

11. Механизмы прерывистого движения.
Храповые и мальтийские механизмы относятся к числу механизмов для преобразования непрерывного вращательного движения в прерывистое.
Х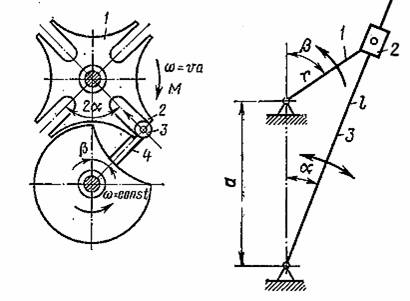 раповые
механизмы
могут быть с наружным и внутренним
зацеплением. В механизме с наружным
зацеплением, собачке сообщается
качательное движение. При движении
справа на лево собачка через зубья
храпового колеса поворачивает на
некоторый угол. При обратном ходе собачка
проскальзывает по зубьям храпового
колеса не вращая его. В храповом механизме
с внутренним зацеплением вал с жестко
посаженным на нем диском, к которому
прикреплена собачка, имеет колебательное
движение, и собачка, вращаясь слева
направо, поворачивает храповое колесо;
когда собачка движется в обратном
направлении, храповое колесо не вращается.
Качательное движение собачка получает
через шатун от ведущего кривошипного
диска с пальцем. Изменение положения
пальца в пазу в пазу (т.е. изменение
радиуса R) позволяет регулировать угол
поворота α собачки и тем самым угол
поворота храпового колеса за один оборот
ведущего диска. Движение храпового
колеса реверсируется переводом собачки
в положение, показанное тонкими линиями.
Изменить угол поворота храпового колеса
при неизменном положении кривошипного
пальца можно щитком, который закрывает
часть зубьев храпового колеса, и собачка
в начальный период движения скользит
по его поверхности, а затем, сходя с
него, захватывает зубья храпового колеса
и поворачивает его. Щиток в выбранном
положении удерживает фиксатор.
раповые
механизмы
могут быть с наружным и внутренним
зацеплением. В механизме с наружным
зацеплением, собачке сообщается
качательное движение. При движении
справа на лево собачка через зубья
храпового колеса поворачивает на
некоторый угол. При обратном ходе собачка
проскальзывает по зубьям храпового
колеса не вращая его. В храповом механизме
с внутренним зацеплением вал с жестко
посаженным на нем диском, к которому
прикреплена собачка, имеет колебательное
движение, и собачка, вращаясь слева
направо, поворачивает храповое колесо;
когда собачка движется в обратном
направлении, храповое колесо не вращается.
Качательное движение собачка получает
через шатун от ведущего кривошипного
диска с пальцем. Изменение положения
пальца в пазу в пазу (т.е. изменение
радиуса R) позволяет регулировать угол
поворота α собачки и тем самым угол
поворота храпового колеса за один оборот
ведущего диска. Движение храпового
колеса реверсируется переводом собачки
в положение, показанное тонкими линиями.
Изменить угол поворота храпового колеса
при неизменном положении кривошипного
пальца можно щитком, который закрывает
часть зубьев храпового колеса, и собачка
в начальный период движения скользит
по его поверхности, а затем, сходя с
него, захватывает зубья храпового колеса
и поворачивает его. Щиток в выбранном
положении удерживает фиксатор.
Мальтийские
механизмы
чаще всего применяют для периодического
поворота на постоянный угол револьверных
головок, шпиндельных блоков, столов
многошпиндельных автоматов и т.д.
Мальтийские механизмы бывают правильные
и неправильные. У правильных механизмов
крест имеет пазы с равномерным шагом;
у неправильных углы между смежными
пазами креста различные. В станках
применяют, как правило, правильные
мальтийские механизмы с внешним
зацеплением и радиальными пазами. В
мальтийском механизме при вращении
кривошипа палец или ролик заходит в паз
креста и за каждый оборот поворачивает
его на![]() часть (z – число пазов), т.е.
часть (z – число пазов), т.е.
передаточное
отношение мальтийского механизма ;
обычно z = 3...8.
;
обычно z = 3...8.
Основные соотношения параметров мальтийского механизма:
![]()
где α – половина центрального угла кривошипа за период поворота креста на угол β; β – половина угла между соседними пазами креста.
12.Механизмы обгона и реверсивные.
