

Термістори
Термістори найчастіше використовуються для вимірювання температури на автомобілях. При зміні температури змінюється електричний опір термистора і вихідний сигнал датчика у вигляді струму або напруги.
В основному термистори мають негативний температурний коефіцієнт опору. Термістори, використовувані в автомобільній промисловості, мають опір від декількох кілоом при 0 до сотень Ом при 100 °С. Такий динамічний діапазон зміни опору вважається задовільним для всіх автомобільних потреб.
Термістори виготовляються з напівпровідників, наприклад, окислу нікелю або окислу кобальту. Їх формують у гранули стержні або пластини. При збільшенні температури в напівпровіднику росте кількість вільних електронів і зменшується електричний опір . Система вимірювання температури на основі термистора має високу чутливість,(-40 ….+8000С) оскільки відносно невеликі зміни температури приводять до значних змін опору.
![]()
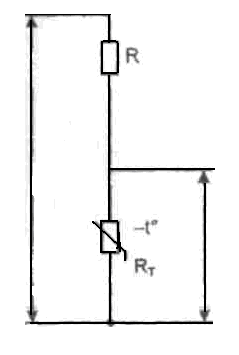
На показана проста схема перетворювача температури в напругу. Напруга живлення повинна бути стабільною, робочий струм не повинен нагрівати термістор, інакше виникають додаткові похибки. Температура термістора збільшується на 1 °С на кожні 1,3 мВт розсіюваної потужності.
Лекція 4
Параметричні датчики реактивного опору
Електромагнітні (індуктивні, трансформаторні, магнітопружні, і індукційні датчики)
Електромагнітні датчики засновані на використанні залежності характеристик магнітного кола (магнітного опору, магнітної проникності, магнітного потоку і ін.) при механічній дії на елементи цього кола. Вони застосовуються для вимірювання лінійних та кутових переміщень, тиску
Датчики, що перетворюють переміщення в зміну індуктивності, називають індуктивними (рис.4.1 а, б, в). Датчики, що перетворюють переміщення в зміну взаємної індуктивності (рис.4.1 г, д, е)у прийнято називати трансформаторними (або взаємоіндуктівними). У трансформаторних датчиках зміну взаємної індуктивності можна одержати не тільки при зміні повного опору, але і при переміщенні однієї з обмоток. Датчики, засновані на зміні магнітного опору, обумовленому зміною магнітної проникності феромагнітного осердя під впливом механічної деформації,, називають магнітопружніми(рис.4.1 ,ж, з, і). Датчики, в яких: швидкість зміни вимірюваного механічного параметра перетвориться в індуковану ЕРС, називають індукційними або: магнітоелектричними (рис 4.1 , к).
Індуктивні
датчики є дроселем з повітряним
зазором,
що змінюється, Δ
(див. мал. ,
а)
або
площею
S
поперечного
перерізу магнітопроводу,
що змінюється .Вихідним
параметром є зміна індуктивності L
(або
повного
опору Z)
обмотки, надітої на сердечник.
![]()
![]()
![]()
Широко поширені також індуктивні датчики соленоїдного типу з розімкненим магнітним колом (див. рис. 4.1 ,в).
Індуктивні датчики із змінним зазором (див. рис. 4.1 , а) мають обмежений діапазон вимірювань (від 0,01 до 2 мм), оскільки при більшому зазорі залежність L = f(Δ) стає нелінійною. Датчики з регульованою площею поперечного перетину магнітопроводу (див. рис 4.1. ,б) мають велику лінійність (у діапазоні до 5—8 мм). Датчики соленоїдного типу (див. рис.4.1 ,в) придатні для вимірювання великих переміщень (до 50—60 мм).
Недоліком індуктивних датчиків є наявність на виході постійної складової сигналу, для компенсації якої застосовують мостові або диференціальні схеми .Переваги : надійність, відсутність рухомого контакту, велика вихідна потужність.
Трансформаторні датчики є магнітопровідом з двома обмотками (див. мал. г, д) і феромагнітним осердям. При переміщенні осердя змінюється взаємна індуктивність обмоток. З метою зниження постійної складової сигналу на виході застосовують диференціально-трансформаторні схеми (див. рис 4.1 , е), в яких вторинні обмотки ω1’ і ω2" увімкнені зустрічно. Похибки цих датчиків викликається коливанням напруги і частоти живлення, температури.
