

Лекція 1
Вступ
Сучасний розвиток народного господарства характеризується широким впровадженням автоматизації у виробничі процеси. Автоматизація — це етап розвитку машинного виробництва. Вона покликана не тільки звільнити людину від виконання важкої фізичної праці, але і допомогти їй в керуванні виробництвом.
Не варто змішувати поняття автоматизації і механізації. Механізація являє собою заміну ручної праці енергією машин, причому функції керування машинами залишаються за людиною. Автоматизація — це більш висока стадія механізації, при котрій функції керування виконуються автоматичними пристроями. Отже, автоматизація механізує не тільки працю, але і керування . При автоматизації різко зростають швидкість і точність виконання операцій, що приводить до підвищення продуктивності праці. Автоматизація дозволяє також управляти процесами, якими людина безпосередньо управляти не може через їхню шкідливість або віддаленість, наприклад керування хімічними і ядерними процесами або безпілотними літальними апаратами.
В умовах сучасної економіки автоматизація виробничих процесів є одним із головних напрямків технічного прогресу. Автоматизація безпосередньо і нерозривно зв'язана з такою формою організації виробництва, при якій стираються грані між розумовою і фізичною працею.
Сучасні досягнення науки і техніки в області автоматизації спрямовані на створення автоматичних пристроїв, необхідних для різних галузей промисловості і сільського господарства. Автоматичним пристроєм називається пристрій, що здійснює контроль і (або) керування різними процесами і забезпечує часткове або повне звільнення людини від виконання даних функцій. До перших автоматичних пристроїв можна віднести автоматичний регулятор, винайдений у 1765 р. російським механіком І.І. Ползуновим. Автоматичний регулятор був встановлений на Барнаульскому заводі і здійснював підтримку заданого рівня води в паровому казані. У 1784 р. англійський механік Дж. Уатт використовував такий же принцип роботи регулятора на паровій машині, у якій підтримувалася частота обертання кривошипа у визначеному діапазоні чисел оборотів. В основу перших автоматичних регуляторів був покладений принцип регулювання по відхиленню регульованого розміру або принцип Ползунова — Уатта.
Велику роль у розробці теорії автоматичних регуляторів зіграла робота “О регуляторах прямої дії” (опублікована в 1877 р.) основоположника класичної теорії автоматичного регулювання, професора Петербургського технологічного інституту І А. Вишнеградського (1831-1895 р.). У своїх наступних роботах І. А. Вишнеградський розкрив динаміку роботи машини, яка має регулятор Уатта, і показав, що машина і регулятор під час роботи утворять єдину систему.
Роботи І. А. Вишнеградського були продовжені словацьким вченим А. Стодола, що вивів умови сталості для лінійних систем вище третього порядку. На прохання А. Стодола швейцарський математик А. Гурвиць вивів умови сталості для лінійних систем будь-якого порядку.
Наприкінці XIX в. російський математик А. М. Ляпунов дав загальне формулювання поняття сталості руху й описав основні методи для дослідження сталості систем.
Перший теоретичний курс по автоматичному регулюванню був прочитаний у МВТУ Н. Е. Жуковським. У 1909 р. лекції Н. Е. Жуковського були видані окремою книгою й одержали широку відомість у Росії. У цій книзі Н. Е. Жуковський виклав також результати своїх досліджень в області нелінійної теорії регулювання.
Після Великої Жовтневої соціалістичної революції великий внесок у розвиток теорії автоматичного регулювання внесли такі вчені, як М.А. Айзерман, Н. Н. Богомолов, И.Н. Вознесенський, В.С. Кулебакин, В. А. Трапезников, Б. Н. Петров, Б. С. Сотсков, В. В. Солодовников, Я.3. Ципкин, А.М. Летов і ін. Велике значення для вивчення теорії автоматичного регулювання мала опублікована в 1938 р. робота А. М. Михайлова “Гармонійний метод у теорії регулювання”, В цій роботі був запропонований новий критерій сталості автоматичних систем регулювання. Роботи з теорії автоматичного регулювання висунули радянську науку на одне з перших місць у світі. Тому перший міжнародний конгрес із питань автоматичного керування проходив у Москві в 1960 р.