Р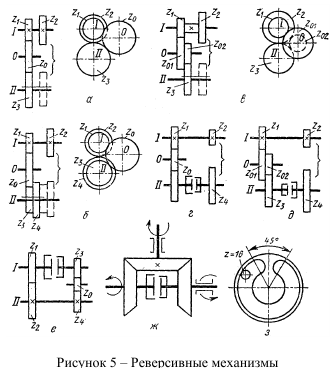 еверсивные:
направление движения в механизмах
станков можно изменять с помощью
различных механических, электрических
и гидравлических устройств. Наиболее
часто применяют реверсивные механизмы
с цилиндрическими и коническими колесами.
На рисунке 5 а, б, в показаны схемы
реверсивных механизмов с передвижными
зубчатыми колесами, а на рисунке 5 г, д,
е – с неподвижными колесами и муфтами.
В механизме с коническими зубчатыми
колесами (Рисунок 5ж) реверсирование
производится двусторонней кулачковой
муфтой. Направления вращения на рисунке
показаны стрелками.
еверсивные:
направление движения в механизмах
станков можно изменять с помощью
различных механических, электрических
и гидравлических устройств. Наиболее
часто применяют реверсивные механизмы
с цилиндрическими и коническими колесами.
На рисунке 5 а, б, в показаны схемы
реверсивных механизмов с передвижными
зубчатыми колесами, а на рисунке 5 г, д,
е – с неподвижными колесами и муфтами.
В механизме с коническими зубчатыми
колесами (Рисунок 5ж) реверсирование
производится двусторонней кулачковой
муфтой. Направления вращения на рисунке
показаны стрелками.
В некоторых моделях зубообрабатывающих станков применяют реверсивные механизмы, показанные на рисунке 5з. При неизменном направлении вращения зубчатого колеса z составное колесо получает возвратно-вращательное движение. Гидравлическое реверсирование осуществляется изменением направления потока масла в рабочий цилиндр, чаще всего с помощью направляющих гидрораспылителей, электрическое реверсирование путем изменения направления вращения электродвигателя привода. Также есть основные виды в альбоме Рисунок – Типовые механизмы для реверсирования движения
М еханизмы
обгона
(Рисунок 12) применяют в тех случаях,
когда требуется сообщить валу, имеющему
медленное (рабочее) вращение, быстрое
вращение (холостой ход). Чаще всего для
этих целей применяют муфты обгона или
храповые механизмы. На рисунке 12а
представлена схема роликовой муфты
обгона. Навалу 1 закреплен диск 2, имеющий
три выреза, в которых размещены ролики
3, поджимаемые пружинами 4. Если сообщить
колесу 5 вращение по стрелке, то ролики
3, заклиниваясь между поверхностями
диска 2 и колеса 5, будут вращать диск 2
и вал 1. Если сообщить валу более быстрое
вращение в том же направлении от другой
кинематической цепи, то диск 2 будет
обгонять колесо 5, заклинивание роликов
не происходит и будет осуществляться
холостой ход. После отключения быстрого
вращения вала снова произойдет
заклинивание роликов и будет осуществляться
рабочий ход.
еханизмы
обгона
(Рисунок 12) применяют в тех случаях,
когда требуется сообщить валу, имеющему
медленное (рабочее) вращение, быстрое
вращение (холостой ход). Чаще всего для
этих целей применяют муфты обгона или
храповые механизмы. На рисунке 12а
представлена схема роликовой муфты
обгона. Навалу 1 закреплен диск 2, имеющий
три выреза, в которых размещены ролики
3, поджимаемые пружинами 4. Если сообщить
колесу 5 вращение по стрелке, то ролики
3, заклиниваясь между поверхностями
диска 2 и колеса 5, будут вращать диск 2
и вал 1. Если сообщить валу более быстрое
вращение в том же направлении от другой
кинематической цепи, то диск 2 будет
обгонять колесо 5, заклинивание роликов
не происходит и будет осуществляться
холостой ход. После отключения быстрого
вращения вала снова произойдет
заклинивание роликов и будет осуществляться
рабочий ход.
На рисунке 12б приведена схема храпового механизма, применяемого в качестве механизма обгона. Храповое колесо 1 закреплено на валу 2. Защелка 3 связана с диском 4, свободно посаженным навалу 2 и получающем вращение от колеса 5. Сообщая диску 4 вращение в направлении стрелки, защелка 3 будет вращать храповое колесо 1 и вал 2 в том же направлении. Если сообщить валу 2 с храповым колесом 1 большую скорость вращения в том же направлении от другой кинематической цепи, то он будет обгонять диск 4. Обгонные механизмы