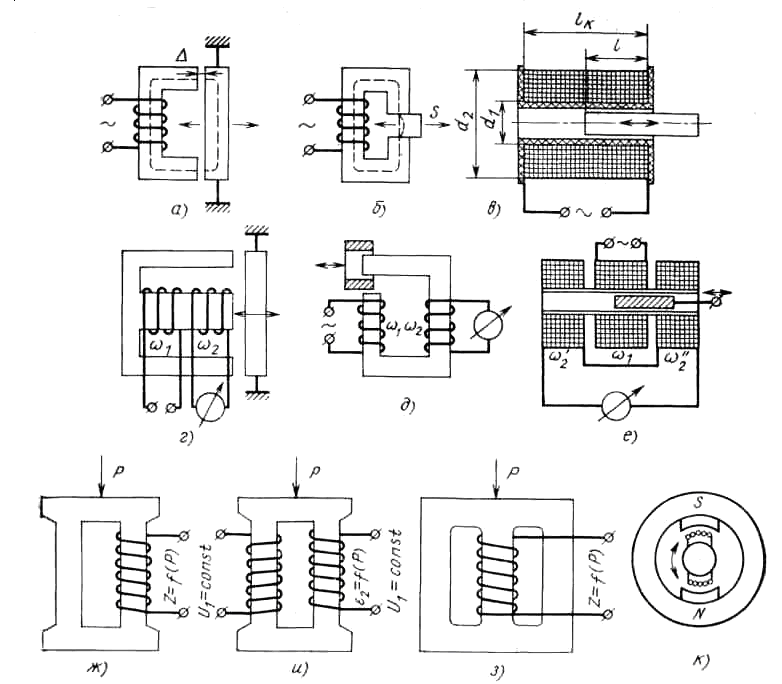
Рисунок 4.1 Принципові схеми електромагнітних датчиків
Перевагами трансформаторних датчиків є: високий коефіцієнт перетворення (можна працювати –без спеціальних підсилювальних пристроїв), простота конструкції.
Магнітопружні датчики ,це феромагнітне осердя з обмоткою, при деформації якого від стискаючих, розтягуючих або зкручуючих зусиль (Р) відбувається зміна магнітної проникності осердя і зміна його магнітного опору Z = f(P). Це приводить до зміни індуктивності обмотки, розташованої на осерді (див. рис 4.1. ж ,з),. або взаємної індуктивності між обмотками (див. рис 4.1 , і).
За принципом дії магнітопружні датчики діляться на дві групи: дросельного і трансформаторного типу. У датчиках дросельного типу (див. рис 4.1 ж, з) зміна магнітної проникності осердя приводить до зміни повного електричного опору Z котушки дроселя. Ці датчики прості, але чутливі до коливань напруги живлення і змін температури. Тому датчики дросельного типу застосовують при вимірюваннях, що не вимагають високої точності.
Магнітопружні датчики трансформаторного типу (див. рис.4.1 і) мають вищі коефіцієнт перетворення і точність, ніж дросельні.
Індукційні датчики виконують з постійним магнітом або електромагнітом, через обмотку якого пропускається постійний струм (див. рис 4.1 к). Ці датчики на відміну від розглянутих вище : індуктивних, трансформаторних і магнітопружніх відносяться до розряду генераторних, оскільки під впливом вхідної величини вони генерують електричну енергію. У них використовується явище електромагнітної індукції — наведення ЕРС в електричному контурі, в якому змінюється магнітний потік. ЕРС що наводиться в котушці залежить не від абсолютного значення магнітного потоку, а від швидкості його зміни усередині контуру. Тому індукційні датчики застосовують тільки для вимірювання: швидкості кутових або лінійних переміщень.
Датчики тиску на основі лінійних диференціальних трансформаторів (ЛДТ)
У цих датчиках зсув діафрагми перетворюється в переміщення осердя ЛДТ.
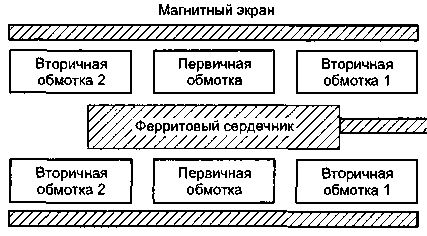
Лінійний диференціальний трансформатор — це електромеханічний пристрій, що виробляє вихідний електричний сигнал, пропорційний переміщенню феромагнітного осердя. ЛДТ складається з первинної і двох вторинних обмоток, симетрично розташованих на циліндровому каркасі. При вільному переміщенні усередині обмоток феромагнітне осердя у формі стержня забезпечує зв'язок цих обмоток через магнітний потік. На малюнку показана конструкція ЛДТ і приведена його принципова електрична схема.