Новий якісний розвиток автоматика одержала після створення електронних цифрових обчислювальних машин (цифрових ЕОМ), що дозволяють швидко переробляти одержувану інформацію про процеси, що відбуваються у системі у системі. Перші цифрові ЕОМ були створені в 1945 р. В сучасних складних системах автоматики цифрова ЕОМ включається безпосередньо в ланцюг автоматичного керування. Такими системами автоматики можуть бути, наприклад, системи автоматичного керування з автоматичним пошуком оптимального режиму роботи керованого об’єкта, що у найпростішому виді являють собою системи ,які самопристосовуються .Найбільш удосконаленою системою , що самопристосовується , є живий організм. Тому в даний час учені, що працюють в області кібернетики, велика увагу приділяють вивченню процесів керування в живих організмах. Це необхідно для того, щоб усе краще, що створила жива природа, можна було б використовувати при створенні нових сучасних самонастроювальних і систем , і систем що самопристосовуються.
Лекція 2
Загальні відомості про системи автоматики.
Системи автоматики і телемеханіки широко застосовуються в народному господарстві. Вони дозволяють механізувати трудомісткі і важкі роботи, допомагають людині в керуванні виробництвом, дають можливість знизити собівартість продукції і збільшити продуктивність праці.
Перед тим , як розглянути більш докладно призначення і застосування систем автоматики і телемеханіки, дамо коротке поняття автоматики і телемеханіки.
Автоматикою називається галузь науки і техніки, що охоплює теорію і принципи побудови автоматичних пристроїв і систем, що виконують свої основні функції без особистої участі людини.
Телемеханікою називається галузь науки і техніки, що охоплює теорію і принципи побудови пристроїв, що перетворять інформацію в сигнали і передають їх на відстані по лінії зв'язку для виміру, сигналізації і керування без особистої участі людини.
Часткова автоматизація – це автоматичне виконання окремих виробничих операцій.
Комплексна автоматизація – це автоматичне виконання усіх основних виробничих операцій ділянки, цеху, заводу як єдиного комплексу.
Повна автоматизація – це вища ступінь при якій виконуються усі основні та допоміжні операції виробництва, автоматизовані системи управління і контролю.
Системи автоматики, у залежності від виконуємих функцій, діляться на автоматичні системи контролю й автоматичні системи регулювання (або керування), останні у свою чергу можуть бути замкнутими або розімкнутими. Автоматична система контролю (АСК) здійснює порівняння контрольованого параметра з заданим (еталонним) його значенням і фіксування результатів порівняння у формі, зручної для спостереження і тривалого збереження. Контрольований параметр із контрольованого об'єкта надходить на датчик , у якому перетвориться в сигнал, зручний для виміру. З виходу датчика перетворений сигнал подається на пристрій , що порівнює . В останньому здійснюється порівняння перетвореного сигналу контрольованого параметру із сигналом еталонного параметру , що надходить з задаючого пристрою .
Отриманий результат подається на пристрій , що відтворює , тобто що вказує, сигналізує або записує значення контрольованого параметру. Задаючий пристрій може бути відсутній , якщо АСК призначена для виміру абсолютного значення контрольованого параметру.
Автоматична система керування (АСУ) розімкнена служить для автоматичного виконання операцій, що задаються зовнішніми джерелами впливів ( задаючими пристроями ) на вході цієї системи, причому самий процес керування не залежить від його кінцевого результату . У цій системі керування яким-небудь процесом або групою процесів, здійснюється без особистої участі людини. У даному випадку людина може лише подавати початковий пусковий імпульс, але частіше такий імпульс подається автоматичним пристроєм
Автоматична система регулювання (АСР) призначена для автоматичної підтримки з заданою точністю сталого значення однієї або декількох фізичних величин (регульованих параметрів ) об'єкта регулювання , що характеризують виробничий процес. Крім того, АСР може змінювати значення зазначених параметрів по заданому законі.
Автоматичну систему регулювання можна одержати, якщо об'єднати між собою автоматичні системи контролю і керування. Вона являє собою автоматичну систему з замкнутим ланцюгом впливів, у якої керуючий вплив виробляються в результаті порівняння дійсного значення керованого параметру з еталонним..
Якщо значення цих параметрів не рівні, то на виході пристрою , що порівнює сигнали , виникає сигнал від їхньої різниці, що впливає на систему таким чином, що в подальшому ця різниця автоматично зводиться до дуже малого значення (теоретично до нуля).
У промисловості при значній відстані між об'єктом і диспетчерським пунктом (пунктом керування) застосовуються системи телемеханіки, що відрізняються від систем автоматики тим, що мають додатково включені лінії зв'язку, приймачі і передавачі. Наприклад, за допомогою систем телемеханіки можна надійно здійснювати централізоване керування територіально роз'єднаними об'єктами.
