

Автоматичні системи прямого регулювання
У автоматичній системі прямого регулювання застосовується регулятор прямої дії . Прикладом цієї системи може служити система, призначена для автоматичної підтримки напруги генератора постійного струму на заданому рівні .
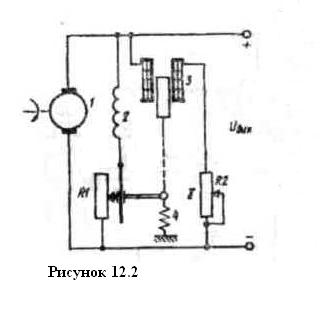
Схема складається : 1- якір генератора , 2 - обмотка збудження
R1-реостат в обмотці збудження, 3 електромагніт,4-пружина, R2- потенціометр .
При зміні вихідної напруги генератора
зміноється величина струму, який проходе в обмотці електромагніта. При зміні струму буде змінюватися струм в обмотці електромагніта і буде змінюватися електромеханічне зусилля .Якір буде переміщуватися до низу або вгору в залежності від полярності напруги.При переміщенні якоря переміщується повзун реостата R1. Його опір змінюється, змінюється струм обмотки збудження і напруга генератора приймає необхідне значення.
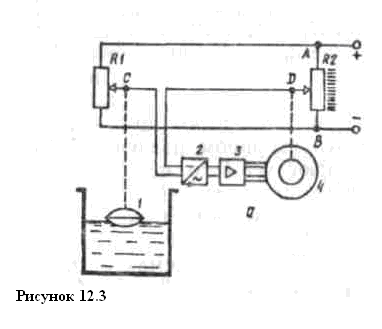
АСР непрямої дії регулювання рівня рідини.
Повзун С реостата R1 (рис. 12.3, а) переміщується залежно від змін рівня води в резервуарі. Якщо потенціал точки D відрізняється від потенціалу точки С, різниця потенціалів Uc—UD перетворюється на змінний струм, підсилюється й вмикає конденсаторний сервоелектродвигун, який переміщує повзун D доти, поки UD не зрівняється з Uc. Таким чином, повзун D слідкує за положенням повзуна С і повторює усі його переміщення. А в цілому ця система може бути використана для дистанційного вимірювання рівня води в резервуарі;
Лекція 13
АСР стабілізації і програмного регулювання
Автоматична система стабілізації
У цій системі використовується стабілізуючий автоматичний регулятор . Як приклад автоматичної системи, стабілізації можна розглянути автоматичну систему підтримки температури на заданому рівні (рисунок 13.1. )
Припустимо, що необхідно підтримувати постійну температуру в об'єкті О, наприклад в електричній печі.
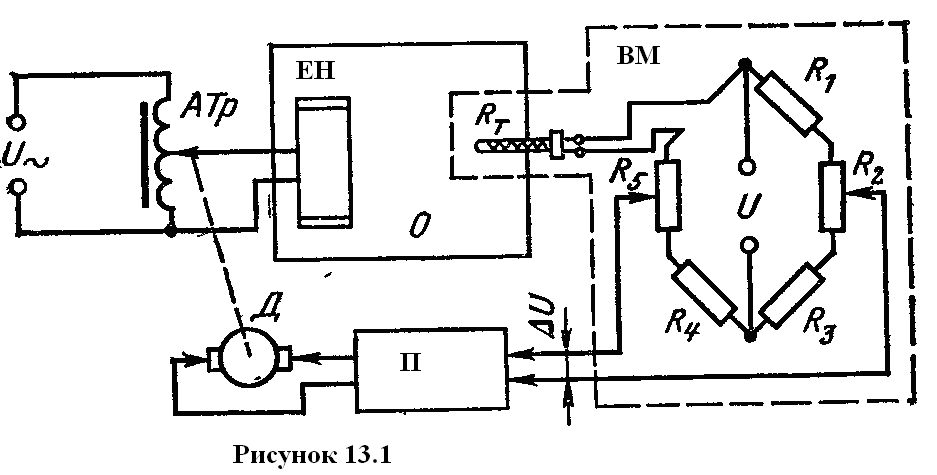
У тому випадку, коли температура в об'єкті дорівнює заданій, напруга розбаланса Δ U, що надходить з вимірювального моста ВМ , дорівнює нулю і система знаходиться в рівновазі. При зміні температури в об'єкті, наприклад, за рахунок зміни напруги мережі U~ струм, що проходить через електронагрівач ЕН, змінюється, а отже, змінюється опір термометра опору Rт і рівновага моста ВМ порушується. На вхід електронного підсилювача П надходить напруга розбалансу моста Δ U, фаза якого залежить від знака відхилення температури об'єкта від заданої. Напруга Δ U підсилюється і надходить на електродвигун Д, який починає обертатися в ту або іншу сторону в залежності від фази напруги Δ U. Вал двигуна переміщає движок автотрансформатора АТр доти, поки температура в об'єкті не стане дорівнювати заданій. При сталому режимі і відсутності обурюючих впливів система знаходиться в рівновазі. За допомогою движка реостата R2 установлюється задане значення температури в об'єкті.
