

Закон Гука.
Закона Гука описывается уравнением:
Fc = k · х.
Сила Fс деформирующая пружину колебательной системы прямо пропорциональна упругости (обратно пропорциональна гибкости) пружины и величине смещения х конца пружины. Рис.2
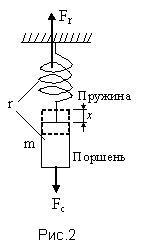
Сила растягивающая (сжимающая) пружину Fm (сила инерции массы m) в колебательной системе выражается формулой:
![]() ;
;
где x» - ускорение из 2-го закона Ньютона (F = ma), х - величина смещения поршня (или конца пружины) относительно состояния равновесия колебательной системы.
Трение r в колебательной системе создает силу Fr сопротивления противодействующую (направленную в противоположную сторону) силе Fc и растущую по мере растяжения или сжатия пружины. Пружина перестает растягиваться или сжиматься, когда растущая сила Fr становится равной силе Fc. Таким образом, трение обратно пропорционально скорости растяжения пружины:
![]() .
.
Тогда сила трения Fr будет равна:
![]() .
.
В электроакустических приборах возможно существование 2-х видов трения:
вязкое трение возникает за счет противодействия колебаниям поршня (груза на конце пружины) вязкости воздуха,
внутреннее трение возникает за счет трения частиц внутри материала пружины.
В соответствии с принципом Даламбера, согласно которому, сумма внешних сил, действующих на систему, находящуюся в равновесии, равна сумме сил противодействия (реакции), составим уравнение колебаний поршня:
![]() ;
;
то есть уравнение вынужденных колебаний будет иметь вид:
![]() .
.
Если противодействующие силы отсутствуют, что означает F = 0, то в колебательной системе колебаний нет или происходят свободные колебания. Запишем уравнение:
![]()
Незатухающие (на практике почти незатухающие) свободные колебания (колебания с большим по сравнению с временем наблюдения временем затухания) возможны при малой величине трения r → min. В этом случае можно принять r = 0. Тогда и x′·r → min. То есть можно принять, что x′·r = 0. Тогда уравнение свободных колебаний можно переписать:
![]() или
или ![]() ,
то есть
,
то есть
![]() ,
,
где, x» - ускорение смещения равно x» = ω2X, в уравнении свободных колебаний х достигает максимальных значений при х = Х. В этом случае можно записать:
![]() ,
, ![]() ,
, ![]() .
.
Поскольку
по определению
![]() ,
то
,
то
![]() ,
то есть
,
то есть
![]() .
.
Запишем окончательно:
![]() .
.
Так как математические преобразования проводились для режима отсутствия внешних вынуждающих воздействий и при силе трения равной 0 то можно окончательно записать уравнение для расчета частоты свободных колебаний ƒ0 колебательной системы. Ее часто называют также резонансной частотой колебательной системы, то есть такой частотой, с которой будут колебаться элементы системы, если они вообще будут колебаться при отсутствии внешних воздействий:
![]() .
.
Из уравнения частоты свободных колебаний видно, что частота свободных колебаний ƒ0 зависит только от массы m и гибкости Cm системы.
Существует аналогия между механической колебательной системой, рассмотренной выше, и электрической колебательной системой (электрический колебательный контур).
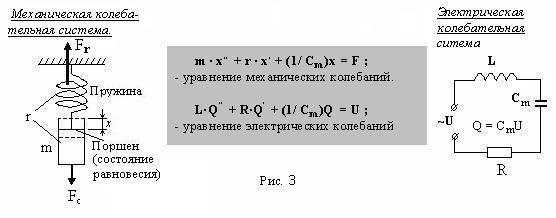
В этих уравнениях масса m, трение r и гибкость Cm аналогичны соответственно индуктивности L, активному сопротивлению R, и емкости Cm. Смещение х в механической системе аналогично электрическому заряду Q, смещаемому в электрической цепи на расстояние х.
Масса m и индуктивность L. Масса m, обладая инерцией, препятствует всякому изменению скорости (или смещению). Аналогично индуктивность L препятствует всякому изменению электрического тока в цепи.
Гибкость Cm механической системы и электрическая емкость C. Гибкость Cm системы, это способность накапливать энергию. Аналогично и в электрической цепи конденсатор С накапливает электрическую энергию в виде электрического заряда Q.
Механическое сопротивление r и электрическое сопротивление R. В механической системе, r оказывает сопротивление, за счет чего теряется энергия, преобразуясь в тепло. Аналогично в электрической цепи R оказывает сопротивление электрическому току, за счет чего теряется энергия, преобразуясь в тепло.
Аналогия есть и для переменных величин: Смещение х аналогично смещению электрического заряда Q. Скорость смещения (колебательная скорость х′), аналогична величине тока I = Q′. Механическая сила F, причина всех перемещений в механической системе, возбуждающая механические колебания, аналогична электрическому напряжению U, так как напряжение (справедливо и для ЭДС) является причиной перемещения электрических зарядов Q.
Аналоги механических и электрических величин покажем в таблице:
Механические величины |
Электрические величины |
||
Масса m |
кг |
Индуктивность L |
Гн |
Смещение х |
М |
Активное сопротивление R |
Ом |
Трение r |
кг/с |
Электрическая емкость Cm |
Ф |
Гибкость Cm |
м/Н |
Электрический заряд Q |
Кл |
Скорость х′(v) |
м/с |
Электрический ток I |
А |
Механическая сила F |
Н |
Напряжение, ЭДС |
В |
Электромеханические аналоги величин позволяют использовать законы электротехники для расчетов механических колебаний акустических систем: микрофонов, телефонов, громкоговорителей, стабилизаторов скорости и других устройств.
Иофе В. К., Лизунков М. В. Бытовые акустические системы. — М.; Радио и связь, 1984.