По характеру функцій, які виконуються системи телемеханіки діляться на системи: телевимірювання (ТВ), телесигналізації (ТС), розімкнені системи телекерування (ТУ), телекерування і телесигналізації (ТУ — ТС) і замкнені системи телерегулювання (ТР).
Система телевимірювання призначена для передачі через лінію зв'язку на значні відстані різних значень вимірюваних електричних і неелектричних параметрів. У цій системі особлива увага приділяється зменшенню похибок , що виникають у результаті зміни робочих характеристик ліній зв'язку. Сигнал із контрольованого об'єкта надходить на датчик , а потім на передатчик , у якому він перетвориться в інший вид сигналу, зручний для передачі по лінії зв'язку . Пройшовши по лінії зв'язку, перетворений сигнал надходить на приймач , де відбувається перетворення сигналу у вид, зручний для впливу на відтворюючий пристрій . Останній може вказувати значення параметру , що вимірюється, записувати його або вводити в інші пристрої автоматики.
Система телесигналізації дозволяє передавати на значні відстані сигнали критичних і характерних проміжних значень контрольованих параметрів, сигналізуючи про стан контрольованого об'єкта. Для залучення уваги диспетчера про зміну стану об'єкта або можливості аварії на диспетчерському пункті передбачені звукові і світлові сигнали.
Схема розімкненої системи телекерування,- це система що здійснює передачу сигналів на включення або відключення різних механізмів керованого об'єкта. За допомогою системи телекерування можна також здійснити визів об'єктів телевимірювання. У розімкненій системі телекерування керований об'єкт знаходиться, як правило, недалеко від диспетчера, тому диспетчер може візуально спостерігати за виконанням посланих сигналів. Прикладом може служити керування будівельним краном не з кабіни крановика, а з землі за допомогою невеликого, переносного приладу з пультом керування і передавачем системи телемеханіки. У цьому випадку сигнали команд для керування рукоятками крана приймаються приймачем, що встановлюється на крані.
Система телекерування і телесигналізації в найпростішому вигляді являє собою об'єднання двох систем: розімкненої системи телекерування і системи телесигналізації. Вона являє собою комбіновану систему, у якій здійснюється подача командних сигналів із диспетчерського пункту (пункту керування) на керування механізмами об'єкта, а з контрольованого пункту (виконавчого пункту) приходить сигнал про виконання командного сигналу, тобто надходить інформація про включення і відключення того або іншого механізму керованого об'єкта. Система ТУ—ТС може застосовуватися для всіляких цілей, наприклад для керування польотом літака (ракети) або роботою генераторів на електростанції, розташованих далеко друг від друга.
З'єднання системи телевимірювання і розімкненої системи телекерування створює замкнуту систему телекерування . Ця система, що іноді називається системою телерегулювання, може застосовуватися, наприклад, у тому випадку, якщо потрібно збільшити об’єм рідини в цистерні до визначеного рівня. У цьому випадку диспетчер подає командний сигнал на включення необхідного насоса, що нагнітає рідину в цистерну, і за даними телевимірювань перевіряє рівень наповнення цистерни. При досягненні необхідного рівня, що перевіряється системою телевимірювання, диспетчер подає командний сигнал на відключення насоса. Прикладом замкнутої системи ТУ є система, за допомогою якої здійснюється заправлення паливом реактивних літаків у повітрі.
Лекція 3
Визначення і класифікація датчиків.
Параметричні датчики.
Датчики активного опору
Контактні датчики
Контактні датчики
Контактним датчиком називається датчик, у якому механічне переміщення перетвориться в замкнутий або розімкнутий стан контактів, що управляють однієї або декількома електричними ланцюгами. При замиканні контактів активний опір між ними змінюється від нескінченності до невеликого значення, а при розмиканні контактів він змінюється в зворотному напрямку, тобто від невеликого значення до нескінченності.
На рис. 3.1 зображений найпростіший контактний датчик, контакти якого замикаються або розмикаються при переміщенні щупа, що здійснює контроль товщини стрічки, що прокочується. Особливістю виміру за допомогою контактних датчиків є дискретність виміру, тому що контакти замикаються і розмикаються при визначеному положенні щупа.