А ср програмного регулювання
У програмній системі регулювання вихідна величина змінюється за заданим законом. Схема програмного регулювання показана на рисунку 13.2 .
Закон зміни температури задається за допомогою кулачка ,рівномірне обертання якого здійснює синхронний сервоелектродвигун з розщепленими полюсами 4.
Нагрівання здійснюється за допомогою електронагрівача ЕК у камері К. Первинним вимірювальним перетворювачем є термопара, електрорушійна сила et якої порівнюється з напругою Δ U, що знімається з подільника R. . Подільник R живиться від джерела стабільної напруги UCT.Оскільки et і Δ U ввімкнуті назустріч одне одному, при ΔU = et їх сума дорівнює нулю. Якщо температура в камері К вище заданої, то et>Δ U, величина et—ΔU перетворюється на змінний струм(1— перетворювач постійного струму у змінний), підсилюється(2 — підсилювач) і вмикає сервоелектродвигун 3 який переміщує повзун автотрансформатора 4 униз, зменшуючи напругу живлення нагрівача. У результаті температура у камері К не перевищує заданої межі. Якщо температура в камері нижче заданої, сервоелектродвигун перемістить повзун автотрансформатора вгору, збільшуючи температуру.
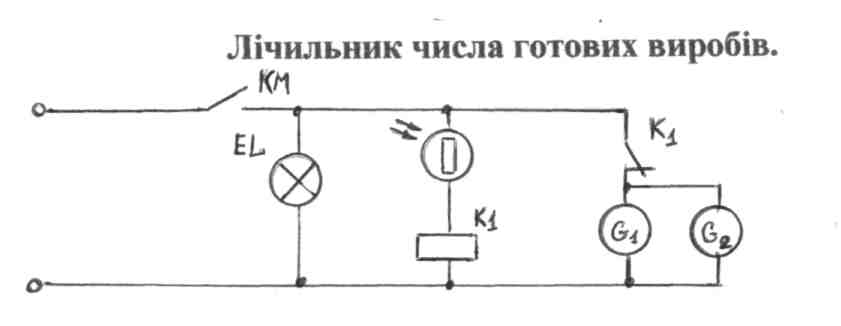
Ця схема вмикається контактом контактора KM, який керує приводом автотранспортера. Лічильник вмикається разом з пуском транспортера і вимикається одночасно з ним . Виріб переміщується разом з транспортером. Коли виробу між лампою і фоторезистором немає його електричний опір фоторезистора невеликий і через реле К1 проходить струм, контакт реле розімкнеться і відключить лічильник. Коли між лампою і фоторезистором буде знаходитись виріб, опір фоторезистора підвищиться ,струм зменшиться ,контакт К замкнеться і лічильник спрацює.
Лекція 14
Типові дінамічні ланки
Статичною характеристикою елементу - називається залежність сталих значень вихідної величини від значення величини на вході системи, тобто:
Yст. = f (X)
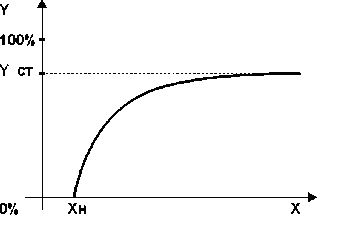
Статичну характеристику зображають у вигляді кривої Y(X) – рисунок 14.1
Рисунок 14.1 - Статична характеристика
Сталий режим (Yст) - це режим, при якому розбіжність між дійсним значенням регульованої величини і її заданим значенням буде постійною в часі.
Статичний елемент - у якого при постійному вхідному впливі з часом встановлюється постійна вихідна величина. Наприклад, при подачі на вхід нагрівача різних значень напруги він нагріватиметься до відповідних цим напругам значень температури.
Астатичний елемент - у якого при постійній вхідній дії сигнал на виході безперервно росте з постійною швидкістю, прискоренням і т.д.
Лінійний статичний елемент - безінерційний елемент, що має лінійну статичну характеристику вигляду:
Yст = k*X + b (14.1)
Як видно з формули (14.1), статична характеристика елементу має вид прямої з коефіцієнтом нахилу k і зсувом характеристики b.
Лінійні статичні характеристики, на відміну від нелінійних, більш зручні для вивчення завдяки своєї простоті. Якщо модель об’єкту нелінійна, то звичайно її приводять до лінійного вигляду шляхом методу лінеаризації.
Система управління називається статичною, якщо при постійній вхідній дії помилка управління Е прагне до постійного значення, залежного від величини дії.
Система управління називається астатичною, якщо при постійній вхідній дії помилка управління Е прагне до нуля незалежно від величини дії.