муфти ковзання.
У муфт першого типу обертовий момент на вихід валу складається шляхом тертя у муфт другого типу момент утворюються в результаті взаємодій струмів виникаючих у якорі, з обертаючимся магнітним потоком індуктора
У свою чергу муфти тертя бувають двох видів : муфти сухого тертя і муфти в’язкого тертя.
Електромагнітна фрикційна муфта релейної дії (сухого тертя) зображена на рис. 8. (1 — осердя, розташоване на ведучому валу 2; 4 — котушка; 7—якір на веденому валу 6). При пропусканні струму по котушці якір, переміщуючись по шпонці, притискується до осердя, причому дотикання здійснюється по кільцевій поверхні, де і на осерді, і на якорі нанесено покриття 5, з високим коефіцієнтом тертя; тому якір починає обертатися разом з осердям. Після припинення подачі струму в котушку пружина відштовхує якір від осердя, й муфта розчіплюється. Для підведення струму до котушки використовуються контактні кільця та мідно-графітові щітки 3. Умовні графічні позначення для електричних схем — рис. 8.1 б, для кінематичних — 8.1в.
Електромагнітні муфти ковзання
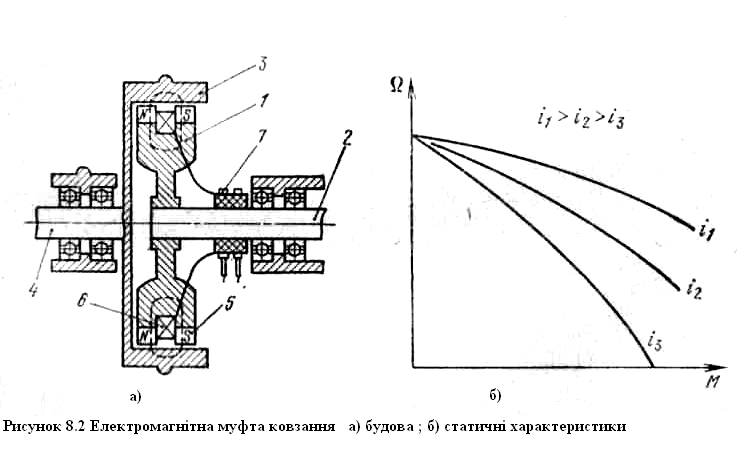
Електричні муфти ковзання (рис. 8.2 а ), виконані за принципом асинхронного двигуна. Муфта складається з індуктора (1), сполученого з провідним валом (2) і якоря (3), що жорстко скріпляється з відомим валом (4). Індуктор є електромагнітом постійного струму з явно вираженими полюсами (5), магнітний потік якого замикається через якір. При обертанні індуктора його магнітне поле обертатиметься щодо якоря, виконаного у вигляді короткозамкненої обмотки «біляче колесо» або порожнистого ротора—стакана. У якорі при обертанні індуктора наводяться струми, які, взаємодіючи з полем індуктора, створюють обертаючий момент, що захоплює якір. Постійний струм до котушки збудження (6) індуктора подається через контактні кільця (7).
На мал. 8.2 б показані типові статичні характеристики муфти ковзання: залежність кутової швидкості Q відомого валу від моменту М на ньому при різних значеннях струму в обмотці індуктора. Ці муфти виконуються на потужність від десятків ватів до тисяч кіловат.
Лекція 9
Автоматичні системи контролю