При збудженні первинної обмотки за допомогою зовнішнього джерела змінної напруги в двох вторинних обмотках наводяться ЕРС взаємоіндукції. Вторинні обмотки увімкнені послідовно і зустрічно, тому результуючий вихідний сигнал перетворювача є різницею цих напруг і дорівнює нулю, коли осердя знаходиться в центральній (або в нульовій) позиції.
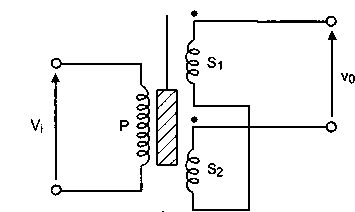
При відході осердя з цієї позиції напруга, яка індукована в тій вторинній обмотці, до якої рухається осердя, зростає, а напруга, індукована в іншій вторинній обмотці, зменшується. В результаті виробляється диференціальний вихідний сигнал, величина якого лінійно залежить від положення осердя. Фаза вихідної напруги змінюється стрибком на 180° під час переходу через нульову позицію.
Корисну інформацію про переміщення несуть амплітуда і фаза вихідного сигналу. Доводиться використовувати фазочутливі демодулятори, вони є в інтегральному виконанні.
ЛДТ забезпечує похибку перетворення переміщення осердя в напругу порядку 0,25%.
Первинна обмотка живиться синусоїдальною напругою 3...15 В з частотою 2...5 кГц. Коефіцієнт трансформації диференціального трансформатора 10:1...2:1.
ЛДТ характеризується відсутністю тертя, стабільністю нуля, гальванічною розв'язкою входу і виходу, може працювати в агресивних середовищах.
Індуктивні датчики (ІД) використовуються як поверхові перемикачі та перемикачі швидкості в схемах керування швидкохідними ліфтами. Загальний вигляд одного з варіантів конструкції датчика показаний на рис. 4.3, а. П-подібне сталеве шихтоване осердя 1, на якому розташована котушка 2, встановлюється в стовбурі шахти. Фасонна сталева скоба (магнітний шунт) 3 прикріплюється до кабіни. При розімкненій магнітній системі опір котушки датчика буде невеликим. Коли сталева скоба при русі кабіни перекриває магнітну систему датчика, різко збільшується його індуктивний опір і стрибком змінюється струм у колі котушки. Цю обставину можна використати для вмикання та відключення реле керування РП (рис. 4.3, б), що працюють на змінному або постійному струмі. Для забезпечення надійної та чіткої роботи реле паралельно котушці 2 вмикається конденсатор С, ємність якого підбирають з умови одержання в контурі режиму, близького до резонансу струмів.

1 – шихтоване осердя; 2 – котушка; 3 – магнітний шунт
а – загальний вигляд; б – схема вмикання
Рисунок .5 – Індукційний датчик
Все більше застосування знаходять також шляхові датчики типу ДПЭ з герконами .
Поверхові реле (їхня кількість дорівнює числу поверхів будинку) вмикаються по одному послідовно з котушками контакторів напрямку КВ або КН і служать для шунтування викличних і пускових кнопок.
Дверні контакти призначені для блокування, яке дозволяє кабіні ліфта переміщуватися лише при закритих дверях кабіни і шахти, що необхідно з міркувань безпеки. Дверні контакти являють собою малогабаритні кінцеві вимикачі для кіл керування (типів В-10, ВБ-30 тощо) з контактом, який замикається при зачиненні дверей.
Контакти підлоги мають такий же устрій, як і дверні. Вони приводяться в дію при вході пасажира в кабіну, тому що підлога кабіни виконується рухливою (однією стороною кріпиться на шарнірі). У схемах керування ліфтами контакти підлоги використовуються для різних цілей: для виключення виклику кабіни з пасажирами на інший поверх кнопками на поверхових площадках, для забезпечення виклику кабіни на поверхи після виходу пасажирів і зачинення дверей шахти, а також для переміщення порожньої кабіни при відчинених її дверях (у ліфтах старих конструкцій).
Контакти уловлювача зв'язані з механізмом захоплення уловлювача. При його спрацьовуванні контакти розмикаються і відключають двигун ліфта.
Магнітна відводка –– електромагнітний пристрій (застосовуються в ліфтах старих конструкцій), який встановлюється на кабіні та контролює роботу замків дверей шахти. Магнітна відводка має спеціальний упор, з'єднаний з якорем електромагніта. Коли кабіна знаходиться на поверсі, котушка магнітної відводки не отримує живлення, і під дією пружини упор відводить засувку замка дверей шахти, дозволяючи їх відчинити. При русі кабіни на котушку подається напруга, упор убирається, і двері шахти залишаються закритими. Такі відводки застосовувалися в ліфтах з ручним приводом дверей шахти.