

5.2 Программная реализация последовательного корректирующего устройства
Для расчета реакции корректирующего устройства на внешние воздействия реализуем программно наше корректирующее устройство.
Передаточная функция корректирующего устройства имеет вид: ,
где
ТЖ1=1,0706 (с);
ТЖ2=6,1606 (с);
ТЖ3=0,0033856 (с);
Т = 0,15492 (с);
=0,96825;
Tт =0,05 (с);
Программная реализация корректирующего устройства предусматривает использование в своем составе импульсной системы – системы, где как минимум одна из описываемых систему координат подвергается квантованию по времени. Квантованные по времени величины при помощи импульсной модуляции преобразуются в чередование импульсов. Таким образом, импульсную систему для программной реализации целесообразно представить в виде комбинации импульсного элемента [3] (осуществляет процесс квантования величины по времени с преобразованием её в последовательность импульсов) и непрерывной части, составленной из типовых динамических звеньев (заданная система с включенным в нее ПКУ).

рис 5.11 схема САР с включенным в нее импульсным элементом
где
g - задающее воздействие;
y1 – сигнал, получаемый с импульсного элемента;
y - выходное воздействие (выходная величина);
НЧ – низкочастотная часть системы;
ФЭ - формирующий элемент;
ПНЧ - приведенная непрерывная часть системы.
WПКУ(s) - передаточная функция непрерывной части системы (последовательного корректирующего устройства).
Дискретную передаточную функцию WПКУ(z) последовательного корректирующего устройства целесообразно получить через передаточную функцию непрерывной части системы Wнч(S).
Выражение для дискретной передаточной функции разомкнутой импульсной системы [3 ]представлено в следующем виде:
![]() ,
,
где
![]() - импульсная функция последовательной
непрерывной части.
- импульсная функция последовательной
непрерывной части.
Для практического расчёта в целях упрощении рекомендуется представить передаточную функцию в виде следующего выражения:
![]() ,
,
где
![]() .
.
В
нашем случае импульсный элемент формирует
последовательность прямоугольных
импульсов длительностью
![]() , где γ
– величина скважности импульса). Тогда
расчетное соотношение для дискретной
передаточной функции разомкнутой
импульсной системы примет вид:
, где γ
– величина скважности импульса). Тогда
расчетное соотношение для дискретной
передаточной функции разомкнутой
импульсной системы примет вид:
![]() {
{
![]() Wнч(s)
}= W1(z,)
W1(z,),
Wнч(s)
}= W1(z,)
W1(z,),
где
![]() {
{
![]() Wнч(s)
};
Wнч(s)
};
![]() {
{
![]() Wнч(s)
}.
Wнч(s)
}.
В данном курсовом проекте используем импульсный элемент, который генерирует прямоугольные импульсы, длительность которых совпадает с периодом дискретности, т. е. значение скважности γ = 1. Данный формирующий элемент носит название экстраполятора нулевого порядка или запоминающего элемента. Дискретная передаточная функция тогда примет вид:
![]()
Можно определить дискретную передаточную функцию [3] WПКУ(z) корректирующего устройства, учитывая, что WНЧ(s) =WПКУ(s):

Для получения дискретной функции воспользуемся программой ТАУ. Выберем передаточную функцию корректирующего устройства и используем пункт “Дискретизация”. В поле “Частота ГЦ” вводим значение 1000. Принимаем рассчитанную передаточную функцию. АЧХ передаточной функции приведен на рис. 5.11.
{ Передаточная функция Wpku(z) }
Wpku(z) =
[
9,33862127455022E+02 {z^5};
-4,55132837640109E+03 {z^4};
8,87585287831254E+03 {z^3};
-8,65820590062517E+03 {z^2};
4,22485603597545E+03 {z^1};
-8,25036764716319E+02 {z^0}
] / [
1,00000000000000E+00 {z^5};
-4,23244694898799E+00 {z^4};
7,12625003443188E+00 {z^3};
-5,96727799354837E+00 {z^2};
2,48559911469971E+00 {z^1};
-4,12124206154579E-01 {z^0}
];
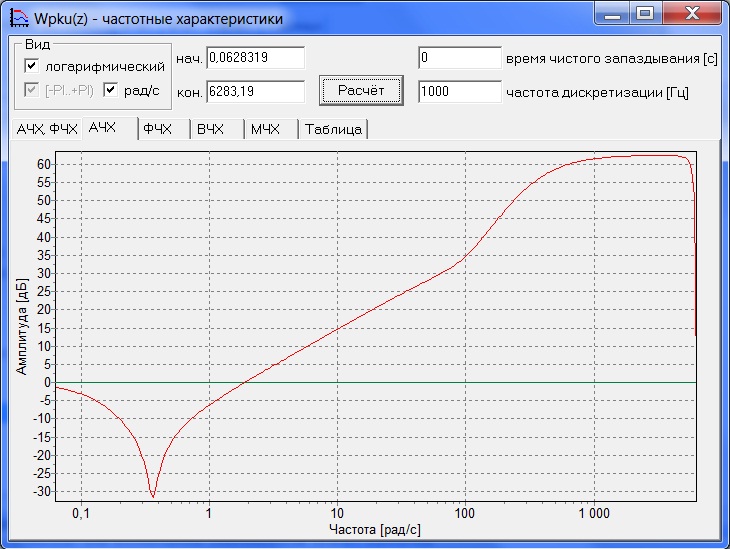
Рис.5.11 – АЧХ дискретной передаточной функции корректирующего устройства
Выполним преобразование дискретной передаточной функции корректирующего устройства к виду, удобному для построения структурной схемы решения.
![]() ;
;
Перейдем к разностному уравнению:

Выразим из полученного разностного уравнения y[n]:

На рис.5.12 изображена схема решения разностного уравнения [3]

Рис.5.12 схема решения разностного уравнения
Блок-схема алгоритма представлена на рис.5.13.

Рис.5.13-Блок-схема алгоритма
Блок-схема алгоритма функции расчета Raschet представлена на рис. 5.14.

Рис.5.14- Блок-схема алгоритма функции расчета Raschet
Программно реализуем наше корректирующее устройство на языке C++. Код программы с пояснениями приведен в приложении В.