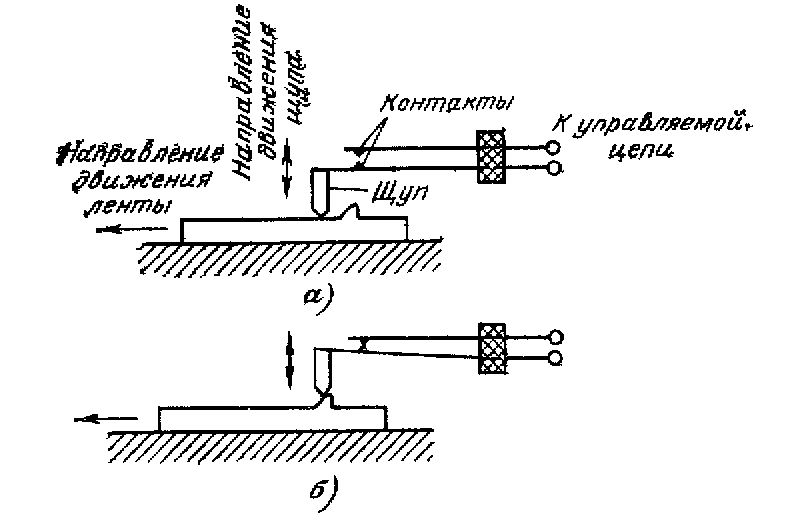
Рисунок 3.1 Найпростіший контактний датчик.
а-контакти розімкнені, б-контакти замкнені.
Контакти є самою важливою частиною датчика. Надійність і точність роботи датчика у великому ступені залежать від матеріалу і якості виготовлення контактів. Чим менше потужність, що розривається контактами датчика, тим менше відбувається обгорання контактів і тем вище точність роботи датчика. Матеріал для контактів вибирають, з огляду на умови роботи датчика, а саме: напруга, подавана на контакти, потужність керованого ланцюга, контактний тиск і т.п. У якості матеріалу для контактів застосовують срібло, вольфрам, золото, платину, сплави платини з іридієм. Контактні датчики широко застосовуються в машинобудівній промисловості при автоматичному контролі і сортуванню по лінійних розмірах виробів. Вони дозволяють сигналізувати переміщення з точністю до 1-2 мкм. Контактні датчики можуть включатися безпосередньо в керований ланцюг або за схемою “сіткового контакту” .
До пререваг цих датчиків відносяться: простота конструкції і порівняно висока точність до 1-2 мкм, а до недоліків—обгорання контактів (періодично доводиться зачищати контакти) і необхідність під регулювання контактів.
Потенціометричні (реостатні) датчики
Реостатний перетворювач становить регульований дротовий резистор з рухомими контактами, що змінює своє положення залежно від зміни вихідної величини.
В залежності від характеру зміни опору, розрізняють лінійні і функціональні потенціометричні датчики.
Схеми вмикання
Н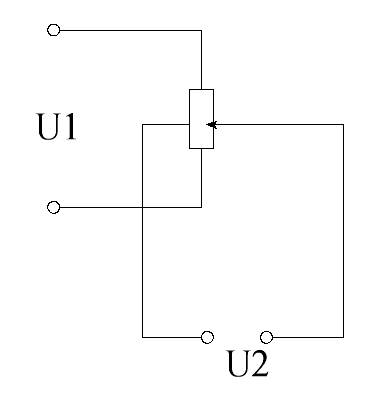 е
реверсивна Реверсивна
Мостова
е
реверсивна Реверсивна
Мостова
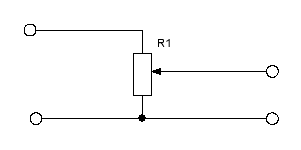
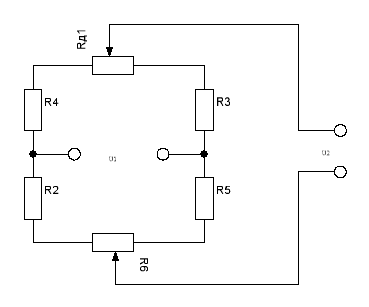
Рисунок 3.2 Схеми вмикання потенціометричного датчика
Мостові схеми звичайно мають малу нелінійність характеристики , тому знаходять широке застосування. Потенціометричні датчики складаються з проводу намотаного на каркас. Матеріал проводу : манганін, константан або фехраль. Повзунок виготовляють або зі сплаву платини з іридієм, або з срібла. Каркас виготовляють з текстоліту ,пластмаси або алюмінію.
Переваги :простота, невеликі маса та габарити, можливість живлення постійним і змінним струмом, стабільність. Недоліки :наявність рухомого контакту, низька чутливість. Застосовуються для вимірювання тиску рідин та газів, рівня рідини ,координат, переміщень, лінійних прискорень.